ELECTRONIQUE DE PUISSANCE
Principes et structures des convertisseurs
Francis Weinachter

TABLE DES MATIERES
TABLE DES MATIERES ____________________________________________________2
Synthèse des convertisseurs statiques ___________________________________________4
I / Classification des convertisseurs statiques :_______________________________________ 4
II / Constitution des convertisseurs statiques : _______________________________________ 5
II.1 / Les sources : ____________________________________________________________________ 5
II.2 / Les interrupteurs : ________________________________________________________________ 7
III / La cellule de commutation : _________________________________________________ 11
III.1 / Définitions : ___________________________________________________________________ 12
III.2 / Règles de commutation : _________________________________________________________ 12
IV / Synthèse des convertisseurs statiques : ________________________________________ 15
IV.1 / Les configurations de base :_______________________________________________________ 15
IV.2 / Méthode de synthèse : ___________________________________________________________ 17
IV.3 / Application de la méthode de synthèse sur deux exemples : ______________________________ 18
Les hacheurs ______________________________________________________________23
I / Présentation : ______________________________________________________________ 23
II / Hacheurs à liaison directe : __________________________________________________ 23
II.1 / Le hacheur série : _______________________________________________________________ 23
II.2 / Le hacheur parallèle : ____________________________________________________________ 33
III / Hacheurs à liaison indirecte : ________________________________________________ 39
Alimentations à découpage isolées_____________________________________________41
I / Présentation : ______________________________________________________________ 41
II / Rappels sur les « transformateurs » : ( cas de deux enroulements) __________________ 41
III / Montage à accumulation « Fly-Back » : _______________________________________ 45
III.1 / Etude du fonctionnement : ________________________________________________________ 45
III.2 / Mode auto - oscillant : ___________________________________________________________ 49
IV / Montage direct « Forward » :________________________________________________ 50
IV.1 / Etude du fonctionnement :________________________________________________________ 51
IV.2 / Etude de la démagnétisation : _____________________________________________________ 55
Les onduleurs _____________________________________________________________56
I / Introduction : ______________________________________________________________ 56
I.1 / Définition : _____________________________________________________________________ 56
I.2 / Classification : __________________________________________________________________ 56
I.3 / Applications : ___________________________________________________________________ 57
II / Onduleur monophasé à un créneau par alternance :______________________________ 57
II.1 / Structure en demi – pont : _________________________________________________________ 57
II.2 / Structure en pont complet : ________________________________________________________ 60
III / Onduleur monophasé à modulation : _________________________________________ 63
III.1 / Principe ______________________________________________________________________ 63
III.2 / Modulation de la largeur d’impulsion : ______________________________________________ 68
IV / Onduleur triphasé : ________________________________________________________ 73
IV.1 / Fonctionnement à un créneau par alternance :_________________________________________ 74
IV.2 / Fonctionnement en M.L.I. : _______________________________________________________ 74
V / Onduleur de courant :_______________________________________________________ 75
VI / Onduleurs à résonance : ____________________________________________________ 77

Les gradateurs_____________________________________________________________81
I / Présentation : ______________________________________________________________ 81
II / Gradateur à commande de phase : ____________________________________________ 82
II.1 / Le gradateur monophasé : _________________________________________________________ 82
II.2 / Le gradateur triphasé :____________________________________________________________ 86
III / Gradateurs à commande par trains d’ondes : __________________________________ 87
III.1 / Principe : _____________________________________________________________________ 87
III.2 / Caractéristique usuelle de ce type de gradateur : _______________________________________ 87
Les redresseurs à thyristors __________________________________________________88
I / Introduction : ______________________________________________________________ 88
II / Les redresseurs triphasés : ___________________________________________________ 88
II.1 / Le montage à cathodes communes : _________________________________________________ 88
II.2 / Le montage à anodes communes :___________________________________________________ 91
II.3 / Montage en pont : (de Graëtz)______________________________________________________ 92
III / Les redresseurs monophasés : _______________________________________________ 95
III.1 / Charge Résistive : ______________________________________________________________ 95
III.2 / Charge R.L.E : _________________________________________________________________ 97
IV / Allure des caractéristiques <uc> = f(Ic) : _______________________________________ 99
Modélisation des convertisseurs statiques ______________________________________101
I / Introduction : _____________________________________________________________ 101
II / Calcul du gain statique :____________________________________________________ 101
II.1 / Cas des redresseurs à thyristors :___________________________________________________ 101
II.2 / Cas des hacheurs : ______________________________________________________________ 104
II.3 / Cas des onduleurs : _____________________________________________________________ 105
III / Constante de temps statistique et fonction de transfert :_________________________ 105
Bibliographie_____________________________________________________________106

Synthèse des convertisseurs statiques
Electronique de Puissance F. Weinachter 4
Synthèse des convertisseurs statiques
I / Classification des convertisseurs statiques :
Les convertisseurs statiques de l’électronique de puissance sont des dispositifs de
transformation de la forme de l’énergie électrique, permettant de relier un générateur et un
récepteur. Ces générateurs et récepteurs peuvent être soit continu soit alternatif.
Afin de pouvoir énumérer les différentes catégories de ces dispositifs, on classe les
générateurs et les récepteurs à relier en quatre groupes de sources comme le montre la figure
1.
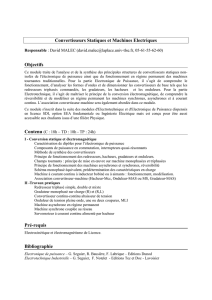
Figure 1 : Classification des convertisseurs statiques
On fait ainsi apparaître les différentes conversions à réaliser :
Les conversions directes :
• La conversion continu – continu est réalisée par un Hacheur.
• La conversion alternatif – continu est réalisée par un Redresseur.
• La conversion continu – alternatif est réalisée par un Onduleur.
• La conversion alternatif – alternatif est réalisée par
un Gradateur (si f1=f2)
un convertisseur direct de fréquence (si f1≠
≠≠
≠f2)
Les conversions indirectes :
Pour certaines applications, la transformation de l’énergie électrique est
réalisée par l’association de plusieurs convertisseurs à liaison directe. Comme le
montre la figure 1, l’association d’un redresseur et d’un onduleur permet la conversion
alternatif - alternatif en passant par un étage continu. On réalise ainsi un
convertisseur indirect de fréquence.
Onduleur
Redresseur
Gradateur
si f1=f2
Hacheur
Convertisseur
indirect de V
Convertisseur
indirect de f
Source continue
U1
Source continue
U2
Source alternative
V1,f1
Source alternative
V2,f2

Synthèse des convertisseurs statiques
Electronique de Puissance F. Weinachter 5
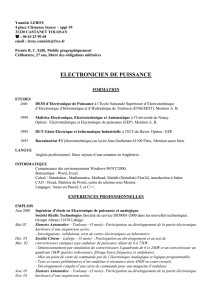
Exemples de convertisseurs indirects :
a) Convertisseur indirect de fréquence utilisé en traction électrique
b) Convertisseur indirect de tension (alimentation à découpage)
II / Constitution des convertisseurs statiques :
Afin de pouvoir synthétiser un convertisseur statique, il est nécessaire de connaître les
éléments qui le constitue, ainsi que les propriétés des sources entre lesquelles il est inséré.
Nous allons pour cela rappeler quelques notions sur les sources, puis nous
présenterons les éléments de base du convertisseur : les interrupteurs.
II.1 / Les sources :
II.1.1 / Définitions :
Source de tension :
La tension aux bornes d’une source de tension ne subit pas de discontinuité. Ce
qui se traduit par 0)(lim =
∞→ pZ
p.
Source de courant :
Le courant qui traverse une source de courant ne subit pas de discontinuité. Ce
qui se traduit par ∞=
∞→ )(lim pZ
p.
Source continue :
Une source est dite continue, si le courant qui la traverse est unidirectionnel.
(et/ou si la tension à ses bornes est unidirectionnelle).
Source alternative :
Une source est dite alternative, si le courant qui la traverse n’est pas
unidirectionnel. (et/ou si la tension à ses bornes n’est pas unidirectionnelle).
=
=
∼∼
Redresseur OnduleurHacheur
Charge
Onduleur Redresseur
=
=
∼∼
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
1
/
106
100%