Etude des systèmes automatisés - TD 2
Exercice 1
Tracer les évolutions temporelles des fonctions suivantes :
( 2)ut
et
(0,5. 1). ( 1)t u t
.
Exercice 2
Donner les expressions temporelles et symboliques (domaine Laplace) des fonctions suivantes (l’utilisation de
fonctions par morceaux est interdite, utiliser des fonctions de Heaviside avec retard
()ut
).
Exercice 3 : Etude d’un four
L’étude porte sur la modélisation du comportement d’une enceinte
chauffée. Une fois l’enceinte fermée, la température T au sein de
l’enceinte peut être supposée homogène (la même en tout point).
La capacité calorifique C de l’enceinte est telle que C = 2000 J/°C.
La résistance thermique R de l’enceinte est telle que R = 0.1 °C/W.
La température extérieure Te est constante et égale à 10 °C.
Le flux de chaleur fourni à l’enceinte pour élever sa température est noté qe ; qs représente le flux de
chaleur perdu par conduction thermique à travers les parois de l’enceinte.
Les équations de la thermique décrivant l’évolution dans le temps de température au sein de l’enceinte sont
les suivantes :
0
1
( ) ( ( ) ( )).
1
( ) ( ( ) )
t
T t Te qe qs d
C
qs t T t Te
R
les conditions initiales sont toutes nulles sauf : T(t=0) = Te
Entrée du système : qe(t) Sortie du système : s(t) = T(t) – Te
Posons S(p), Qs(p), Qe(p) les transformées de Laplace des grandeurs s(t), qs(t) et qe(t).
1- Ecrire les 2 équations précédentes dans le domaine symbolique. En déduire S(p) en fonction de Qe(p).
2- Préciser les valeurs et unités des coefficients intervenants.
3- Déterminer S(p) pour une entrée échelon de la forme qe(t)=q0.u(t) avec q0 = 500 W.
4- Déterminer s(t→∞), s(0), et s’(0) (utiliser le théorème des valeurs initiale et finale).
5- Déterminer, à partir de S(p), l’expression littérale de la réponse s(t), puis T(t).
6- Déterminer S(p) pour une entrée rampe de la forme qe(t)=q’0.t.u(t) avec q’0 = 50 W/s.
7- Déterminer s(t→∞), s’(t→∞), s(0), et s’(0). En déduire l’allure de s(t).
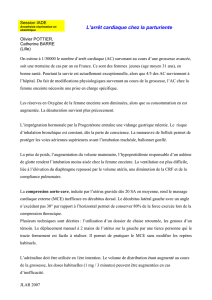
e2(t)
a
T
3T
t
5T
t
e1(t)
a
-a
T
2T
3T
qs
qs

Exercice 4
Soit un système caractérisé par sa fonction de transfert
2
1.
() 1 2. . . ( . )
p
Hp pp
.
1. Quelle valeur donner à
pour que l’erreur de traînage soit nulle ?
Pour la suite, on prend
égal à la valeur obtenue à la question précédente.
2. D’après l’étude des pôles de la fonction de transfert, déterminer l’allure de la réponse permanente
à une entrée de type Dirac.
Exercice 5
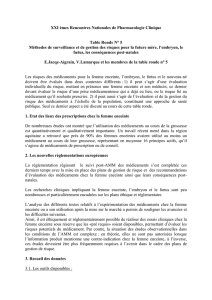
L’étude porte sur la modélisation du comportement d’un
amortisseur de voiture.
L’amortisseur complet de la voiture reliant la roue au
châssis peut être modélisé par un ressort de raideur K monté
en parallèle avec un vérin hydraulique de coefficient de
viscosité f. Le ressort et le vérin s’opposent à l’écartement
ou au rapprochement du châssis par rapport à la roue.
Afin de simplifier l’étude, le comportement est analysé sur un banc d’essai (voir schéma ci-dessous). Lors
des essais, la roue est fixée. Le châssis est initialement écarté d’une distance
0
x
par rapport à la position
d’équilibre.
L’essai débute à l’instant t = 0 correspondant au moment où le châssis
est relâché.
L’équation différentielle obtenue par application du principe fondamental de la dynamique est la suivante :
. ( ) . ( ) . ( )M x t K x t f x t
avec les conditions initiales :
( 0) 0t
xx
et
( 0) 0
t
x
.
1 – Déterminer l’expression de la réponse X(p) du système dans le domaine symbolique.
2 – Mettre X(p) sous forme canonique.
3 – Par l’étude des pôles de X(p), déterminer l’allure de x(t) en régime établi.
4 – Par le théorème approprié, déterminer la valeur de x(t) quand t tend vers l’infini.

Exercice 6 : Modélisation d’un moteur électrique à courant continu
Les équations classiques suivantes et les caractéristiques techniques et
notations usuelles définies ci-dessous permettent de proposer un modèle
de comportement d’un moteur à courant continu :
Equation électrique (Circuit RL avec f.c.e.m)
()
( ) . . ( ) ( )
mdi t
u t L r i t e t
dt
Equation mécanique (PFD en rotation)
𝐶(𝑡) = 𝐽𝑑𝜔 (𝑡)
𝑑𝑡
Equations électro-mécaniques
( ) . ( )
e
e t k t
( ) . ( )
c
C t k i t
1. Traduire chaque équation dans le domaine de Laplace.
2. A partir des équations précédentes, déterminer la fonction de transfert de ce moteur.
3. Déterminer la vitesse de rotation du moteur en régime permanent (temps infini) lorsqu’il est
alimenté sous une tension constante de 10 Volts.
Représentation du fonctionnement de ce moteur par schéma bloc :
On adoptera les conventions de représentions suivantes :
4. Compléter l’intérieur des blocs suivants afin de traduire les 4 équations de Laplace précédentes.
5. En déduire le schéma bloc relatif à ce moteur en complétant le schéma suivant :
Cette représentation permettra de calculer d’une deuxième manière la fonction de transfert de ce moteur
(voir cours suivant).
M
O
T
E
U
R
E
L
E
C
T
R
I
Q
U
E
Inductance (mH)
0,7L
Résistance interne (Ω)
9r
Constante de vitesse
V/(tr.min-1)
4
15.10
e
k
Constante de couple
mN.m/A
14,5
c
k
Force contre-
électromotrice
e(t) en V
Tension d’alimentation du
moteur
()
m
ut
en V
Courant du moteur
()it
en A
Vitesse de rotation de
l’arbre moteur
()t
en rd/s
Couple fourni par le
moteur
()Ct
en N.m
Inertie totale ramenée au
niveau du rotor (kg.m²)
7
4.10J
Domaine temporel :
Domaine symbolique :
H(p)
E(p)
S(p)
S(p) = H(p).E(p)
Z(p) = X(p) – Y(p)
Z(p)
X(p)
Y(p)
+
-
r
1
/
3
100%