CoursAPIL3AutomatiqueDépartementAutomatique
GHAOUTI16
Le GRAFCET
(GRAphe Fonctionnel de Commande des Etapes et Transition)
(SFC –S : Sequential -F : Fonction -C : Chart)
Historique :
En 1977, L’AFCET (Association Française pour la Cybernétique Économique et Technique) se
penche sur une formulation possible de règles régissant les automatismes séquentiels. Il en ressort une
méthode simple de description nommé GRAFCET. Par la suite, L’ADEPA (
A
gence nationale pour le
DE
veloppement de la
P
roduction
A
utomatisée) normalise les règles et s’assure de leurs diffusions.
Basé sur la notion d’étapes et de transitions, le GRAFCET (GRAphe Fonctionnel de Commande
Étapes-Transitions) permet de décrire facilement, à l’aide de peu de symboles, des automatismes
séquentiels complexes
Définition :
C’est un langage de programmation graphique permettant de définir le comportement séquentiel
d’un système automatisé à partir de la connaissance des actions à entreprendre, associées à des variables
de Sorties, et des évènements qui peuvent permettre le passage d’une situation à une autre, associé à des
variables d’Entrées.
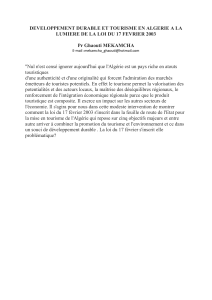
Exemple : Poinçonneuse semi-automatique
Considérons la poinçonneuse en sa position d’origine de repos (position haute)
L’opérateur donnant l’information « marche » par l’appui sur le bouton poussoir « BP » provoque
automatiquement la descente du poinçon jusqu'à la position basse suivie de sa remontée jusqu’à la
position haute. La poinçonneuse revienne à sa position d’origine de repos. Alors elle a décrit un cycle.
Cette machine possède 3comportements différents :
1 –la poinçonneuse est au repos (position haute)(1).
2 –le poinçon descend (2).
3 –le poinçon remonte (3).
Chaque comportement est appelé ETAPE.
De plus, il faut préciser ce qui provoque un changement de comportement de la machine, c'est-à-
dire les conditions logique qui déterminent le passage d’une étape à une autre :
Le passage d’une étape à une autre est appelé TRANSITION.

CoursAPIL3AutomatiqueDépartementAutomatique
GHAOUTI17
Les conditions logique sont appelées réceptivités.
Explication :
Le passage de l’état de repos à la descente du poinçon s’effectue si :
-L’opérateur appui sur le BP ET le poinçon est en position haute.
Ces 2 informations constituent la condition de transition de l’étape 1 à l’étape 2
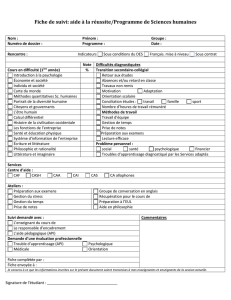
Symbolisation et éléments de base d’un GRAFCET :
1. Les étapes initiales, représentant les étapes actives au début du fonctionnement (lors du
passage de STOP en RUN), se différencient en doublant le carré.
2. Une étape correspond à une phase durant laquelle on effectue une ou plusieurs actions.
3. Une étape est ACTIVE ou INACTIVE.

CoursAPIL3AutomatiqueDépartementAutomatique
GHAOUTI18
4. A une étape i, on peut associer une variable binaire xi dont les états "0" et "1" sont
associés respectivement à l'inactivité et à l'activité de l'étape i.
5. une action n'est commandée que lorsque l'étape est active.
6. Une transition indique la possibilité d’évolution entre deux étapes successives.
7. Chaque transition est associée à une condition logique appelée réceptivité.
REGLES D’EVOLUTION D’UN GRAFCET :
La modification de l'état de l'automatisme est appelée évolution, et est régie par 5 règles :
Règle1
Les étapes INITIALES sont celles qui sont actives au début du fonctionnement. On les
représente en doublant les côtés des symboles. On appelle début du fonctionnement le moment où le
système n'a pas besoin de se souvenir de ce qui c'est passé auparavant (allumage du système, bouton
"reset",...). Les étapes initiales sont souvent des étapes d'attente pour ne pas effectuer une action
dangereuse par exemple à la fin d'une panne de secteur.
Règle 2
Une TRANSITION est soit validée, soit non validée (et pas à moitié validée). Elle est validée
lorsque toutes les étapes immédiatement précédentes sont actives (toutes celles reliées
directement à la double barre supérieure de la transition). Elle ne peut être FRANCHIE que
lorsqu'elle est validée et que sa réceptivité est vraie. Elle est alors obligatoirement franchie.
Règle 3
Le FRANCHISSEMENT d'une transition entraîne l'activation de TOUTES les étapes
immédiatement suivante et la désactivation de TOUTES les étapes immédiatement
précédentes (TOUTES se limitant à 1 s'il n'y a pas de double barre).
Règle 4
Plusieurs transitions SIMULTANEMENT franchissables sont simultanément franchies (ou
du moins toutes franchies dans un laps de temps négligeable pour le fonctionnement). La durée limite
dépend du "temps de réponse" nécessaire à l'application (très différent entre un système de poursuite
de missile et une ouverture de serre quand le soleil est suffisant).
Règle 5
Si une étape doit être à la fois activée et désactivée, elle RESTE active. Une temporisation ou
un compteur actionné par cette étape ne seraient pas réinitialisés. Cette règle est prévue pour lever toute
ambiguïté dans certains cas particuliers qui pourraient arriver dans certains cas :
Notion de point de vue

CoursAPIL3AutomatiqueDépartementAutomatique
GHAOUTI19
1 –Point de vue système
La description faite par un observateur se situant d'un point de vue externe au système, sans
distinguer la partie opérative et la partie commande
Le P de V système décrit le comportement du système vis à vis du produit.
On peut identifier les sorties point de vue système comme correspondant aux taches
opératives. Exp : serrer pièce. Percer. Tarauder.
Les entrées correspondent aux informations nécessaires sur l’ETAT DES MATIERES
et l’AVANCEMENT DES TACHES. Exp : Pièce serrée. Pièce percée. Pièce taraudée.
Le GRAFCET du point de vue système permet le dialogue entre le client et le concepteur pour la
spécification du système automatisé.
2 –Point de vue partie opérative
Description du comportement du système faite par un observateur se situant d'un point de vue
interne au système et externe à la PC. Les choix technologiques de la PO sont effectués.
Le P de V PO décrit les actions produites par les actionneurs à partir des informations
acquises par les capteurs.
Le GRAFCET du point de vue partie opérative permet le dialogue entre le concepteur de la partie
opérative et le concepteur de la partie commande.
Les SORTIES de la PC sont exprimées en termes d’ACTIONS et d’EFFETS à obtenir
de la part de la PO. Exp : Avancer tête de perçage. Faire tourner broche.
Les ENTREES de la PC sont constituées des INFORMATIONS à prélever
TRADUISANT L’ETAT de la PO.
3 –Point de vue partie commande
Description du comportement du système par un observateur se situant d'un point de vue interne à
la PC
Ce GRAFCET prend en compte les choix technologiques et l’ensemble des échanges PC PO
et PCPO
La notation retenue à ce niveau est la notation symbolique utilisant les repères du
dossier technique.
Les SORTIES de la PC sont principalement les ordres envoyés aux pré-actionneurs.
Exp : A+ pour provoquer la sortie de la tige du vérin A et (A- pour la rentrée)
Les ENTREES sont les signaux provenant des capteurs. Exp : a1 informe que le
capteur détectant la position sortie de la tige du vérin A (a0 la rentrée)
4 –Point de vue API
Description du comportement du système par un observateur se situant d'un point de vue interne à
l’API.
En trouve uniquement des adresses ENTREES / SORTIES et variables interne de l’API.
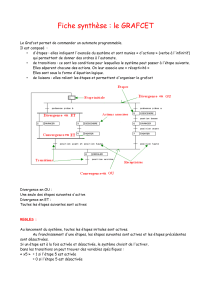
STRUCTURE DE BASE
1 –Actions continues
Une action associée à une étape est dite continue lorsque sa
durée d’exécution est identique à la durée d’activité de l’étape
2 –Actions simultanées

CoursAPIL3AutomatiqueDépartementAutomatique
GHAOUTI
20
Plusieurs actions sont commandées simultanément.
3–Actions conditionnées :
a)
-Une action conditionnelle est une action dont l’exécution est
soumise à une condition logique
b)
-Action retardée Type D (Delay)
L'action associée ne sera commandée qu'après une durée t à
partir de l'activation de l'étape.
c)
-Action limitée Type L (Limited)
L'action associée sera limitée à une durée t à partir de
l'activation de l'étape.
4 –Actions mémorisées
Action reste maintenue lorsque l’étape qui la
commande vient à être désactivée, il faut utiliser
une action mémorisée, ce qui est alors spécifiée
par les lettres symbole de début S (set) et de fin
d’action mémorisée R (reset)
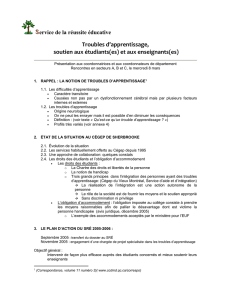
5 –Temporisation :
La réceptivité (3s/X11) ne devienne vraie que après 3s de
l’activation de l’étape 11.
Ou (T/X11/3s)
6 –Réceptivité toujours vraie : ( :=1)
7 –Réceptivité sur front montant ou front
descendant
Les réceptivités
a et
b ne sont vraies que lorsque la
variable change d'état,
respectivement le front montant
sera vrai lors du passage 0
1
de la variable et le front descendant lors du passage 1
0
.
8 –Comptage : permet de compter, décompter,
comparer,…
Remise à zéro du compteur CPTi
Incrémentation du compteur CPTi
2 [CPTi=0]
8 [CPTi=CPTi+1]
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%