http://www.coursgeniemecanique.com/
Mécanlque pour Ingénieurs
Volume 1: Statique
Ferdinand P. Beer
Traduchon de Vector Mech81lics for Engineers: Statfes. © 1998.
1988. 1964, 19n. 1972. 1962 McGraw-Hili Ryers.on
LimltOO. a Subsidiary of the McGraw·Hili comcames.
(ISBN 0-07-560076-5) e 1996.1988,1984,1977,1972,
1962 McGraw-Hill, Inc.
~ 2004 Les Ëditions de la Chenelière IOC.
Éditeur: Michel Poulin
Coordination: Monique Pratte
Révision lingufstique: Julie Beauheu
Correction d'épreuves: NIcole Demers
Infographfe : Intoscan Collette
Couverture: Michel Bérard
Maquette intérieure: Merril Haber
Ilfustrallons: FineLine Illustrations, Inc.
CataJogage avant publication
de la Bibliothèque nationale du Canada
Beer. Ferdinand p,. 1915'
Mécanique pour Ingénieurs
Traduction de la 3· édition de: Vector MechanicS for Englneers.
Third SI Metric êdmon.
Comprend des index.
Sommaire: (1) Statique - [2] Dynamique.
ISBN 2-7651-0157·4 (v. 1)
ISBN 2-7651-0158-2 (v. 2)
1. Mécanique appliquée. 2. Analyse vectorielle. 3.
4. Dynamique. 5. Mécanique appliquée - Problèmes
exercices. 1. Johnston, E. Russell (Elwood Russell),
II. Eisenberg, Elliot R. III. Benedetti, Claudlo,l949-.
Statique.
et
1925- .
IV. Youssef.
Youssef AMou, V. Tltre.
TA350.B37142003
620.1 '0
C2003-941232-6
ChenellèrelMcGraw-H1I1
7001, bout. Salnl·Laurent
Montréal (QuébeC)
Canada H2S 3E3
Téléphone: (514) 273-1066
Télécopieur: (514) 276·0324
chen&@dlcmcgrawhlll.ca
Tous droits réservés.
Toute reproduction, en tout ou en partie, sous quelque rorme et par
quelque procédé que ce soit, est InterdIte sans l'autorisation écrrt9
préalable de l'Ëdlteur.
ISBN 2-1651-0157-4
Dépôt légal: 1er trimestre 2004
Bibliothèque nationale du Ouébec
Bibliothèque nationale du Canada
Imprimé au Canada
3 4 5 ITIB 11 10 09 08
Nous reoonnaissons l'aide financière du gouvernement du Canada
par l'entremise du Programme d'aide au développement de
l'industrie de l'édition (PADIÉ) pour nos activités d'édition.
Gouvernement du Québec - Programme de crédit d'impôt pour
l'édition de livres - Gostion SODEC
LE
L'Éditeur a lait tout ce qui était en son pouvoir pour retrouver les
copyrights. On peut lui signaler tout renseignement menant à la
correction d'erreurs ou d'omissions.
PHOTOCOPILLAGE
TUE LE LIVRE
Table des matières
Avant-propos
III
1
INTRODUCTION
1
1.1
1.2
1.3
1.4
1.5
Qu'est-ce que la mécanique?
2
Concepts et principes fondamentaux.
Systèmes d'unités
5
Méthode de résolution de problèmes
Précision des yaleurs
9
2
8
2
LA STATIQUE DES PARTICULES
1.1
2.1
Introduction
12
Forces coplanaires
12
2.2 Résultante de deux forces agissant sur la même patlicule
12
2.3 Vecteurs
13
2.4 Addition vectorielle
13
2.5 Résultante de forces concourantes
15
2.6 Déoomposition d'un vecteur force
16
2.7 Composantes rectangulaires d'une force et vecteurs unitaires
22
2.8 Somme des forces par la méthode des composantes
24
2.9 Équilibre d'une particule
30
2.1 0 Première loi de Newton
31
2.11 Problèmes sur l'équilibre d'une particule: diagrammes des forces
31
2.12
2.13
2.14
2.15
Fort;es dans l'espace (30)
39
Composantes rectangulaires dans "espace
39
Force définie par sa grandeur et deux points
sur sa ligne d'action
42
Addition de forces concourantes dans l'espace
43
51
Équilibre d'une particule dans "espace (3D)
Résumé
58
Problèmes supplémentaires
61
v
a
CORPS RIGIDES - SYSTÈMES DE FORCES ÉaUIVALENTS
.6.5
3.1
32
3.3
3.4
3.5
3.6
3.7
3.8
3.9
3 1Q
3.11
Introduclion
66
Forces Internes el forces externes
66
Principes d:e transmissibilité - Forces équivalentes
Produit vectoriel de deux vecteurs
68
Composantes rectangulajres des produits vectoriels
Moment d'une torce par rapport à un point
71
67
70
Théorème de Varignon
73
Composantes rectangulaires d'un moment de force
produit scalaire de deux vecteurs
83
produit mixte de Icols vecteurs
85
Moment d'une force par rapport à un axe
86
3.12 Moment d'un couple
97
3.13 Couples équivalents
98
3.14 Addition des couples
100
3.15 Représentation vectorielle des oouples
100
3.16 Décomposition d'une force en une force et un couple
3.17 Réduction d'un système de forces à une force
73
101
et un couple
3.18 Systèmes
3.19 Systèmes
3.20 Réduction
·3.21 Réduction
Resume
Problèmes
112
de forces équivalents
113
équipollents de vecteurs
114
supplémentaire d'un système de forces
114
d'un système de forces a un torseur
117
136
supplémentaires
141
4
EQUILIBRE DES CORPS RIGIDES
145
4.1
4.2
4.3
4.4
4.5
4.6
4,7
Introduction
146
Diagramme du corps libre
146
Equilibre dans un plan
147
Réactions des appuis et des üalsons
de structures planes (bidimensionnelles)
147
Ëquilibre d'un corps rigide bidimensionnel
148
Réactions statiquement indéterminées - Liaisons partielles
Équilibre
d'un corps soumis à deux forces
166
,
Equilibre d'un corps soumis à trois forces
167
.
4.8
4.9
Equilibre dans un espace tridimensionnel
Équilibre d'un corps rigide en trois dimensions
Réactions d'appui et de liaison dans l'espace
Résyme
Problemes
150
173
173
174
190
supplementaires
192
5
FORCES RÉPARTIES: CENTROïoES ET CENTRE DE GRAVITÉ
197
5.1
1 ntroduction
198
Surfaces et courbes
5.2
5.3
5.4
1~.R
Centre de gravité d'un corps plan
198
Centroides des surfaces et des courbes
199
Moments statiques des surfaces el des courbes
200
5.5
5.6
5.7
'5.8
'5.9
Tab4e dos maueres
Figures composées
203
Détermination des centroides par intégration
213
Théorèmes de Pappus-Guldlnus
214
Charges réparties sur des poutres
224
Forces sur des surfaces hydrost.atiques
225
volymes
234
5.10 Centre de gravité d'un solide - CentroYde d'un volume
5.11 Sotides composés
235
5.12 Détermination du cenlroïde d'un volume par intégration
Résumé
248
Problèmes sup,plémentarre.s
234
237
252
6
a'UDE
DES STRUCTURES
a56.
6.1
6.2
6.3
6.4
"6.5
"6.6
6.7
"6.8
Introduction
257
Les trelllis
258
Définitiond'un treillis
258
TreIllis simples
259
Analyse d'un treillis par la méthode des nœuds
Nœuds sous conditions particulières de charges
Treillis tridimensionnels (Triangulation spatiale)
Analysa d'un treiHis par la méthode des sections
Treillis composés
275
260
262
263
274
Charpentes et mécanismes
285
6.9
Structures comportant des membres à ettort multiple
6.10 Analysa des structures
285
6.11 Charpentes hyporigides (non rigides)
286
6.12 Mécanismes
300
Résumé
285
313
Problèmes supplémentaires
316
1
LES POUTRES ET LE.S CÂBLES
~
"7.1
*7.2
Introduction
322
Forces Internes dans un élément de struclure
322
les poutres
*7.3
*7.4
*7.5
'7.6
329
Types de charges et d'appuis
329
Effort tranchant et moment 1Iêchlssant
330
Diagrammes de l'effort tranchant et du moment fléchissant
Charge, effort tranchant et moment fléchissant
340
Les câbles
"7.7
351
Câbles avec charges concentrées
~7.8 Câbles avec charges réparties
'7.9
Câble parabolique
353
*].10 CharnelleS
362
Résumé
370
Problèmes supplémentaires
373
351
352
332
VII
VIII
Table des matières
8
EROTIEM'ENI
376
8.1
8.2
8.3
Introduction
a77
Lois et coefficients du frottement sec
Angles de frottement
379
8.4
8.5
8.6
Problèmes impliquant le frottement sec
Coins
395
Vis à filetage carré
395
377
380
•
·S.8
Butées
405
""8.9
Roues et résistance au roulement
'8.10 Courroies
413
Résumé
423
Problèmes supplémentaires
406
426
9
FORces RÉPARTIES; MOMENTS D"INERTIE
Ul
9.1
Introduction
432
Moments d'Inertie
des surfaces
432
432
9.2
Deuxième moment 011 moment d'inertie d'une surface
9.3
9.4
9.5
9.6
9.7
Détermination du moment d'Inertie d'une surface par Intégration
Moment d'inertie polaire
435
Rayon de giration de surfaces
435
Théorème des axes parallèles
442
Moments d'inertie des surfaces composées
444
'9.8
Prodllit d'jnertie
434
456
"9.9 Axes principaux el moments principaux d'inertie
"9.10 Cercle de Mohr
465
Moments d'Inertie des maSSes
9.11 Moment d'inertie d'Ilne masse
456
471
471
9.12 Théorème des ax&s parallèles
472
9.13 Moments d'inertie de plaques minces
473
9.14 Détermlnation du moment d'Inertie d'un solide paf' Intégration
475
9.15 Moments d'jnert~ des solides composés
475
·9.16 Moments d'inertie d'un solide par rapport à un axe passant par I"origine.
Produit d'inertie d'une masse
490
*9.17 Ellipsoïde d'InertIe. Axes principaux d'inertie
491
·9.18 Axes princlpaux 'et moments principaux d'inertie d'un solide
de forme quelconque
Résumé
492
504
Problèmessupplémentaires
510
Visiter notre site http://www.coursgeniemecanique.com/ et choisissez
la rubrique :
Livres
1ntrod ucti on
t:lngé"ne moderne repose en grando parUe sur les lois fondamentales do
la mécanique. énoncées par Sil Isaac Newton à la tin du dix-septième siècle.
C P
1.1 QU'EST-CE QUE LA MÉCANIQUE?
La mécanique est la science quj étudie les états de repos et de mouvement
des corps soumis à l'action de forces; elle décrit ces états et les prédit. EUe
se divise en trois branches principales: la mécanique des corps rigides, la
mécanique des corps (léfor/Tuibles et la mécanj(lue desfluides.
La mécanique des corps rigides comprend la statique, qui traite des corps
au repos, et la dqnanüque, qu.i considère tes corps en mouvement Dans les
deux cas, elle fait l'hypothèse que les corps sont parfaitement rigides. Cependant. les structures et les machines réelles ne sont jamais tout à fait rigides :
elles se déforment sous les charges appliquées. Ces déformations, plutôt
faibles, ont habituellement peu d'incidence sur l'équilibre ou le mouvement
d'une structure. EUes prennent cependant toute leur importance lorsque
vient le temps d'analyser la résistance à la rupture. Elles entrent en ligne de
compte dans l'étude des matériaux, qui constitue une division de la mécanique des corps déformables, La troisième branche de la mécanique est la
mécanique des fluides, qui aborde l'étude des fluides compressibles et des
fluides incompressibles. 'LhYllr{Juliquc, science flui étudié l'écoulement de
l'eau l, occupe une place privilégiée dans l'analyse des fluides tnccmpressibles,
La mécanique est UDe branche de la physique puisqu 'elle traite de phénomènes physiques. Cependant, on l'associe parfuis davantage à l'ingénierie ou
aux mathématiques, et œs points de vue se défendent. En effet, la mécanique
s'avère un préalable tndispeusable à J'étude de l'ingénierie, qui repose en
grande partie sur elle. La mécanique n'a cependant pas le caractère empirique
de l'ingénierie, c'est-à-dire que ses théories ne s'appuient pas uniquement sur
l'expérimentation ou l'observation. En ce sens, elle ressemble davantage aux
mathématiques par sa ri&rueur et par l'Importance accordée au raisonnement
déductif. On ne peut cependant pas non plus la classer comme une science
abstraite Di comme une science pllre. La mécanique est en réalité une science
appliquée: elle il pour but d'expliquer des phénomènes physiques et de les
prédire, et elle établit, par le fait même, tes bases de l'ingénierie.
1.2 CONCEPTS ET PRINCIPES FONDAMENTAUX
Bien que les débuts de la mécanique remontent à une époque fort
lointaine, avec les travaux d'Aristote (384-322 av. J.• C.) et d'Archimède
(287-212 av. J.-C.). il a fallu attendre les trav-aux de Newton (l642-1727)
pour en énoncer clairement les principes de base, Ces derniers seront plus
tard reformulés par d'Alembert, Lagrange et Hamilton, mais leur validité
ne sera remise en cause qu'au vingtième siècle. avec l'arrivée de la théorie
de la re1ativiti d'Etnstein (1905). Les limite.') de la mécanique newtonienne
sont aujourd'hui bien connues, mais l'ingénierie moderne repose toujours
Sur ses principes fondatnentaux, énoncés il ya plus de trois siècles,
La mécanique s'appuie sur les concepts fondamentaux d'espace. de
temps, de masse et de force, que l'on ne peut pas véritablement définir,
Lexpénenœ personnelle et l'intuition en donnent une compréhension qui
servira de cadre de référence à notre étude.
On associe le concept ,l'espace à la position d'un point P. Cette position
est définie par trois longueurs mesurées dans trois directions différentes, à
partir d'un même point de référence appelé origine. Ces trois longueurs
portent le nom de coordonnées ÙU point P.
Pour décrire un événement, il ne suffit pas d'en donner la position; il
faut ëgslement prendre en compte la notion de temps,
Le concept de masse caractérise les corps et permet de comparer leur
comportement dans certaines expériences fondamentales. Par exemple, deux
1. t:bydmuliquc trnite des liquides on g~nérnl: pour des raisons évidentes, l'eau rep~lIie
le Cl1S
le plus répafldu. (NdT)
Copynghted ma rial
corps de même nH1SS~sont également attirés par la terre; ils offrent aussi
la même résistance au changement dans un mouvement de translation.
Une force représente l'action d'un corps sur un autre çorps. Elle s'exerce
à leur contact ou encore à distance comme dans le cas de la gravitation et des
1,2 Concepl.!l el pnllClpes londamentaux
forces magnétiques. On caractérise une force par son point d'application, sa
grandeur et sa dtreaton, et 00 la représente par un cecteur (section 2.3).
En mécanique newtonienne, l'espace, le temps et la masse sont des
concepts absolus, indépendants les uns des autres. (La situation diffère en
mécanique relattoiste . Je ten ..ps associé à un événement dépend alors de sa
position et la masse d'un corps est fonction de sa vïresse.J Par contre. le
concept de force est dépendant des trois autres; en effet, l'un des principes
fondamentaux de la mécanique newtonienne statue que la force résultante
agissant sur un corps dépend de sa masse el de son accélération, c'està-dire de la façon dont sa vitesse varie dans le temps.
Ce livre porte sur les états de mouvement et dc repos de particules et
(le corps ri!,l'iùes. en fonction des lfuatre concepts introduits précédemment.
Une particule correspond à une très petite quantité de matière qui occuperait un seul point dans l'espace. Un corps rigide résulte <le lu combinaison
d'un grand n0I111>r(>
de particules en positions fixes les unes par rapport aux
autres. L'étude des particules est cn conséquence préalable à celle des corps
rigides. De plus, on peut souvent utiliser les résultats obtenus avec une
particule pour traiter de problèmes relatifs à l'état de mouvement ou de
repos d'un corps réel.
L'étude de la mécanique repose sur six principes fondamentaux établis
expérimentalement.
de« [orcr
Inr/hl)C/t'
(Ill 1>0rnl'f;/o!!,rfl 111I1U'
Deux forees
agissant sur une particule peuvent être remplacées par une force unique
équivalente appelée résultante, obtenue en dessinant la diagonale du parallélogramme dont le côtés correspondent aux forces de départ (section 2.2).
L'{/l/flitlt:,f{
Le principe {Ir Ir(/nçnlÏ\sibi/ité. Léquilibre ou le mouvement d'un corps
rigide n'est pas rnodiûé si l'on remplace une force agissant sur un point
donné du corps par une autre force de même grandeur et de même direc-
tion appliquée à 'ln autre point du corps, à condition que les forces soient
situées sur la même ligne d'action (section 3.3).
Les 1rot« fois de 1\'('((:1011. Énoncées pa.r Sir Isaac Newton vers la An du
dix-septième siëclc, ces lois sc résument ainsi:
est
nulle, cette particule reste au repos si elle était initialement au repos, alors
qu'elle poursuivra son mouvement à vitesse constante suivant une ligne
droite si eUe était initialement en mouvement (section 2.10).
Première
101. Lorsque la force résultante agissant sur une particule
la force résultante agissant sur une particule
n'est pas nulle, cette particule subira une accélération proportionnelle à la
grandeur de la force et selon la même direction qu'elle. Cette loi peut
s'écrire (section 12.2):
Deuxiéme
101. Lorsque
F=ma
(1.1)
où F, '11 et a représentent respectivement la force résultante agissant sur la
particule. la masse de la particule et son accélération, exprimées dans un
système d'unités eohérenr.
Troisième 101.Les forces d'action et de réaction agissallt sur deux corps
tJui se touchent sont de même grandeur mais de sens opposé; de plus. elles
agissent selon la même ligne d'action (section 6.1).
c
3
4
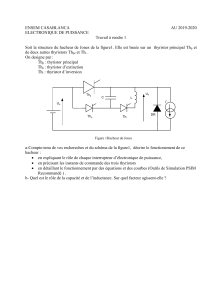
u/lirers~llt) (le NC,v1()n. Deux particules de masses
respectives ,\1 et III s'attirent mutuellement s "Ion des [orees égales J'nais
opposées, notées F et - F (ligure 1.1), dont la gl'ancJeur F ("st donnée par
lotfoduc:tion
LA
loi lU' la
grfll'iil:
la relation
(1.2)
111
où r correspond à la distance qui sépare les particules et G est la constante
grovitntinn n elle.
!If
FIgure 1.1
La loi de la zravité universelle introduit l'Idée d'action à distance: plie élargit
également le domaine d'application de la troisième loi de Newton: l'action F
et la réaction -F de la figure 1.1 sont égales et ClPP<> ées, et elles ont la
même ligne cl' action.
L'attraction exercée par la terre sur les particules localisées à. sa urface
décrit Url cas particulier mais j mportant de la lot de la gravité universelle. La
force F exercée par la terre sur La particule d6fmit le poids W de la particule.
Si wl correspond à lainasse de la terre, r est égale au rayon terrestre R. el si
nous posons
CAl
( 1.,1)
Il, = R2
la grHndeuf \\; (Ill poids d'une particule de masse ,n s'écrit2
(1.4)
La valeur exacte de R dans l'équation
1.3 dépend de l'altitude du point
considéré, Je même QUf1 de sa latitude, puisque la terre n'est ras parfaitement sphérique, Ainsi, la valeur de g varie légèrement selon le lieu où nous
nous trouvons. Cependant. les applications courantes sur l'ensemble de la
surface (lu globe ue requièrent L'lasune telle précision et IIOUS utilisons le
plus souvent g :; 9, I rn/s2 {valeur exacte: (!, :; 9, 0665 mI~).
Nous introduirons les principes énoncés précédemment à 1l1eSLIre qu'ils
seront nécessaires à la compréhension de notre étude. Ainsi, le chapitre 2.
aborde la statique ries particules en s'appuyant sur l'additivité des forces et
sur la première loi d(~Newton. LR chapitre 3 applique le principe de la transmissibilité il la statique des COlpS rigides, ct le chapitre 6 fail appel à la
troisième loi de Newton dans l'analyse des forces qu'exercent l'un sur l'autre
les éléments d'une même sI ructure. La (lE'luièrne loi de Newton et la lui de
la gravitation universelle entrent en jeu dans l'érud de la dynamique, II sera
alors démontré llue la preuiière loi {If>Newton correspond à LIll C"<lS particulier de la deuxième loi (section 12.2) pt (IHf' le principe de transrnisslbilité
découle des autres prtncipes . en conséquence, il lié sera plus nécessaire de
le conserver (section 16..5). Entre-temps, la première et la troisième lois de
Newton, l'additivité <les foreùs et If>prinCipf' (Je transmissibilité, sllffisent à
couvrir tout le domaine de la statique incluant les particules, les corps
rigides et les systèmes de corp rigides.
Ainsi qu'il il été indiqué précédemment, les six principes fondamentaux
sont établis sur (les bases expérimentales. À l'exceptton cie la première loi de
Newton et du principe de transmissibilité, ÛS sont indépendants, c'est-à-dire
que nO~IS ne pouvons les déduire mathématiquement
les uns des autres. ni à
partir d'autres principes physiques élémentaires. L'ensemble de la mécanique
newtonlenne repose Sur L"eS six principes. Depuis plus de trois siècles. leur
application a pf>nnis de résoudre un nombre impressionnant
de pl"().
blèmes relatif s à j'état dl:' fPP0:-: ou <le mouvement des ooll)S rigides. des
2..
UIIf' déf1nitiou plus rré('L~e dt: \V dc.",·rnittenir compte du mouvemen; de rotarien .Ie la terre.
Copynghted ma rial
corps déformables et des fluides. Bon nombre des solutions ohtenuex ont pu
être vérifiée exprérimcntnlcment. cc qui a confirmé la validité des principes utilisés.
Au vingtiènlc siècle. 01\ a dû faire appel;) la tltéorit' (le là relutivité pOli r
expliquer le mouvements 1\ l'échelle atornique et If>mouvement cl(_' C(Jrt.ÙIlPS
planètes, rcmcnont ainsi en cause l'universalité de la mécanique newtonienne.
Il reste cependant <jll'Ù l'échelle humaine et à celle des réalisations d'illg~nierie, 011 les vitesse demeurent relativement faibles par rapport à la vitesse
cie la lumière, la mécanique newtonienne n'a encore jalllai~ tst(~contre-dite.
1.3 SYSTÈMES O'UNITÉS
On associe les quatre
concepts
fondamentaux
pré entés il la s(:ct ion
précédente à des "'lif(~ç cluétlqur«, soit les unités dt" fOIlf!.III'/lr, dt' temp», d(,
litasse el dc force. Ces unités doivent appartenir il un système cohérent afin
que l'équation 1.1 soit valide. On définit arbitrairement trois d'entre elles ct
on les nomme unlf(("follclfll/U'lllfllt,.'i. I.:é(luatioll 1.1 détt'rlllin(~ la qnatrièm«.
qui est appelée IInilé dëricëc. Les unités cinétiques ain i étahlic Iorment un
.s1j~1&l1le cohërent (]'""llé",.
u'
Sy\t.·'UII· 1II/"/'I!nlit1Ila{ (l'ltllit(:~ 1 Uniil:" SIl. Dans cc système, la
lungut'lIr, la musse et le temps donnent les unités fOlltlallu'lll.ù(,:" soit
respectivement le mètre (n'\), 1(1kilo{!,rolUl1le (kg) t la seconde (s), déflnles
arbitrairement.
La durée de la seconde a été ûxée initiulcmcnt
la rmction
118ô 400 d'lin jour solaire moyen: on la décrit aujourd'hui plus précisément
comme étant ln durée de 9 192631 770 périodes d'une radiation émise par
l'atome de césium 133, qui corre pond à la transition entre les deux niveaux
hyperfin de son état fondamental.
On Il d'abord défini le mètre COn)J11C le dix millionième de la distunee
éparant l'équateur de l'un des pôles; plus précisément, il correspond il la
longueur du trajet I)urc()unl par la lumière dans le vide, dans lin iutr-rvulhde temps de 11299 792458 de seconde. Le kilogramme, pratiquement ('~tll
à la masse de 0,00 1 n,3 (l'eau, est maintenant défhli pnr la 111tlSSP d'un étulon
en platine iridié, slligrH'llSf"111t'ut conservé au Bureau internutional dc>spoids
el mesures, il Sèvres. près de Paris, en France.
L'unité de foree. dérivée des trois autres. s'appelle 1(.'newton (N):
î
J newton correspond l'lIa foree qui dorme une accélérutiou
lll'
1
lit/52 Ù
lin!'
masse de 1 kg (figure J .2). L:(\'luation 1.] pemlct d'écrue;
1 N = (1 kg)(l
nt/s2)
=
1 kg'ln/s2
(].5)
Les unités SI constituent un système absolu d'unités. c'est-à-dire 'llIC les
trois unités fondamentales restent indépendantes
du lieu Olt les mesures
sont prises. Autrement (lit, le 111ètTe. le kilogramme et la seconde ont la
même signiflcatioll t't la même ~ralldeur partout sur la tPITt> ou mêuu- 'IIr
une au tre planète.
Le potd« d'un corps, ou lnforee gracilatiollllelle exercée sur lui, s'exprime
en newtons comme toute le autres forces. Nous nu us !>enons d", l'équution 1.4 polir calculer If' poids d'un corps: pour une masse de 1 kg (figure 1.:3),
nous obtenons
'"g
\V =
= (1 kg)(9. 1
= 9. IN
.1.lll'~
"'_lkg
--
....-
..
F~I~
FIgure 1.2
",.Jkg
w " 9.81 N
Il)/52)
FIgure 1.3
Nous emplo 'uns aussi des multiples et des sous-multiples des unités
SI. nommés à l'aide des préfixes listés dans le tableau 1.1. En in~~nierie. nous utilisons couramment le kilomètre (km) el" le IIlillilllèlrc> (mm]
pour la longueur: le gr(/111IJIl' (g), le kilogrlll1lnlc (kg) et la tonne métrique
c
pOlIr la masse; et le kilCl'netQtol~ (kN) pour la foree. Le t·.ilileau, 1.1 donne les
éqlwlliences Slûvantes:
l km
= 1000 m
l kg = lOOOg
l b\l
Nous
<=
=
l mm
0,001 ftl
1 g ~ 0,001 kg
1000 N
en mètres, eu kilogrammes ou en newtons
selon le CMt SÏDlpiement en déplaçant: la virgule décinlaie de trois places vers
la gtluche ou vers la droite. Par œempl.e. '110US convertis ..sons 3,8:2 km eu mètres
en dépluçaat la virgule \rers Ia droite. '. OUS obeenons.
COfl\'êttiSSO'!lS
ces
l1rutés
3. .2 km = 3820
0'1
}'i:Dverse.pour exprimer en mètres la mesure de 47~ mu'}, l'lOUS. déplaçcns
la wg_lùe vers la g~\llche. Ainsi,
À
·47..21nm
=- 0.0472
rn
La rlôt'.fltion scientifique permet également d'éc.rlre:
3,82 km = 3.8.2 X l()i3lfl
47,2 n11l1 ::% 47,2 X 10-311}
Tableau 1.1 Prêftxe$ SI
= 1011\
= 1(}9
= l()fi
1 000 000 000 000
1 000 000 000
1 000 000
1000=
1()3
100== l~
10 = 101
0.1 ;;;;10-1
0,0110 lO-~
0,001 t:!I IO-"
0.000 001 "" 10,-6
0,000 000 001 = lO-~
O.(lOO000 000 001 c:> 10-1:
0,000 00000.0000 001 = 10-11>
0,000000 000 000 000 001 = IO-ta
1é\~r
oeli
tech!\[cflJ#
preftws ~uJ
<les olilfltimètrœ,
!)GUI
Préti)OOt
SymbOle
téta
T
G
gigot}
Illéga
kilo
k
hoclr>t
(lécat
Il
da
dkii
d
œntit
e
milli
,
m
1ll1Cl'O
P.
lHU!O
Tl
pioo
felnto
f
att'Q
il
les meseres d'mm cl de '\clUIl~
,,"lises pi"
)\,f
ou
CIlOOl"e pour
w,'elnple pour ffteSUIW les paru "!il du ~
l'usage !lan
01].d'llU vêœmelrt.
Ltuùté SI du temps est la seconde (s); flOUS en espnmens les multiples
et les sous-multiples à )'aide de . pr 'fixes donnés dtUlS fe tabl.G1lU1.1. t:usage
de la minuta (min), de l'heure (11), du jour (j) et de J'année (a) est égale-
ment accepté.
Les angles plats. se mesurent en radians (md) et. encore tlll:ê fois~
les préûxes du tableau 1.1 s'nppliquet\t pour les tnw.ttples et 168 5OU$multtples, Lusage du degré (0), de la tninute ('). de la seœade (") et de la
révolution3 {r} est ét-,raJement accepté,
L'enlploi npproprié des multiples et des sOW>&iÏlultiples pennet d'éviter
d'éertre des nombres réOllfb-.:ttUs {tl"ès f,t;l1lJ\ds ou très petits"). Par exemple,
flOUS choisirons d'écrite 427.2 km Rtl Ueu de 427 2{)Om, ou encore 2,16 mm
ou 2..16 x 10'~m plutêt que 0.002 16 m.
3. La nl01
toUT (tr) eiW tI.uS,fl t:!anployé.
4. I..ot!:qu·un nombre œcprimant une qUfi.lllité SI (.'(lnlpre1ld IJIu.sde quatre ehlffres d'uu c6t6 {lud:e
t'atrtl'e de la virgula dédm'iJe. un ~Xtœ ~p.'lre des gtOUJ?(tsde b,(lis clùlfn."lI; noult 6criwns. par
Cltcl'lt[lle. (27 000 tn ct o,oœ 16 ni.
Copyrighted rnaterial
LRs tlnité d'aire et de coùnne. U!S aires se mesurent enlllPtre\ ('(Irrt~ (1112),
dont l'unité correspond ik J'aire d'un carré de l III de côté. Les volumes
s'expriment eu mètres tubes (rn''), dont l'unité équivaut au volume d'un cube
de l ln Je côté, Afin d'éviter l'usage excessif de petites \'a]CIII"S, nous utilisons les sous-multiples du mètre, soit le décimètre (dm), Je centimètre (cm)
et le milltmèt re (mm). Par définition, nous avons
1 dm t = 0.1 ln == 10-1 111
1 cm = 0.01 m = 10-2 m
l mm = 0,001 III = 10-3 rn
Les unités (le surface deviennent
alors:
1 ÙI1l2t = (1 dJlI)2 = (.10-1
l CII12 == (1
1 mm!! = (J
= (10-2
111111)2= (10-3
cnl)Z
111)2
In)Z
In)2
== 10-2 1112
= lO-~1l1Z
= 10-6 ln..!
et les unités de volume s'écrivent:
J dm" = (1 dm)" = (10 1 ru)" = 10 :1 rn"
1cm" = (l (111)3 = (10-2In)3 = lO-4'lTl3
1 Innl!! = (1 n1Tl1)!!= (10-3 m)3 ;;;;;:10-U Il,3
Par ailleurs. le volume d'un Liquide s'exprime souvent en litre (L). autre
non) donné au décimètre cube (1 L = 1 d013 = 10:lcn\' = 10-·1n):'I),
Tableau 1.2
Principales unités SI utilisées en mécanique
Quantité
Nom de l'unité
Symbole
Détail de l'unité
Accélération
mètre par seconde carrée
...
lu/s2
Angle
radian
rad
l
Aecéléraëon tlnglliairt'
radian
Vitesse angulaire
par seconde carrée
radian par seconde
Aire
mètre carré
Densité
kilogrol)\JllC par mètre Cilbr
joule
11(.>\\1on
hl'rty.
Énergie
Force
Fréquence
Impulsion
Longueur
Masse
r.ldfsl
...
...
radis
.,
nl-
kgfn)"l
N'III
k~'Ill/S.!
S
1
newton -sccoude
...
mètre
III
kg
.,.
Pu i.ss3J1Cl'
kilogralllll1e
newton-mètre
\\'utl
w
**
Jf.
Pression
Contrainte
pascal
pascal
J'a
N",,::
Pa
N/IlI:::
Temps
l>l'C'()lIdl'
S
Vitesse
mètre par seconde
mètre cube
litre-
...
*""<;
L
10
jouir
J
Moment
de foree
Volume, solides
liquides
Tmvail
k~'""~
N'ln
111'1
1111)
• III
t Trà rarement uuhsëe,
:t Ul1ltjS d(lrh'jS.- (1 r(:\olillion
*
= 21T rad = J60·).
Unité de base,
Nous employons des unité dérivées pour les moments de force. It>
travail et plusie-urs autres quantités physiques: les principales sont indiquées
au tableau 1.2, Nous introduirons ces unités au moment opportun dons les
chapitres subséquents, mais précisons dès 11présent une règle lmportante :
lorsqu'on obtient une unité dérivée en divisant une unité fondamentale par
une autre, le nu mérnteur peut contenir lUI préfixe mais pas le dénomtnatcur.
1 3. Systèmes d·unl1é&
7
Par exemple. la constante k d'un ressort qui s'allonge de 20 mm
charge d-e 100 s'esprlme comme suit:
lOON
100
k = î'-O
... rnm == .•0 O·20
fil
.
= 5000 N!ru
ou
k
=5k
SOllS
une
lm
1.4 MéTHODE DE RÉSOLUTION DE PROSl:ÈMES
aborderons les problèmes de méeanlque comme si t10115 étions
devant (les Situatiol'lS réelles. En faisant appel à l'expërtence personnelle et
à 1'111tuition, il sem plus facile de comprendre le problème et de le poser
correetement, Une fOls les données clairement esposées, il n'y ti cepelldant
plus de place l)Ollr la ftmtrusie personnelle dans l'élaboration de la solutton,
Celle·cl doit 8'appuye-r .tU.1" la sb: lJrincipa ftm(loment(JllX tmonc,"(!s à Ùl
secuo« 1.2 ou encor« sur de$ théfJl'èTMS qltî en tlkouJ.ent. Ces principes
doivent justifier chaque étape de la, solution, qUE! nous obtenons de façon
quasi automattque en suivant des règles strictes, sans référence à une
approclie intuitive ou personnelle. Une fois 1'1réponse trouvée, ilest essentie] de la vérillêt> ft cette éblpe. nous pouvons (le nouveau fnlre appel au
bons SCtU ou à l'expérience. Si te résultat n'est pas satisfnisaût, OO~lS devons
nous assurer que fe problème a été pesé eOllforn1émellt aux données de
départ, que les méthodes ertlployées sont V'.al.ideset q\JI.eles calculs sont exaets,
J:ltrp()$é d'un problème doit être cla.u· et précis: nOuS devons y meatJoïltl.e)' eoutes les données et rua s les autres t'ensmgncD1entç nécessaires à
la résolution. Nous accotnpagnou' d'un Scll(~rrllî cmtlplet illusb"m..t la
sttuatîôn d'ensemble, sur lequel nous inscrivons routes les deaaées. Nou$
traçons ensuite un magrnmIl1e séparé pOtlf chacun des corps impliq\lés.
qui regroupe les forces auxquelle le .corps est $()UITÛS. Les sections 2.11
et 4.2 donnent une desertption détaillée de ce type de dJagrarnrnes. apllel~
diagl'lJul1ne des forces ou diagmmlne du corps libre (DCL).
Une fois les diagraxnmes. complétés, flOl18 uUliSD/l.'1les prlnci1}0;S j01ldllrnenJ;aux décrits il III section 1.2 pOt/f' gcrlre les éqttfJ:.ti/)r~ correspeadaat à
l'état de repos ou de mouvement des corps considérés. chaque équation
étant associée à J'un des diagrammes <les forees. Nous réSOl"'OD5 em.'tlrte le
problème en suivant strictement les règles usuelles de l'algèbre et en mserivant ehaeune des ~t.atJeS61ll1cbies .
.ou.'; vérifions attentivement la réponse obtenue. Nous pouvons ~{)Uvent détecter les errot'-rs de '(a,/..s.'Onnentel'l-t stmplement en anal)'$!:t.Ilt les
lmil'és. Par exemple, pour déterminer Temoment d'une force de 50 lN il un
point situé il 0,60 m de la ligne d'llctiC)U. nom aurions écrit (section 3.12):
OtJS
~[ """ Fd = (50 )(0,60 m) = 30 N . m
L'unité N· m r~sultaut de la ,nulli.plication des newtons par les mètres
eorrespond bien à. l'unité d'un moment de foree t si nQUS avions obtC11U une
unité différ-ente, nOlIS aurions su ÎDlnléd:iatement que la solndon cornptir·
t.Qit une
erreur,
Nous trouvons facilement une erretif' de clilc~J.len substituant les vrueUJ."S
numériques obtenues clans une équation q1:.1i 0'9 pas été utilisée J?O'llf $olu·
tionner le problème. Les valeurs <ÎeVl'aiellt normalement vérifier f'équat.iOt'l.
Nous n'insisterons jamais asses sur l'impor'mo.ce de l'exaetaude des résultats
pOUT un ingénieur.
Copyrighted rnaterial
•
1.5 Précision des
1.5 PRECISION OES VAL'EURS
wJl!lXS
9
L9 précision dt' ln réponse à un probl me dépend li ln fois dp la précision
des données de dépr rt ct de celle (les calculs effectués. La réponse ne peut
être plus précise cluC le moins précis de ces deux facteur. Considérons par
exemple If' C3 d'un 110nt qui supporte une charge de 40 000 kg. déterminée
ft 50 kg près: l'erreur relative indi(lue 1:1précision de cette donnée.
50 kg
-_....!..:..._
.j0 000 kg
".,
0,00 125 = 0.1,).5 pour cent
Si nou caleulons Ifi réaction d'appui de l'un des pilier: du pont, il devient
incohérent d'iuscrtre 253,42 k J car une telle précision ne peut être g'arantie.
La précision ùe la sclution ne peut dépasser celle de la donnée de départ.
soit O.]25 %. quel tjll(' soit le nombre de décimales obtenues par calcul. En
réalité, l'erreur pt:\ II, (>lre aussi grande que (0,125/100)(253.42 k ) = 0,10 kN.
La rëpon 'e Jevriut donc être inscrite comme suit: (2-53,4 ~ 0,3) kl ,
L'ingélljE'ur (1~spo.."erarement (le données de précision supérieure à
0,2 pour cent. En eonséquenee. nous devnons noter les réponses alt.Mpro.
blêmes avec une l)n~(:isi(Jnsi111ilaire. Pour simpliûer, OOI1S conservons en
gén6ral quatre chilfJ1 S dans l'écriture des nombres commençant par ,( 1. », et
trois chiffres dans tous les autres cas. Par ailleurs, à moins d'indlenriou
contraire. nous altribuons la même préci ion aux donnée de départ d'un
problème. Pur exemple, 'Jl procédant comme précédemment, tille force
de 40 l s'écrirait 4-0.(1 i et une force de 15 N deviendrait 15,00 .
Les illg61,if'ur:. (,t les étudiants utilisent aujourd'hui couramment les
calculettes. La \ itesse d'cxécutfon el 1:' précision des calculettes facililèolln
résolution numérique (le bon nombre de problèmes. Cependant. les utilisateurs ne doivent pa .. retenir tous les chiffres affichés mais plutôt choisir le
nombre app ..oprié df' chiffre sig,uAcatifs. Ainsi qu'il a (léjà été indiqué, une
précision supérieure à 0,2 pour cent est rarement nécessaire ni même
significative dans les problèmes pratiques rencontrés en ingénierie.
A
•
•
\
Copynghted rnatena
La statique des particules
On peut résoudre bon nombra de .problèmes concrets en coNidéranl
l'équilibre CSesIol'Cft en un poInl d'une stNCIut8 que 1'0f'I ASSimile à une
..plltloule .., La phoCo monlte le chargement d'lM COf'Itenoorsur un navire.
1:analyse· de l'équilibre fll'emplacemenl du C1OChe1 qui retlén' les cAblés
sutlit pour obtenir une relation mathématique entre les tenslOf'ls CSetous
Ie$ cAbI. utiliSés.
2.1 INTRODUCT10N
Ce chapitre traite de l'effet prodoü par (les forces exercées sur des particules. D'abord, nous apprendrons à remplacer un. ensemble de d.eu.'tou plusieurs forces appliquées fi une particule par une force unique équi~./3jellte.
appelée résul.tlU~te. Puis, nous dériverons les espressions lllath"éu'lutiqll€S
reliant les forces agissant !lItt une partlcule en &pt/libre; nous les utiliserons
par la ~'11Îtepour détenniner quelques-unes des forces en cause.
Bien qu'il soit quesdon de «particuJe 1>. notre éttl(ie '0,ese Jjnrite pas eux
corpuscules ou aux trës petits objets, Simplement, elle examine des cas ob
la :t:3illeet 1n forme des corps tl'influencent pM les résultats et où les forces
s'a:ppliqu.ent il un même point. On rencontre ces ronditiOflS dans hon nombre
de sjtuations concrètes. La madère œntenue dans ce chapitre permettra donc
de résoudre de réels problèmes, <)1ngétûerie.
En première partie, nous analys.erorn des cas où toutes les forœs se
situent dans U11 même plan, la secoede partie portera sur des ensembles de
forces aglssru1t dans IUl ~œ triflirnensl(lnneJ.
FORCES COPlANA1RES
2.2 RItsULTANTE De caux FOA;CESAGlSSANT
SUR LA MI!Me PARTICULE
Une force rei?:~'ënte l'a;ction .d'l.Ul oorp~ "" un autre corps et est gén~ement caractérisée par 80.0 po-mt d'appllmtloo. sa grandeur et sa direct1on.
Cepenclant, les. forces ~lgissant 'ur url€: fllirtieule dOlluée ont le même lXJint
d'application. soit la particule elle-même. Ce chulJitre ét."Ult consacré am
particules, nOlISdéfulirons complètement les forces en donnant leur grandeur
et leur direction.
La grandeur d'une farce s'exprim.e à !'a}(le d'un nombre et de ses lJnités.
Nous avons vu au premier clllipitre ç}tteles ingénieurs clnll1oiOOlt les unités SI,
It.. mesurent cloue les forces en newtons (N) ou en kilone\.vtons (kN), lm
ldloncVY1:on étant égal à 1000 .. Pour compléter la description de ta force.
on denue sa clirectioll en indiquant sa.lig'le d'uction et le Sfm8 d'appJiœtion.
La li{,rned' action correspond à ia Ugne droite tnftnie le Jong de laquelle la
foree agit: on la caractérise à: l'aide de t'angle qu'clle forme avec u:n axe
préaJablement déterminé (figure 2.1). On desstne un segment de cette droite
porur représenter ta force; la longueur du segrnent, fol:letion de l'éche:lle
choisle,. correspond à la grandeur de ln force. Finalement, une flèc.he indique
le sens d'application (011 orientation), précision essentielle dUXlS l.a des(..'tiptiOJl d'W1C force. En rénltté, deux forces de même grandeur exercëes sur
la même ligne d'accon, m.ais (le sens opposé (figures 2.la et 2.lb). ont un
effet contraire sur la perdeule.
(6)
(1))
Agure 2.1
qtl.ê nous pouvons remplacer deux forces f et Q
agL..sant sur une particule A (Bgur:e 2.2<1) par u:tI,eforce uelqne B produisant
le même effet (figure 2.2c). On nomme cette ferce éqW\'tlLente r&ultttJf.te
des forees P et Q. NOliS pO'uvons déténniner ft en construisant un parellëIQgramme dont les côtés oojnœnt:s correspondent à P et Q (figure 2.2b). I.,[J
L'expérience dt:mol~
Copyrighted rnaterial
passe par le lJO;/l1 A représente la rësultante. Cc procédé décrit l'application de la rè{!.le du p(/ralle1()gr1l1n11lI à
l'addition de deux forces. Fondée sur des résultats expérimentaux. cette règle
ne peut f>tre IIi prouvée ni d~ri\'ée mathématiquement.
(liogollll!e
(III IJ(lrallfl(){!.rnlll1lll'
qui
2.4 Addlion ~rc·rle'IB
J
2.3 VECTEURS
L'addition géométrique de la figure 2.2 indique clairement <lue les forces
Il'olJéi sent pas aux règles d'addition de l'arithmétique ou de l'algèbre
ordinaire. Par exemple, dt>s force de 4 1 et 3 • faisant un angle droit entre
elles donnent une résultante clt' 5 :X, et lIon pas de ï 1 • L'application de la
règle du parallélogramme ne C limit . pas aux forces; elle permet d'additionner d'autres quantités physiques. également caractérisées par une grandeur et une direction, tel, les déplacements. le citesse . les accélérations et
les moments (leforce. On représente toutes ces quantités pur des cecteurs. Par
ailleurs, nous appelons scalaires Ics quantités sans direction, parfaitement
J~flnies par 1111 nombre et ses unités, tels le colume, la masse ou l'énergie.
011 dl'finit los vecteurs comme des expressions IIlllthé,I1(JfiqllCS caractérisées lJ(lr ""e grall(/clI,. ct une direction, qui s'oddiuonneut en Ilppliqllll"t
III
règle (III lJflr,II'It/ogrll,nlllt'. Sur 1111 schéma, on repré-sente un vecteur par UDe
flèche ct, dans le texte. on les distingue des scalaires en utilisant les caractères
gras (P). O.U1S l'écriture manuscrite, on identifie génél''éll~nlcnt un vecteur
en traçant une (>élit(, f1('c...he au-dessus <)(' son symbole (P) ou en le soulignant (f). Cette demièr ' notation est sans doute préférable car on peut la
reproduire plus facilement sur une machine à écrire ou un ordinateur. La
grandeur d'un vecteur détermine la 10llgueur de la nèchf> qui le repré ente.
Dans ce texte, on exprime cette grandeur en utilisant un caractèr .."> italique;
ainsi. P repré cnte la grandeur du vecteur P.
Le point d'application d'une force agissant sur une particule est la particule elle-même. Nous parlons alors d'un vecteur lié que nou ne pouvons
déplacer san modifier les conditions du problème. Par contre, nous pou·
vons déplacer librement dans l'espace les vecteurs de certaines quantités
physiques, les couples (chapitre 3) par exernple : nous parlons alors de
vecteurs libre ,Dan d'autres cas, comme les forces agissant sur un corps
rigide (chapitre 3), nous pouvons glisser les vecteurs le long de leur Ligne
i\
(a)
"
H "
A
"
"
Q
"
"
"
(hl
A
(cl
Figure 2.2
d'uction : nous les uonuuons vecteurs {!.ii.'iSIII.fs'.
Deux vecteurs sont équtpollent« s'Us ont la même grandeur et la même
direction, quel (lue soit leur point J'application (fi 'ure 2.4). On peut identifier des vecteurs équipollents par le même symbole.
Le cecteur n]J]José à p. noté - P, a la même grandeur (lUf' P mais il est
Je sens opposé (fig" re 2.5). Nous disons alors 'llle les vecteurs P ct - P sont
opposés. Leur S0l11meest nulle:
P
+ (-P)
Figure 2..4
=0
2.4 ADDITION VECTORIELLE
Dans la section précédente, nous avons Vl.I que. par définition, la règle
du llarallélogranlllle s'applique polir additionner les vecteurs: nous obtenons
la S0I111ne dt' vecteur P et Q en joignant leur origine à un point i\ et en
construisant tin parallélogramme dont les vecteurs constituent d ux des
côtés (figure 2.6). La dingonelc passant par le point A détermine ln somme
des vecteurs P et Q, notée P + Q. L'utilisation {lu signt' + à la fois pour les
-p
Agure 2.5
_-
1
1
1
1
1
1. Cert.ùut'!. '1lllllllUés '(,':\pnllll'Ill tlr,dûe d'une grllutl :ur et d'une din."t.1ion Slins loutt.'fois s',Kkli·
l' -
tiullilcr ~t'Iulllij ri'Jtll' du 1)'IJ1JJ~lo~I'UlI11IlC. ~OWi utilisous aussi des OècJIC'SpoliT les représenter
IIUIIs (!C$
n~dc IIlUbtrClIt ce gt'tll'C de COLS.À titre d'e·",..,IIJJlt·. plueez Ull
livre fcnl1~sur une' tahle' dr'v\lnt vous, <lans III positionldJîhJell e, à l'('nclr!li~,I(·hord n'Iip du c;()t~
l'lHl1~
o
Il
/
quantités ne ~O,,111(1·~des vecteurs.
Le) rocatlo,,~Illlit'~d'un
1
Q
Figure 2.6
13
14
La SlllliQuc dus plI! tlCU:C$
scalaires et les vecteurs ne pose pas de problème à condition de distinguer
clairement J'écriture des vecteurs de celle des scalaires. Il est à noter que la
grandeur du vecteur P + Q Ile correspond généraJement pas à la somme
des grandeurs des vecteurs individuels P + Q.
Le purallélogramme construit à partir des vecteurs P et Q reste le
même si nous plaçons les vecteurs dans J'ordre inverse. L'addition de deux
vecteurs est dune rommutatioe et f101lS pouvons écrire
P+Q=Q+P
(2.1)
La règle du parallélogramme permet de dériver une autre façon d'additionner deux vecteurs, que nous appelons la 11t1!thodedu triangle. La figure 2.6
montre la somme des vecteurs P et Q obtenue par la règle du parallélograolrnc. Considérant la symétrie de la figure. les côtés opposés étant égaux
et parallèles, il suffit de dessiner la moitié du parallélogramme (Bgure 2.7a)
l)our trouver la somme : Orl place bout à bout les oecteurs P et Q, l'origine
de Qjointe à l'earëmuë de P; on trace ensuite la résultante en reliant ['origine
de P il l'extrémité (le Q. La flgure 2.7b illustre la même addition en consi(térant l'autre moitié du parallélogramme. On obtient la même résultante,
ce qui confirme la commutativité de l'addition vectorielle.
La soustraction (l'UII vecteur équivaut à l'addition de son vecteur opposé.
Ainsi, nous obtenons P - Q. la différence entre les vecteurs P et Q, en additionnant P et -Q (figure 2.8). Nous écrivons
Q
P - Q = P + (-Q)
A
(2.2)
lei encore, il f'lut éviter toute confusion entre les soustractions scalaires et
vectorielles en distinguant clairement récriture des vecteurs de celle des
(0 )
scalaires.
A
Considérons maintenant l'addition de trois vecteurs ou pius, Par définition, nous obtenons la somme de P, Q et S en additionnant d'abord les
vecteurs P et Q, el en ajoutant ensuite S au vecteur P + Q. Nous écrivons
(b)
Figure 2.7
P + Q + S ~ (P + Q) + S
(2,3)
L'addition de quatre vecteurs se fait de même, c'est-à-dire en ajoutant le
quatrième vecteur lu somme des trois premiers. Il s'ensuit que la somme
à
..Q
2
(0 )
Apre 2.8
(b)
gIlucb{!.Tournez-le de IbO" autour d'un axe panillèlc au bord rellé (Agurc 2.30);
011
représente
eeue "lt.\tll)H 1)lU' une fift:ht' dl.' IOllg\lellr ~lUI\".t1clllei'l LOO umtés ct orieutëo œmme sur la
lignw, PrPIIf>ZInrulltpnalllip livre dans ct>Ut>position et tcuruez-le dt' L8O", eeue foh autour d'Url
ru:e horiZlOlllml1Prpendiculnire au bord ",titi (ligUA> 2.3/1): 'LfW nk!lu' de 180 HOUés dJrlgéu \'erS
la droite désigne cette seconde rotation. Or. le Livreauralt pu lJa.S.krde la position de départ à III
posilloli Ii""lc- en un.' <;eul" rutlll10n dt- It-IO" OIlillIlIr d'un LW: \~rhall (îlgUTC 2,3c). Nous »OU\'Ol15
Cil dtduirl" que la somme Je·s rlc'ux r<Mation$symbcltsëes {>llrle flèches orientées le long des ~>$
;; et x correspoud il. une rotlltiO(l de l O~autour de l'aw des y {tlgure 2.3d). La ~Ie du pamllé.
logmnllne ne ll':lpplique ptl.S Ici. eu eouséqeeuce. nous ne pouoons représenter la rotation d'un
C()rp~rigide
par un vecteur,
(n)
FIgure 2.3
(]J)
Botauons finies d'un corps rigide
Copynghted ma rial
d'un nombre donné de vecteurs s'obtient en appliquant la règle du purallélogramme il répétition, ajoutant un vecteur chaque fois, jllS'1I1'~1 ce (Ju'un seul
vecteur remplace l'ensemble des vecteurs à additionner.
Si les vecteurs sont coplonaires, c'e t-à-dire s'ils se situent tous dans le
même plan, on trouve facilement leur somme par une méthode gr.1pltiquc.
La méthode du triangle 'avère alors plus imple d'utilisation lJUC la règle
du parallélogramme. La fibrure 2,9 illustre l'addition de' vecteurs P, Q et S
pRr la méthode clu triangle. Il suffit d'additionner les vecteurs P pt Q en
première étape, C't de répéter la méthode pOllf les vecteurs P + Q et S.
L'examen de la figure 2,10 révèle qu'il n'est cependant pas nécessaire de
déterminer le vecteur P + Q po11r obtenir le résultat fînnl. Tl suffit de placer
les vecteurs bout à bout. joignant l'origine du deuxième à l'extrémité du
premier et ainsi de suite, el de tracer la résultante en reliant l'o0l-,titl(-'du
premier vecteur à l'extrémité du dernier: c'e t la méthode dit J)O/Yf!.Olll'. Le
résultat re te le même -i nous changeons l'ordre des vecteurs, tel qlle
montré sur la figllre 2.11, oi) les vecteurs Q et S ont {-té rf>lllplactSs par leur
somme Q + S, NOLIS pouvons donc écrire
P
+ Q + S = (P + Q) + S = P + (Q + S)
2.5 Rést..ltanll? de '·:lrces conc;owant.M
A
Figure 2.9
1\
Figure 2.10
(2,4)
Cette équation montre que l'addition vectorielle est a ociaticc, CI): plus d'être
commutative comme IIOIIS l'avons vu précédemme-nt. l'\ous avons
P
+ Q + S = (P + Q) + S = S + (P + Q)
= S + (Q + P) = S + Q + P
(2,5)
A
Cette expression et les relations équivalentes que nous po\l\-ons déduire de
la même manière montrent tfllE> l'ordre d'addition des veete Il rs est sans
importance (figure 2.12),
Produit d'fIn scalaire e! d'utl recteur. Pour simplifier la notation,
nous écrivons souvent 2P pour repré enter la somme P + P. ou 3P au lieu
de p + P + P, En fait, nous remplaçons g~n~ralellient la SOIIlIlI(;' de n
vecteurs P égaux par 1(>produit "P, où Il est lin entier positif. U" vecteur Il P
est de grondeur PlP et orienté dans )0 même direction Clue P. 'ous l)ouvons
élargir cette défi nition L'a tous les scaluire-s et, reprenant lu notion de vecteur
opposé vue il la section 2.3. le produit kP d'un scalaire k ct d'un vecteur P
donne un vecteur de même direction que P si k est p()Sitif, t"t un vecteur de
sens opposé CI.P si k est n6gatif. La grandeur du vecteur kP correspond nu
produit de P par la valeur absolue d k (figure 2.1.3),
Agu,. 2.11
,,\
Agure 2.12
2.5 RÉSULTANTE DE FORCES CONCOURANTES
Considérons une particule A . oumise à plusieurs forces coplannin-s, c'("stà-dire situées dans un même plan (figure 2,1-10), Étant donné que toutes
ces forces passent par le point A. nou dirons qu'elles sont concourantes.
Nous les addition nons ('11 utilisant la méthode du r()ly~()nt> (flg1lrf' 2,1":1/).
!II
-
-
1S0.
1
l'
1
(,. )
tri)
Agure 2.13
15
16
équivalente à des applications successives de la règle du parallélogramme.
La résultante R des forces concourantes produit le même effet sur la particule A que l'ensemble des forces concourantes appliquées. Rappelons que
l'ordre d'addition des vecteurs P. Q et S est sans importance.
La slallQuo dos palUeu es
;'
;'
s
;'
;'
;'
;'
p
A
(II)
;'
;'
rb'
ln)
(h)
Flgur. 2.14
'\
'\
\
\
'\
\
\
'\
,
1 (')
FIgure 2.15
2.6 DÉCOMPOSITION D'UN VECTEUR FORC'E
ous avons vu qu'il est possible de remplacer deux ou plusieurs forces
agissant sur une particule par leur résultante, une force unique produisant
Je même effet qlle l'ensemble. À l'inverse, 11011S P(}\lVO)l$ remplacer une
force F appliquée à une particule 1lar deux ou plusieurs forces dont l'action
globale produira le même effet que F sur la particule. ous parlons alors des
composantes de tél force initiale F et nous les obtenons en (lt!co,n1JOSn"t le
vecteur F.
Un vecteur F donné peut être> décomposé de mille pt une façons. En pratique. les ensembles (le deux composantes P (.1. Q sont les plus intéressants
mais Je nombre de possibilités reste illinlité (flgtu'f' 2.J 5). NOliS retiendrons
ici deux cas intéressants ;
A
Figure 2.16
\ ... .......
...
.....
()
Figure 2.17
' ..............
1. L'une des composantes, P, est COll 1111('. NOliS devons déterminer la
seconde c"Olnpo '<lnte, Q. en appliquant la méthode {lu triangle,
c'est-il-dire en plaçant l'origille du vecteur P sur celle du vecteur F
(figure 2.16); nous obtenons alors la grandeur ct la direction du
vecteur Q ell les mesurant sur le schéma dessiné à j'échelle ou en
utilisant la trigonométrie. J ous pouvons ensuite déplacer la cumpo~
sante Q pour illustrer que les vecteurs Pet Q s'appliquent tous deux
à la particule A.
2. La ligne d'action de chacune des composantes est conftue. La règle
(lu parallélogramme dOUI\l' la grandeur et le sens des composantes j
il s'agit de projeter l'extrémité du vecteur F en abaissant des
droites parallèles aux librnesd'action {figure 2..J ï), délimitant ainsi Je
parallélogramme, Il suffit ensuite de définir les composantes P ct Q
en les mesurant sur le graphique ou en appliquant la loi des sinus
(tngonom étric).
En pratique, nous rencontrons toutes sortes de situations; par exemple,
nous connaissons la direction de l'une des composantes E"t IlOUS cherchons
une seconde composante aUS3i petite que possible (problème résolu PR-2.2).
Dans tous les cas. nous traçons le triangle ou le parallélogramme qui satisfait
les conditions données.
Copynghted matenal
PROBLÈME RÉS'OLU 2.1
Calculez la résultante des forces P et Q appliquées au boulon A,
SOLUTION
JI
Solution graphique,
On choisit une échelle de forces et 011 ooastruit le parallélogralllnle qui a P et Q comme côtés. La grandeur et l'onentation de la résultante
1{ sont mesurées li l'échelle sur le tracé; on trouve
La ri-gle du tri~mgl€' peut aussi être utilisée: on place alors les vecteurs P et Q
bout 11bout et on mesure sur le dessin la grandeur et l'orientation de la résultante R.
A
a= 3,50
Solutîon trigOtll)lnél.'i(!\.le. La règle dl! triangle est utilisée: dans ce triangle.
on connan les deux côté cl l'angle qu'ils déterminent. On applique la loi des cosinus
loi
on oLt ien t
R2
:;;:;p2
+ Q2 - 2PQ cos B
R"J. :: (40 N)z + (60 N)2 - 2(40 N)(60 N) cos 1550
Il = 97,73 N
En utilisant la loi du inus.
in A
Q
(\ll(:'u];llri< C'
-
peul maintenant écrire
011
sin B
R
sin A
sin 155°
60N
97,73N
(1)
(·Ic·tlrnllÎqlll' Si on résout l'équation l en fonction du sin A. on trouve
.
(60 N) sin 155°
sUlA =
9773
, N
En calculant d'abord le quotient du membre de droite et ensuite
on obtient
Rt(!le- li ('ak'lll
SOD
arcsin,
En posant sin 1550 = sin 25" et en ajustant la règle suivant
le schéma ci-contre, on peut lire A :;; 150,0 ct obtenir les mêmes réponses que
précédemment.
R = !Ji i J\ d,)5,O
,\lItl'(' \"luNon.
On construit le triangle rectangle
-4
BCD ct on a
CD = (60 N) sin 25° "" 25,36 N
BD = (60 N) cos 250 = 54,38 N
)\Ior:o, par It' lri(lnglc' I\CD,
A
QI)
obtient
25.36 N
tan A ::: 9-1.38 N
R = 25,36
sin 1\
R ." 97,73 N
f~= Hi,ï N .~.'}5.(I°
17
PROBLÈME RÉSOLU 2.2
Un chaland est tiré par deux remorqueurs. Si la résultante des deux forces exercées
par les remorqueurs est de 5000 N et d[l;gée parallèlement à l'axe du chaland,
~.
IIIJ
8 ~.
..........,._.......""""""~i'!
déterrninez :
Il J la tension dans chaque câble pour cr = 4,50 ;
/,' Lnvaleur de cr pour laquelle la tension dans le câble 2 est minimale.
SOLUTION
Ten ...ion pOUl o = ..:; , "10/111;(" :!rflj)],itl"f _ Si on utilise la règle du
parall~logrtlllllll(" la diagonale (résultante) doit l!lrf' égale li 5000 N ct dirigée vers
la droite (voir lu figure ci-contre). Les côtés sont tracés parallèlement au.x câbles. Si
le dcsstn CS! rait à l'échelle, on trouve
a'
\.
\.
-..."'1:-"
30· ;,CI(lO ,
\.
\.
fj
Il
1
En utilisant la méthode du triangle, on reDlarque
"'0/111101 Il'f{oIlOlllcr'I'I"f.
que celui-ci représente
37!HI ~
la molné du paraIl6Iogmm'TI(' précédent
(voir la figure ci-
contre). Par tngonométrie, on a
T..
-
sin 45°
5000N
sin 105°
fi 1111
5llOO t\
(t
pour 1 HIlll'II(' 1. ,·,t JIIIIIII Hile. La méthode du tria.ngle est
utilisée pour calculer la valeur de cr. Le schéma ci-contre rnontre que la droite 1-1'
correspond à la direction connue de TI' De.s directions possibles dl' T2 sont indiquées
par les droites 2-2'. On remarque que T~a une valeur mialmale lorsqu'elle est
perpendlculaire 1'1 TI, On a alors
,,'
\
Ill'UI-
rI(·
H
Tz
Les valeurs correspondantes
n
"
t
:!
-
\ 1
',II
")()OO :-.
, ~I
\
1l ,
1 \
1
-
1
1
,
>,
\
1
,
/
l '"
4/
'"
,
'-<._/
»"
\
1
1/ 1
/
\
/
,
):/
\
,
/""
-,
.,
\
-
"
•
,'jIMM)
18
N
..
., "
/"
'"
"
""l'
=
(5000 N) sin 30°
= 2500
de TI et cr sont:
TI = (5000 N) COS 30° = 4330 N
cr = 90° - 30"
N
,
RECAPITULATION
"
SECTIONS
2.1 A 2.6
Nous avons étudié aux sections précédentes la règle du parallélogramme appliquée
à l'addition de vecteurs. Pour cela, deux problèmes résolus ont été présentés: PR-2.1
et PR-2.2. Le premier traitait la manière de calculer la résultante R de deux forces
connues en direction et en magnitude. Le deuxième traitait la façon de décomposer une
force F en deux composantes selon des directions désirées,
Nous allons maintenant résoudre des problèmes ayant comme point commun l'appllcation
directe de la règle du parallélogramme.
Nous suivrons les étapes suivantes:
Identifier
1('1f[ore ('II 1II','litIUé(' ....el 1" "t'IIII/Iall/(
11 est souvent utile d'écrire
l'équation vectorielle identifiant la relation entre les forces. Ainsi, au problème résolu
PR-2.1, nous avions
L,
R=P+Q
n est
important de garder cette relation à l'esprit lors de la formulation de la deuxième
partie de la solution.
2,
TTUC('r un l'Clrallrlflj!rt'/III1I('
U!/U/I' ("'/1111/('
el (raCCT la ,.('""lllllll(
(/1 (/U/!.!/IIIIIIC'
({r!!.""(' :?
('(lII'N
(1(1'(1('('/1''1
1(·
f Ire C',. (11",//(1""('"
:? J. En utilisant la méthode du triangle,
nous pouvons tracer bout à bout les deux forces appliquées, Nous pouvons ensuite tracer
la résultante en reliant l'origine de la première force et l'extrémité de la dernière force
appliquée (figure 2,7).
3, ',I,lill,tllr 1"'IIHI',II/,I" (les J'l' ,.OUI(o/ ",'H, Si 'nous utilisons un des triangles du paralJélogramJne ou encore le triangle tracé selon la méthode du triangle. 110US devons indiquer
toutes les dimensions connues, incluant les côtés et les angles. Ensuite, nous devons
déterminer les valeurs manquantes, soit la grandeur et la direction de chaque force, par la
méthode graphique ou par trigonométrie. Si nous utilisons la trigonométrie et que nous
connaissons deux côtés adjacents et l'angle compris entre ces deux côtés, nous devons
d'abord appliquer la loi des cosinus (PR-2.1). Par contre, si nous connaissons tous les angles
du triangle et W1 seul côté, nous appliquons alors la loi des sinus (PR-2.2).
Certaines personnes ayant déjà été introduites à des notions de mécanique préféreront
ignorer les techniques de résolution présentées dans cette section au profit d'une approche
utilisant la décomposition rectangulai:re des forces. Bien que cette dernière approche soit
importante et qu'elle sera présentée à la prochaine section, il est important à ce stade de
l'étude de bien maîtriser la règle du parallélogramme, car eUe simplifie la solution d'un
grand nombre de problèmes.
19
B
2kN
Figure P2.1
D eux forces sont apphquées HU point 8 de la poutre AB ci-contre.
(1)
En utilisant la règle du parallélogramme. déterminez la grandeur
clin direction de leur résultante.
2.1
Déterminez les mêmes paramètres (grandf'llf et direction) en utilisarlt la méthode du triùngl(".
IJ}
2.2 Dcuxforces (P ct Q) sont appliquées au point 11 du crochet ci-contre.
Sachant que P = 75 N f>t Q = 12,5N. déterminez graphiquement la grandeur
et la direction de leur résultante en utili 'ont u) la règle du parallélogramme
ct b) la méthode du triangle,
Deux forees (P et Q) sont Uilplic fllée,~ail point A du crochet ci-contre.
Sachant que P = 60:'l et Q = 25 N, déterminez graphiquement la grandeur
alla direction de leur résultante en utili ant a) hl règle du parallélogramme
et b) la méthode du triangle.
2.3
Q
l'
Rgure P2.2 - P2.3 et P2.10
2.4 Les câbles L\B et Jill soutiennent la poutre ,le'. Sachant que les
tensions dans les câbles sont respectivement Je 1200 N pour AB et Je ·400 N
pour AD, dérenninez graphicl'lenlent
la gt:'dndt"lIr et la direction de leur
résultante au point L\, en utilisant a) la l"èglc du parallélogramme el b) la
méthode du triurlgle.
,
/
a
10111
2,jl0N
8
1t-.--8In---f--ôm-.l
Agure P2.4
fi'
Figure P2.S - P2.6
2.5 On veut décomposer une force de 200 N en deux composantes
ayant les directions déâIlie!> a-a' et /1-/1'. a} CalCIlIe7. par trigonométrtc
l'angle Q, sachant {ille la (;(>Iuposante selon l'axe a-a' est de 150 N, b) Quelle
Serait lu valeur correspondante se-lon l'axo 1)-1-,' r
011 veut décomposer une fore de Z<)O N Cil Jeux composante
ayant les directions définies a-a' et b-b', a) Calculez par trigonométrie
l'angle a, sachant que la composante selon l'axe b-b' est de 120 N, b) Quelle
serait la valeur correspondante selon l'axe (1-0' ?
2.6
20
2.7 Un câble téléphonique
e -t attaché au point A du poteau AB.
Sachant que la l msion au côté gauche du câble est (J~Tl = 00 N, déterminez par tngouométrtc.
CI)
la tension T2 requise au t'Ôté droit si la résultante R des f()rct'~
exercées sur le <.:âblt'UII poillt A doit être verticale:
Il) ln grandeur co rrespondante de R.
21
Problèmes
....t...... ."..-.-.TI
2.8
n câble téléphonique
est attaché au poinl ,\ du poteau ,\B.
Sachant que la tension au côté droit du câble est d T2 = 1(>00 :'\1. déterminez
-
T.
par trigollolnélril';
la tension TI requi ..(' (1\1 côté gauche si la résultante R <les force ...
exercées sur le câble au point ,\ doit être verticale:
1,) la grandeur correspondante <le R.
a)
On Ilppli(lllC' sur un crochet deux forces distinctes, Sachant (lue la
grandeur de la force P 'st de 3.5 1\, déterminez par tngono III étrie :
a) la valeur de l'angle cr si la résultante R des deux forces doit être
2.9
horizontale:
b} la wallc!(:'lIr eorresponrlante
Figure P2.7 - P2.8
de R.
50N
p
Figure P2.9
2.10 En' ous référant à la situation décrite au problème 2.2 ('1 sachant
que la force P exercée pst de ï5 ~, déterminez par tri~nnom(>trif':
a]
la gr.llldt'ur de la forCi:> Q l)i la résultante R Ùf>S deux forees
al)pIiCJ11~t>Sau point A doit être verticale:
b)
la grandeur correspondante
de R.
2.11 On dtssire déposer un ré .ervoir en acier
quI" a = zoo, calculez par trigollonlétric:
a)
la gJ"lInUl'l1r (1(·la force Pila
dtU1S
un fossé. Sachant
résultante R de deux
forces
appli-
p
quées au point A doit être verticale :
1,) la grandeur correspondante de R.
2.12
On c.l~~ir(>déposer
III)
réservoir
("Il
acier dans un [ossP. Sachant
(]lIe la Iorce P (·~tdt:>5()() 1 • calculez paf tngonométrie
:
a) la valeur de l'angle a si la résultante R de deux forces appliquées
au poi nt i\ doit être \ crticale :
b) la grancl(~lIr correspondante dt' R.
2.13 On désire déposer un réservoir en acier (lans un rossé. Calculez
par lrigonolnétrie:
(1) la grandeur et la direction de la force P minimale !>our laquelle
la rë ultante R dt·~ deux forces applrquëes au point .-\ l' l \ erticule :
,))
la gr~ul(l(!lIr correspondante
2.14 En vous rrf('ranl
trigonométrie:
:lILX
de R.
donnée
du problème 2.9, évaluez par
la grandeur ct la direction de la force P rninlrnalc I)our laquelle
la résultuntc R des deux forces appliquées sur le crochet est horizon laie ;
h) la ~raJlt1ellr correspondante de R.
a)
2.15
R6solvC'z trigonolnétri(luCTllent
le problème 2.3,
Figure P2.11 - P2.13
22
La statique des particutes
2.16
Résolvez trigonométriquement
Je problème 2.4.
2.17 En vous référant à la situation décrite au problème 2.9 et sachant
(lue P = 15 N et a ;:;5O évaluez par trigonométrie la &rrandeur et la direction de la résultante des deux forces appliquées sur le crochet.
D
,
2.18
40" -
Résolvez trigouométriquerncnt
le problème 2.1.
2.19 Les barre' A et B d'uné structure métallique sont boulonnées au
gousset tel qu'illustré. Sachant qu'elles sont soumlses à des forces en
eornpresslon de 15 kN l)Our la barre A ct de 10 lu,," pour la barre B. calculez
par trigono,nétrle la grandeur et la direction de La résultante B des forœs
appliquées sur le gousset.
;" . 20',
1
1
1
1
Les barres /\ et B d'une structure métallique sont boulonnée.') au
~ouSSPl tPI qu'illustré. Sachant qu'elles sont soumises à des forces en
compression df' 10 kN (XUlr la barre A et lie 15 k pour la barre B, calculez
par trigonométrte la grandeur et la direction de la résultante R des forces
appliquées sur le gousset.
2.20
Agur.
P2.19 - P2.20
2.7 COMPOSANTES RECTANGULAIRES D'UNE FORCE
ET VECTEURS UNJTAIRES2
Là résolution (le plusieurs problèmes est hahltuellement simplifiée si on
décompose les forces en deux composantes perpendiculaires entre elles, La
ngure 2.18 montre la décomposition d'un vecteur F en ses composantes Fx.
le Joug de l'axe clet; x, el' FIl' orientée selon l'axe des y. Le parallélogramme
devient alors un rectangle et les composantes F.\' et F!I sont appelées
composantes recfangulaires,
----------
'J
_
__-
_ _
- --
,,
\
\~
.Fy
01
0\
r
F1
Figure 2.18
Figure 2.19
IJ
.,'
~GI";mdeUr ~ 1
1
Flgu,", 2.20
F,
.r
LQ.'I':edes x correspond généralement à une direction horizontale, et l'axe
cJe~
.. y à une direction verticale (Agure 2.18), mais il est aussi possible de
choisir des directions perpendiculaires quelconques (figure 2.19). Pour
déterminer tes composantes rectangulaires d'une force (figures 2.18 et 2.J.9),
il s'avère plus prudent do I)enscl' à tracer des lîgne.s parallèle» aux axes x et Ij
plutôt ljUt" de songer à abaisser des 7)I;U7JelLdi"111(Jires à ces axes. Les risques
d'erreurs sont ainsl diminués lorsque vient le temps de définir des composantes obliques, te] (lue nous l'avons vu 3 la section 2.6.
Considérons maintenant dCLLx vecteurs de grandeur unitaire dirigés respectivement selon le sens des x et des Ij positifs. Ces vecteurs sont appelés
oecteurs unitaires et représentés par les symboles i et j (figure 2..20). Eu
utilisant ln définition du produit (l'un scalaire par un vecteur (section 2.4), nous
2
dp!1llltion c1~ oomposaares rf'tt.llîgl d3il'('~ donnée
s'applique é~~Cluëntà toute autre quantité vectorielle,
L:l
pOlit
les Iorees
,lUX sections
2.7 ct 2.8
Copynghted matenal
23
~ 7 Cornposantèa rocl<lflgJlillISS
pouvons écrire les composantes rectangulaires F.\ et Fy d'une force F en multipliant les vecteurs unitaires i et j par les scalaires appropriés {figure 2.21).
Nous avons
[,l'unI' fon:p el >teçteur~ unl1alres
Ij
F r = Fi
(2.6)
T
et
--------(2.7)
J
Les scalaires Fr et F" sont positifs ou négatifs scion le sens de Fx et Fy; leur
valeur absolue correspond à la grande1lr des composantes. F, et Fy sont les
composantes scalaires de la force F alors que F;.: et Fy en sont les CO'l~posantes vectorielles. Lorsqu'il n')' a aucun risque de confusion. les cornposantes du vecteur F désignent les unes 011 les autres. Il est il noter que la
composante scalaire FIC est positive lorsque Ft est dans le même sens que le
vecteur unitaire i (sens des x positifs) et qu'elle prend une valeur négative
lorsque FK va dans le sens opposé à i. De même, le ~ignc de F; dépend du
sens de Fy par rapport au vecteur unitaire j.
Si nous connaissons la grandeur de la foret' F et l'angle 0 (lU 'elle forme
avec "axe des x positifs, mesuré dans le sens antihoraire (figure 2.21), nous
pouvons expritner les COlll[X>srultes scalaires de F comme suit:
F!
= /: • 1
Figure 2.21
(n)
(2.8)
P =Fcos8
li:
!J
Ces relations, valables pOlir tout angle 0 compris entre 0° et 360°, définissent à la fois le signe et la valeur absolue des composantes Fr et F'J'
Exemple 1. Une foree de 800 N est appliquée à un boulon A tel qu'Illustré
à la figure 2.220. Nou... devons déterminer les composantes horizontale et verticale
de la force.
Pour attribuer le bon signé" ,111.'( composantes F, f't F 'J~ nous pouvons utiliser
(J.= 1800 - 3.'5°"" 145<>dans les équations 2.8. Nous pouvons aussi détermmer les
signes de Fr et F!J en regardant le schéma (figure 2.22b) et appliquer simplement les
fonctions trigonométriques à l'angle (1 = 35°. Nous avons
a =350
F1
A
(b)
Flgure 2.22
E, = -F cos ct = -(800 N) cos 35° = -655 i\
F'I .,. +F sin cr = +(800 N) sin 35 = +459 N
D
Les composantes
1----8 m----I
de F donnent alors
For = -(655
N)i
Fy = +(459 N}j
ct nous pouvons écrire
6 rll
F::; -(655 ~)i+ (459 N)j
l
Une personne tire sur une corde attachée ail mur d'un édifice
avec une force de 300 N (figure 2.23c,). OIIS devons déterminer les composantes
horizontale et verticale de la force exercée par lu corde au point A.
La figure 2.23b montre que
Exemple 2.
PI( = +(300 N) cos cr
Sachant que t\B = 10111 ct en référant à la
cos
Cl
8m
= B
Il
8m
--=10111
D
-
Fy
='
flgllft_'
•
SnI
(n)
-(300 N) sin cr
2.230.
cr =
IIOtiS
1) Il'1
AB
trTU!\'Ul1S
=
3
5
JI
Nous obtenons alors
FIC = +(300 ~)~ "" +240 N
Fy - -(300
~)i= -180
N
('t nous écrivons
(b)
F "'" (2-tO ~)i- (180 N)j
Rgure 2.23
Copynghted ma nal
Une force F définie par ses composantes rectangulaires Fr et FIj
(fîgure 2.21) a pour direction l'angle (J dont la valeur est donnée par
l'
tan 9 = .:J_
F,.
(2.9)
Nous trouvons la grandeur F de la force en appliquant le théorème de
Pythagore;
l1()US
avons
F = VF:~ + FZ'.J
(2.10)
Nous pouvons aussi isoler F de rune des équations 2.8.
Exemple 3. Une force F = (700 N)i + (1500 N)j est appliquée sur un
boulon A. Nous devons déterminer la grandeur de la foree et indiquer sa direction
en donnant l'angle 0 qu'elle forme avec l'horizontale.
Dessinons d'abord un schéma pour illustrer les composantes rectangulaires et
l'angle 0 (flgllre 2.24), t:tcllIùlioll (2.9) donllC
tan
e
. =:
F'I..::I 1500 N
Px
ïOO
1
À l'airlr d'une calcu lat ricc-3• il nous reste à diviser 1500 N par 700 N; l'arc
tangf'nte clu quotient donne 0 = 65,0°. En isolantF de la seconde équation 2.8, nous
F, = t 700 l") i
Agure 2.24
:r
obtenons
F
=
Fy "'" 1500 N "'" 1655 N
sin 0
sin 65,0°
Nous pouvons fü('iliter la dl..rnlère étape de calcul en plaçant la valeur de Fy co
mémoire sur la calculatrice la première fois que nous l'utilisons ; il suffit ensuite de
faire un rappel de mémoire et de diviser la valeur par sin O.
2.8 SOMME DES FORCES PAR LA MÉTHODE DES COMPOSAN 1ES
Nous avons vu que les forces s'additionnent selon la règle du parallélogramnlt? (section 2.2). Nous avons dérivé de cette règle deux autres méthodes
plus pratiques pour la résolution {!.raphiqup des problèmes: la méthode
du triangle pour l'addition de deux forces et la méthode du polygone
pour l'addition cie trois forces ou plus (sections 2,4 et 2.5), Le triangle déterrninan t la résultante de deux forces permettait
aussi une solution
t lig0710'IIéf'rÎ(I"i'.
Par contre, le polygone obtenu avec trois forces ou plus ne donne pas de
solution trigonnrrJébique simple. NOLIS pouvons toutefois trouver une solution
analytique en utilisant les composantes rectangulaires des forces. Considé-
rons, par exemple, les trois forces p. Q et S <tgisSatlt sur une particule A
(figure 2.25(1). La résultante R s'écrit
R=P+Q+S
3. La mJt:ulillrict: llolt pUUVCIIJ'effectuer
(2.11)
les fOlll..1iol1StrigonouuStriques de base
cl lenr inverse.
(".('t1Jù.nesc:lI(""l~llrk'{'.sc,_'CI')\'t:rt~l1t(11""'~lerH~lll1~scoordoueées rm:tangulaires en coordonnées
polaires, ('1 vi~ \'l'~I: $i c'est 1("cas, il Il '(',~tpltlS uëœssaire de passer par la trigolloulétrie (.'OO'IIl'1C
lionS le fru.s(lll~tldllS les exemples 1. 2, 3 et dans 1(.'5problèmes du même gpnr('_
Copynght d ma nal
En décomposant
2,8 Somme des torces par
les [otees, nous avons
Rlii + Ryj = Pxi + Pyj
= (Px
la memooe des cOlT'posan:es
25
+ Qxj + Qyj + S~j + S!lj
+ Q'f + S,,)i + (Py + Qy +
Sy)j
II s'ensuit que
(2.12)
I~lus simplement,
(2.13)
Nous pouvons en déduire que le calcul des composantes scalaires R",et R!!de
la rësultoot» R d'un ensemble (le [orees agiss({ltf S1t1' l/ue même particule 1)(!1I1
être effectué eu acùJitioflnar&t algébriqll€Iu('!llt les COlljl,oS/alltes scalaires des
forces eu cllu.~e4.
Nous obtenons la résultante en SUÎVaIlt les trois étapes montrées à la
figure 2.25. Nous commençons par décomposer les forces selon les axes r et '1
(figtlres 2.25a et b). Ensuite, nous additionnons les composantes pour obtenir celles de la résultante R (flgure 2.25c). Finillenlent, nous appliquons la
règle du paraUélograrnnle au vecteur R = ~i + RJ (flgu(@ 2.25d). Pour
faciliter ces étapes, nous pouvons inscrire tous les résultats dans un tableau
(problème résolu PR-2.3). La méthode analytique, pratique pot.lr udditionner trois vecteurs ou plus. est égalernent souvent préférée il la méthode
trigononlétrique pour faire la somme de deux vecteurs.
(II)
P'
yJ
Il
r..i
(d)
Figure 2.25
4. Cette C<Hl<.')usious'Ilpp}iljue égl:t1elllt'llt .\ d'nultes tJlillnlllk \·eccori"l1,....Ipl~ I~vitf'~~~.
les
:locélémtfoil~ OU les moments de force.
Copynghted matenal
y
PROBLÈME RÉSOLU 2.3
Calculez la résultante des quatre forces appliquées au boulon de la figure illustrée
ci-contre.
F~.. lIlON
SOLUTION
----------:;;'1
J
J
1
1
(FI ("Q!Ç3rfli
.....
..,_
~
1
de chaque force sont obtenues par projection sur les
axes choisis et leurs valeurs sont eooslgn Ses dans le tableau cl-dessous, D'après la
convention adoptée à la section 2,7, seront positives les composantes orientées vers
la droite et les composantes orientées vers le haut .
Les composantes x et
Ij
(F.. <'O.15")1
"-(Fi sln J5"'j
Force
Grandeur N
Composante
xN
-
Composa nIe y N
-
FI
F ..F3
150
80
110
+ 129.9
F..
100
+96,6
+75;0
+75.2
-110.0
-259,
-274•
0
ll..J
R.r'" + 199.1
::0
+ 14,3
La résultante R est donc
'i
On peut maintenant calculer la grandeur et l'orientation de la résultante. Du
triangle ci-contre, on peut tirer
tan a ==
!!u.:I
Rx
14,3 N
199,1 N
14,3 N
S1n
a
=
199',6 N
It
11
Le dernier calcul peut être simplifié si la valeur de Ry est D1ÎSeen mémoire
au commencement des calculs; elle sera rappelée pour être divisée par sin a (voir
note 4. P: 25),
26
,
RECAPITULATION
SECTIONS
2.7 ET
2.8
Nous avons vu aux sections précédentes que la résultante de deux forces peut être
déterminée soit graphiquement. soit par la trigonométrie d'un triangle oblique. De plus:
\)
1 (In'/"C' troi« [orcc« I)~I /"" ... UU, j1l'I,/i,/II('( ~ leur résultante R sera trouvée plus
facilement en décomposant chaque force en composantes rectangulaires. Deux situations
peuvent alors se présenter:
,,(, [ore» l' e 1 tle[tll" l' Ir !;(I t!rttll,[t, ,
" 1
l'l« rr-nutul«,
Les composantes Fr et Fy de la force (exemple 1) sont obtenues en
multipliant la grandeur F de la force par oos a et sin a, respectivement.
Cu« 1.
(:tlN;1,
lAI
[uree
Jo'
('S'
tlr[rIl;('IJtlr
rç(l
~r(lllf/('lIï,:
l'O;ulN \ et Il NI,r 1In li#.lIl' (1'(11'1;"" (fi!!.lIrc :2 2:~).
:
Il
Langle
"
'"
,/.
,1""
a formé par F et l'axe x est
évalué par trigonométrie. Néanmoins, les composantes de F peuvent aussi être évaluées
directement en proportionnant les différentes dimensions présentes, sans avoir recours au
calcul de a (exemple 2).
/11 (( n'I'(I untc« T( ('lttut!"/',;rc
de 1" ,.(,,,,,1 ( 11
Les composantes RIC et Ry de la
résultante
peuvent être obtenues par la somme algébrique
des composantes
rectangulaires de toutes les forces impliquées (PR-2,3)
La résuJtante peut être exprimée sous [orme oectortelle en utilisant les vecteurs unitaires
i et j, orientés selon les axes des l'et des y. d'où
R=Rri+RJ
Finalement, la grandeur et la direction de la résultante R peuvent être obtenues en
résolvant le triangle rectangle dont les côtés sont RIC et Rv' la grandeur de R étant déterminée par la longueur de l'hypoténuse et sa direction par l'angle formé entre l'hypoténuse
et l'axe horizontal.
27
2.21 et 2.22
présentes,
Détenuincz lits composantes
.I
et !J de chacune des forces
y
Ij
611 N
x
51' N
Figure P2.22
FIgure P2.21
2.23 et 2.24
Déterminez
les composantes x ct !J de chacune des forees
présente ..
'J
'J
35
2B
2~
'1
\
CJ
·i5
1
°t30
;'
o
\
11
lI2,.;
Dimensions
_L
r-n mm
\
Danensioas
~40
en
Figure P2.23
111111
,
1-60
Figure P2.25
Figure P2.24
B
2.25 Lélément CB d'un étau exerce une foree P en compression SUT le billot B,
dirigé(' ~il-.lolll'axe CV (Rgure 'P'2.25). Sachant que P doit avoir une composante
horizontale de 1200 !,\, déterminez:
IlJ
b]
la grandeur cie ln foret' P;
sa colnposanlc~ \ t'rtic':lJe.
2.26
Agure P2.26
28
Un cylindre "rdmuliqllC' f'\('rC(' IJr l'élément i\B une force P selon
l'axe BC. Sachant que' P doit avoir uue composante de 600 N perpendiculaire i\
l'él(ll11cnl AB. dl'tf.'nllillcz:
a)
lu t.lilJt' de la force P;
h} sn composante selon l'axf' AB.
C P
2.27 Considérez la structure cie' la figtH'<' P2,2ï, L'élélnelll BD exerce sur
l'élément ABC 11t1f' force P diligée selon J'axe' BD, Sachant qlle P doit avoir une
composante hori'l,outa)<' de :300 N, dC-If'rn'1tlC'?':
a)
b]
Prot;lonlOS
la grandeur de la force P;
sa composante
verticale.
1\
D
q=:::::::::.J
Flgure P2.27
2.28 Considérez la structure d(' lu flgurr' P2.M. L'(>IC:nlr'nt BD CX{'!'Cf' sur
l'élémcut ,\B(; 1111!.: f()f(..'(' P (Iirig(oc 5,,101' ru.'((" IJD. Sachant <tUI:! P doit avoir une
composante verticale' nf' dépassant pas 240 N, détenuinez.:
tt)
b]
Iii foree Ina.'(hlluIII dt, P;
sa composante horizontale.
Q
A
c
8
Figure P2.28
2.29 Le câble 80 applique sur le poteau de tél~pltolle ..-\C 1111(' force en
étirement P selon l'axe BD. Sachant qlle P doit avoir une ()otllposante perpendlculalr<, Ou poteau t\C de" l20 N, J~t('rlllillll'l.:
(1)
la talll l' dl' 1u Iorce P:
b)
sa colnpos:ulte orientée selon l'axe ..\C.
,\
2.30 Le câble BD applique sur le poteau cie téléphone t\C une force P selon
l'axe BD. Sachant que P a une composante orientée scion l'axe AC de 180 N,
déterminez :
a) la taille dt.' ln lorce P:
b! sa composante orientée selon
l'axe perpendiculaire
à AC.
2.31
Déterminez la résultante
des trois forces du problèrue 2.2.1.
2.32
Déterminez
des trois forces du problème 2..21.
2.33
Déterminez la résultante des trois fort:(?sdu problème 2.22,
2.34
la résultante
Déterminez la résultuntc des trois
2.35 En VOH,Çrér~l(lntEt la ftgurr'
la résultante des trois forces illllsl rées.
P2.35
fOTCt'S
<>(
du problème 2.2.'3.
Flgure P2.29 • P2,3.0
sachant fJlIr' Il :::: :!5°, rI~tf'nllinf"/
la fj~Uri' P2.36 C't SAchant <fll(" la tr-nslon $111' k· eâhlo Be
e.st de 725 N. drICJ1llillt"~ lu réSlIlttlllt(, des trols IOrt-'l.·s(lpplif!uÛPS au pOUll B de la
poutre J\8.
2.36
En
\'OuSr(of~r;\nt à
--
S1()
""11--
L = 1100
lion
lU III
Il 1111
A
IHO t\
'j(ltl N
Figure P2.35
FIgure P2.36
C P
1
29
2.37
En
flgur't' P2.3ï - P2.38 (" sachant
IlIill("l. hl r('slIltnnt<, cll's trois forces ilh I~tr(i('s.
V()\IS
r~"f(~rJlIllIla
qUI'
ex"'"40°, déter-
2.38 En vous référant à la figure P'2.3ï - P2.38 el sachant que ex= i5°. déterminez la résultante des trois forces illustrées.
2.39
En
VOliS
référant ;, la figure P2.35, détenrrinez .
a)
l'angle a pt)ur lequel la resultante des trois forces est verticule;
J,)
lu groHclt'l1r correspondante d" la résultante.
En vous référant à la figure P2.36. déterminez:
a) la tension dans le câble BC pour laquelle la résultante des troll) [orees
:.ppJjquées au point B est verticale:
b) la grandeur dl' cette résultante.
2.40
a
Figure P2.37 • P2.38
2.41
En vous rérér<lllt à la figurt" 1"'2.-4l, sachant que III résultante des trois
forces appliquées au point C de la poutre BC doit être orientée selon l'axe BC.
déterminez :
a} la
ln gnlndeuf
h'
2.42
tension r('(luise dans k· câble AC.
de cette résu Itnllt€.'.
En vous référant à la flgllre 1'2.37 - 1'2,38, détcrmlnez :
l'angle ex pour [l'quel la résultante des trois forces est parallèle 11
lI,I
l'inclinaison;
h)
la grandeur correspondante
dl' la résultante.
2.9 ÉQUIUBRE D'UNE PAR I.CULE
Figure P2.41
100 "
IOO~
FIgure 2.26
Nous savons maintenant comment déterminer la résultante d'un ensemble
(le forces agissant sur une particule. Bien que nous n'ayons pas encore
rencontré Ce cas, il peut arriver (lue la résultante soit nulle. I.:effet global des
forces en présence est alors nul et nous disons (lue la particule est en équi-
libre. Une particule est en équilibre lorsque l'ensemble (lesforces agissant sur
elle donne une résultante nulle.
Ainsi, une particule soumise à deux forces sera en équilibre si les deux
forces ont la même ligne d'action, sont de même grandeur mais de sens
opposé. La résultante des deux forees est alors nulle (figure 2.26).
La Hgure 2.27 illustre un autre cas d'~quilibre, où la particule A est
soumise il l'action de quatre forces. Pour appliquer la méthode du polygone
(figure 2.28), nous devons placer l'origine de FJ au point 0 et aligner les
autres forces bout à bout; nous pouvons alors constater que l'extrémité de F 4
coïncide exactement avec le point de départ O. La résultante est donc nulle
et la particule ost Cil équilibre.
Le polygone fermé (le la fi 'ure 2.28 donne une représentation grnphù/,.te
de l'équilibre de la particule A, D'un point de vue nlgébrique, les conditions
d'équilibre s'expriment à l'aide de "équation
FlgunI 2.27
R=IF=O
(2.14)
La décomposluon rectàIlglllaire des forces permet d'écrire
I{F..i + Fyj)
=0
ou
(~Fx}i+ (IFy)j = 0
1\ (lUS pouvons en dédui re les conditions nécessaires et sulllsantcs à l'équilibre
d'une particule. soit
~X'=o
IFy--0
(2.15)
Copynghted matenal
Reprenons la particule de 1" figuIe 2.2; et vérifions si les conditions
d'équilibre sont bien respectées. Nous a\'OJlS
2 11 Ptob.ém!Hi sur rèqull bre
o une parhcvhl, UliJgtamrn"s dOi:' t..,rcas
lFr = 300 N - (200 N) sin :30° - (400 N) sin 30°
= 300 N - 100 N - 20() N = 0
!.Fy = -lï3,2 N - (200 N) cos 30° + (400 N) ~)S 3()O
",. -173.2 N - 173,2 N + 346,4 N = ()
2.10 PREMIÈRE LOI DE NEWTON
La science de la mécanique repose sur les trois lois fondamentales
énoncées
siècle. La première de ces
par Sir Isaac Newton vers la fin du dix-septième
lois peut être formulée COITIlnC suit:
Lorsqur la force r!s,,11"flnfefllYJJlicflll:e li UIIC particule est nulle, {(I particule demeure au repos si elle érail initialement immoblle ; }Jllr coutre, elle
poursuivra son mouvement à vitesse constante cf CIl liglle droite sl elle était
înitinlemeni (;1'11 moueement.
ri découle dt' cette loi et de la tléflnilion tl'é4uilil}ré vue à lu section 2.9
qu'une particule CD équilibre est soit au repos, soit en mouvement "Il ligne
droite et ù vitesse constante. 'La section suivante présente des problèmes
divers relatifs à l'équilibre d'une particule.
2,.11 PROBLÈMES SUR L'ÉQUILIBRE D'UNE PARTICULE;
DIAGRAMMES DES FORCES
En pratique, les problèmes d~ mécanique appliqupt> s'inspirent <lesituations
réelles. dont le' conditions physiques sont représentées en détail sur un
schéma d'ensemble.
Les méthodes d'analyse élaborées dans les sections précédentes s'appliquent il des systè,nes cie forces agissant sur nue particule. BOil nombre de
problèmes mettant eo cause (les structures réelles peuvent être ramenés à
l'équilibre d'une particule localisée en un point de la structure, Nous devons
choisir un point stratégique et. sur un schéma séparé, illustrer la particule
correspondante avec l'ensemble des f()r(.:esimpliquées. Nous obtenons ainsi
un difil!.rfllltiiU' du l'(J17).~'liure (DC L), appelé aussi schéma (lu corps libre.
À titre d'exemple, considérons la caisse de 4.5 kg illustrée à ta ûgurc 2,290,
Initialement posée sur le sol entre deux édifices, cette caisse est soulevée et
chargée sur un camion pour être transportée, POlLf l'opérnuon. uu câble
vertical supporte la caisse. Le point A est attaché tl deux cordes passées dans
des poulies fixées (le part et (l'autre, aUI( points B et C des édifices. NOLIS
voulons connaître la tension dans les cordes AB et j-\C.
Pour résoudre ce problème, nous devons d'abord tracer un diagrarnrnc
du corps libre (DeL) appliqué à une particule en équilibre. Le diagramme
don inclure au motus l'une des tensions cherchées et, idéulement, les deux.
Le point A. assimilé à une particule. s'avère ici un bon choix. La figure 2,29b
montre le DeL des forces exercées sur ce point; nous )' vo)rons les forces
appliquées par le câble vertieul et l'lar les deux cordes, Le câble produit une
force vers le bas. de grandeur égale au poids '" de la caisse, L'équation 1.4
permet d'écrire
\'V -
"LI!. - (75 kg)(9,Bl ulis:!!)
=
(b) 11i"gt:'1 ru Il If' clu ('(ll'PS lihre
ï:15N
Agure 2.29
736 N
Nous inscrivons cette valeur sur le DeL. Les deux autres forCt::s Sont
inconnues 111..IIS nous savons qu'elles ccrrespondent
aux tensions dans
les cordes .l''\.B C't AC; nous les nommons (JOIlC Tr\JI ct TAC ct les traçons à
partir du p0Ï11t il dans les directions illustrées sur le schéma d'ensemble
(figure 2.290), Le DeL ne contient pas d'autre détail.
Puisque I(~ point A est t!11 équilllrre, les vecteurs des force$ placés
bout à bout doivent dessiner un triangle fermé, appelé 1ricillgle des forces
(figure 2.29c). NOLIS pouvons déterminer grHphiquenlcnllcs grandeurs TA/j
C P
1
31
et 'l~,c
si le dessin est 11 l'échelle ou encore
udlfser ln loi des sinus: nous avons alors
.t'aire appel
à la trigonomé'trie et
1',Ul
736 N
_=_
== J'AC = --sin 60°
sin. 40°
sin. 80"
1~\lJ = 64i N
TJ.\c = 480 N
Lorsqu'une particule en dqullibre est SOll(ln/se Il, t1'tH8 f()r:~. flOUS potl.
vons résoudre le problème graphiquement eu dessmant un. triangle des
forces. Lorsque plus Je trO'Î$ force» sont en présence, '(JOlIS devons tracer 'un
polyg.one des forces. Pour obtenir une solution aualytique. MUS paU'\tOfiS
tracer le' éqt:t.ati{J(1S d'éqttf/{bro données à la section 2.9.
(2.15)
Ces équations peuvetlt être résolues si elles ne conttennent pas p1us{I(~cieux
itlC()r~nues.Il en va de même pour Le triangle des forees repres'0otant tlll
équiifbre entre trois forces; 18 solution existe li condiëon (lu'i1o'y ait pa" plus
(le deux U1C01IDU,e5.
Dans les problèmes courants, les deux lnconnues sont le plus souvent
(1) les deux <x)lnpo..~nte.s(ou la grandeur et la db'acHatl) d'une même force
ou encore (i} la grandeur de deux forces dont la direction est connue. Dans
d'autres cas, 110US devons chercher la grandeur de la force minimd" ou
maximale applicable ft la situation (problèmes 2.57 à 2,61).
Copyrighted
material
PROBLÈME RÉSOLU 2.4
Lors dl! c!pchargenlent d'lin cargo, on soulève une automobile de 1530 kg à l'aide
d'un càble 'Ile corde. attachée au potnt 1\, est tirée dc' ra~otlil centrer la voltur
sur un point précis, L:iluglC'entre le câble et la verticale est de 2", tandis Gue celui
formé par la corde (>1la lignf' horizontale est dl" 3Of', Déterminez l'effort de tension
dans la corde,
If
r
1 ri J
)
SOLUTION
.,.
-
Lnutomobile
;t
un polds dr- 1530 kg X 9,8 L :-Jlkg = 15 kN,
1Jial!I'tlI11111\. du t'o'1"
1 -; I..\.
Till
puis
L2c)"
-....
libre
~DCL),
On commence
par
isoler II" point A.
QI) traec-
k- ,\('/l/inUlt/rl 1)(;14: 1~A" $t'rlt la t('IISIOrl d!:u,~ 1(· c.lbl(· 1\8, c·t TAt: 1"
tension dall~ lA corde :\e,
C nnditic," d', c!uilihrl' Puisqu'ou n'a qlle' trois forces Hppliqllé(,'$ en ,\, 011 doit
tracer Il' tri;lnglc de forees pour exprimer son équilibre, UI loi du sinus donne alors
;;J"
15kN
sin 58°
li ~
\
une calculatrice. on calcule h· dernier quonent et on l'e-nvok- en In~1I10il'C,
En multipliant SUL"l't'SSÎ\ol?JlIClIt ct' quotient par sin 1200 et SUl 2°, ou obtient
I\\C'C
1'IR
= 15,3 k;\l
1 \C = f,17 \1
~
PROBLÈME RÉSOLU 2.5
Calculez là ~ndtLur ,·t la direcuou de lu plus 1)('liLI' rOrèt· F (lui [lc)llrnc lIiainh'lIlr
1ri CHi sse 11111 1r~~'
('Î-C'Ol\tre ("1 éq U ilib 1'<.' ( la réaction des rou lcaux est perpcndiculai (<-
IS·
:.111
plun iucllué).
SOLU'nON
1
Il, t~I,lIn'IlC du c'n'11' libre (DC:l),
point IH:"rri('II" 1racr-r Il' I)CI~.
F
,
~.
\.
1
-
On peut imrnédiaternent tracer le triangle de forces
qui traduit léquilibre de la caisse. La droite 1-11 représente la direction connue dt:"P
la plus pcUtt> valeur 0(' F, S;I ligne
d'nctiou doit être perpendtculaire à P. Ensuite, on obtient du trinnt!;le de forces
( 'li grUlld('lIF ('SI illCOIlIII'IC),
Si
on \(~1I1obtenir
F; (29" N) sin 15D
1
Il'
un
( IIltl,liulI cl '·lluilihl't·.
l5"
l'
On cloil considérer la CHissr comme
::.
76.1 N
a = 1500
1; = 76..1 '~15°
~
1
33
•
•
PROBLEME RESOLU 2.6
L'équipe responsable de ~'lconception d'un nouveau type de voilier veut connaître
la force cie traînée à une certaine vitesse, Pour cela, WI prototype de la coque
proposée est placé dans un bassin, L'équipe simule la situation en urihsant trois
câbles pour stabiliser le bateau au centre <.111 bassin , De' dynamomètres indiquent
Il une certaine vitesse Ics lectures suïvantes: câble AB, 400 N; câble AE, 600 N,
Déterminez la force de tnûnéc appllquée sur la coque et la tension dans le câble AC,
Cournnl
SOLUTlON
tI ., lC1114h·", 00 doit commencer pa.r déterminer les angles exet A
qui indiquent les directions des câbles AB et AC, respectivement. On peut écrire
l " hu.1
T,IC
Cil.
tan ex::::;
l m
,8= 20.56"
411)
= l ';5
IL:'
1111111('
fJ
= l.5
donc
fJ
= 20,56°
ID
4m
,
donc ex=< 60,26°
li
tan
= 0 375
'
du C.:HI p" lilu ( 1Dt' LI. On doit d'abord choisir la coque comme
d'équilibre et tracer le diagranune des forces te) qu'illustré. On doit ensuite
y inscrire les forces appliquées par les trois câbles ainsi que la force de traînée Fv
exercée par l'eau,
« l ,,,"Ijull tl"'lullilu c' Léquation suivante exprime la condition d'équilibre
de la coque du navire:
point
''',u:- = (11)(1 N
R = T....
s + T,le
+ T.-\t:+ FD
=0
(1)
Étant donné qu'il y a plus de trois forces en présence, on doit les décomposer selon
leu rs (..'oOrdOT) I\N:S x ct '1:
!J
T 1.... (·(0102O,:;t;0
t-1lr<lN1
.'U.\
r.o2l;"
J
.,./.,.
J
Fp = F,:)i
'L-lH- 2tI,SC;.
6O.26°·--r"......,__.,
-(400 Ni ~'" 6(1ffi" i
T,Ill = -(400 N) sin 6O.2.60j + (400 N) cos 60,26°j
-= -(347,3 N)i + (198,4 N)j
TAC == TAC sin 20.56°j + TAC cos 20,56°j
= O.3512T ACi + O,9363T,\c;j
TAt; == -(600 N)j
En snbstituant ces expressions dans l'équation 1 et en mettant en facteur les vecteurs
unüarres i el j, on aura
A.
-tflll() ,\1J
(-347,3 N
+ O.3512TAc + Fo)i + (198,4 N + O,9363T"c -
600 N)j ::::;0
Cette équation sera satisfaite si, et seulement si, les coefficients des vecteurs i et j
sont nuls, On a donc deux conditions d'équilibre exprimées chacune par une équation (une pour chaque axe, x el y), La condition d'équilibre exige que les deux
composantes soient nulles,
-34;,3 N + O.3512T"c + F 0 == 0
198,~ N + O.9363T ....c - 600 N = 0
(1FT = 0:)
(IF!! = 0:)
fa = 196,6 N
La
solution de l'équation 3 donne
En substituant
13= 20,;56"
En
cette valeur dans l'équation 2, on aura
t \f
/'0 -
= +-t2!J ~
+ 1tlii
fi ~
04
..
le diagraulfYlt:: des forces, on a attribué arbitrairement une direction pour
chacune des forces recherchées, Une valeur positive dans la réponse indique que
le sens est correct selon l'hypothè,se de départ. Le traç...age du polygone des forces
traçant
presentes permettra
34
(2)
(3)
de valider les résultats,
,
RECAPITULATION
"
SECTIONS
2.9 A 2.11
Quand une particule est en équilibre, la résultante des forces qui lui sont appliquées est
nulle. Si nous appliquons ce principe dans le cas de forces coplanaires. deux équations
exprimeront les relations entre ces forces. Tel que présenté dans les problèmes résolus
précédents, nous pouvons alors déterminer soit la grandeur et la direction d'une force, soit
la grandeur de deux forces. Nous pouvons suivre la démarche suivante pour solutionner
ce type de problème.
I.H:
ff
•
Ce diagramme représente la particule
ainsi que l'ensemble des forces auxquelles eUe est soumise. NOlIS devons y indiquer la
grandeur des forces connues en prenant soin d'identifier tout angle ou toute dimension
permettant de déduire la direction d'une force. Les grandeurs et les angles inconnus sont
indiqués par des symboles appropriés. Aucune autre information n'apparaît dans le
diagramme du corps libre. Un diagramme du corps libre clair et précis est de grande
importance pour la solution de ce type de problème: son omission conduit directement à
des conclusions erronées.
f
dans le diagramme du corps libre, la meilleure
solution au problème consiste à tracer les forces bout à bout pour former un triangle des
forces. Ce triangle peut être solutionné graphiquement ou trigonométriquement lorsqu'il
n'y a pas plus de deux inconnues. tel que présenté aux problèmes résolus PR-2.4 et PR-2.5.
( Il.'< :
la solution analytique est préconisée.
Les forces sont exprimées selon leurs composantes (axes des x et des !I)' Nous obtiendrons
alors deux équations, une pour chaque axe. La somme algébrique des composantes doit
être égal.e à zéro en situation {l'équilibre. On peut solutionner les deux équations lorsqu'il
n'y a pas plus de deux inconnues (problème résolu PR.2.6).
1
1
Il est fortement recommandé de suivre la démarche préconisée par les équations 2 et 3
telles qu'elles sont appliquées au problème PR-2.6. Toute autre approche, bien que
mathématiquement valable, peut nous induire en erreur lors de l'interprétation de la
direction des forces.
Concluons que, dans le cas de corps en équilibre dans un plan, les solutions présentées
jusqu'à maintenant concernaient des problèmes à deux inconnues. Si nous sommes en
présence de plus de clULL'\: ineonuues, nous devons trouver au mein ...une autre équation
décrivant la situation poUT pouvoir trouver la solution.
35
C P
2.43
i\
Deux câbles sont reliés l'un à l'autre tcl qu'illustré à la 6gure P'2.43.
Déterminez;
la
b]
la tension dans le câble BC.
2.44
c
tension dan" le câble AC;
a)
DeLL\ cibles
Sachant que
0)
b)
2.45
ct
sont reliés l'un à l'autre tel qu'illustré
à la figure F-2.44.
= 20°, dérerminez :
la tension dans lé câble /\(:;
Lntension dans le câble BC.
En
YOUS
référant
à
la figure P2.45 et sachant que cr = 20°, détermlnez :
il)
la tension dans le câble AC,
'))
la tension dans la corde BC.
8
Figure P2.A3
B
Figure P2.45
2.46
En vous référant 11. la figure P2 ..t6 et sachant que ct = 55° et que la
poutre AC applique sur la cheville C une foree orientée selon l'axe AC, déterminez:
a) la grandeur de celte force:
1,) 1:1 tpnsÎon flarl5 le câble- Be
200 kg
Figure P2.44
Un télési~ge a été arrêté nia position illustrée li la figure P2.47 - P2.48.
Sachant qU(' chuque ~i
i\gc du télC-siègr pese 2.50 N ct (lue k. personne assise dans
le siêge E pèse 765 N. déterminez lé poids de la personne assise dans le siège F.
2.47
En \1'()US référant à la ngtlre P2.4ï - P2.48. sachant
pèse 250 N et que la pel'sonnf' assise dans le si~g F pèse 926
poids <1('la personne assise dan. le i~c E2.48
1--- 1'"1 --)----
fi
:1~III ---
qUi'
chaque siège
r, déterminez
III
b..1S
ni
20"
III
fil
<:
-
if
Agure P2.46
36
Figure P2.47 - P2.4a
D
1
1 If) III
1
ProOlemes
2.49 Deux fore 'S de valeur FA = 8 kN et Fa = 16 kN sont appliqoées au
gousset d'assemblage soudé tel qu'ilIustré li Lafigure 1'"2.-19- P2.50. Sachant que
l'assemblage est en état d'équilibre, évaluez la valeur des deux autres forces BII
37
présence.
Deux forces de valeur F" = 5 kN et F'D = 6 kN sont :lppliqllffLS ail
gousset d'assemblage SOli dé tel que présenté à 1" figure P2.49 - P2.50. Stl("~ltlJlt que:
l'assemblage est en état d'équlhbre, évaluez les deux autres forces en présence.
2.50
Fil
c
B
Q
p
Figure P2,49 • P2.SO
2.51
Les forces P et
Q sont
Figure P2.S1 - P2.5.2
appliquées au gousset d'assemblage d'un aéronef
i\
à la Agure P2.51 • P2.52. Sachant que l'assemblnge est eu état d'équilibre et C)11e P = 500 N et Q = 650 ~. calculez la grandeur des for'Çc's appliquées
sur les barres A et B.
tel
(lU 'illustré
2.52 Les forces P et Q salit appllquées eu gousset d'u,,ssclllblagc J'lIII aéronef
tel que présenté il la figure PZ.51 - P2.52. Sachant qu(' l'assrmblagr est l'ft (Slnl
o'cXtuilibre Cl que les forces apphquées Sur le barres ,\ C't B sont respcetivemcrn
de FI. "" 750 N et de Fa = 400 N. évaluez la gnuldeur des forces P et Q.
Un téléphérique est supporté par le câble-porteur ACB ct est n16 à une
vitesse constante par 1<-câble-tracteur DE tt·1 C]lIïllllsln'" à lu Ogun.' 1'2.53 - P2.S....
2.53
Sachant que le poids cl la cabtne. passagers ct mécani
que a"" 45° ct t3.", 40°. (.'1 en
négJigeable, déterminez :
0)
ù)
1I"Upposant
ln tension dans le câble-porteur
qllc
inclus. est dt' 22,5 kN,
1.. tension dans le câble DFest
II)~
r\CB ;
ln force d~ traction du câble-tracteur DE,
2-54 Un téléphérique est supporte< par II' câble-porteur ACB et ('-sl n1(1 à une
vitesse constante par le câble-tracteur DE tel qu'illustré t~la figure P2.53 - P2.54.
Sachant que la tension dans Je câble-tracteur DE est de 18 k~, qlJC 0: = 48 el
t3 "'" 38°, ct en supposant quo 1.. tension dans 1('câble J)F est nt_'l.gligcable,détcrmlncz :
Il)
le poids de la cabine, passagers et mécanisme inclus :
b} la tension appliquée dans le câble-porteur ACB.
D
Figure P2.53 • P2.54
A
2.55 Deux câbles sont reliés ensemble un point C tel quïllllstr~ il la figure
PZ.55 - P2.56. Sachant que Q = 60 N. calculcz ;
Il) la tension dans le câble AC;
J.I)
ln tension dans le câble BC.
2.56 Deux câbles sont reliés ensemble au point C tel qu'illustré à la figure
P2.55 - P2.56. Évaluez l'étendue des valeurs possibles nC' la force Q afln que la
tension appliquée sur chacun des câbles AC et BC Ile dépasse pas 60 ~.
2.57 Deux câbles sont reliés ensemble au point C tel qu'illustré à la figure
P2.57 - .PZ.58. Sachant que la tenston rlHl'\:inlaJc sdmtssiblc duos chaClln dos clbl(>s
AC et BC nt:' doit pas dépasser 800 N. détcrnuucz:
(1) la gr.mdeur maximale de la force P à appliquer au point C;
IJ) la valeur de l'angle a correspondant.
B
Q
Figure P2,55 - P2.56
C p n
38
La sIal-que etes par1lcules
2.58 Deux câbles sont reliés ensemble au point C t....l qu'Illustré à hl AgHre
P2,57 - P2.58. Sachant que la tension maximale admissible dans le cûble AC est de
1.200 N et celle admisslble dans le' câble BC est de 600 N, détenninez:
CI) la force P à appliquer au point C;
b) ta valeur de l'angle a correspondant.
2.59
En VOllS référant à la situation décrite au problème 2.46. détërminez:
a) la valeur que doit avoir l'angle a pour que la tension appliquée SUT le
câble BC soit minimale ;
la valeur dt' celte tension.
l,,,
2.60
En VOliS ref~ranl à la situation décrite au problème 2.45, déterminez:
a} la valeur que doit avoir l'angle a pour que la tension appliquée sur la
corde BC soit minimale ;
Il)
ta valeur de cette tension.
FIgure P2.57 • P2.58
2.61
2.44. déterminez:
la valeur qllc don avoir l'angle â polir 'Ille la tf>llSion dans If' câble BC
En
\QIIS
œl~rnnl à la situation décrite au problème
a)
soit minirnale ;
b)
ln v-aleur dt> celte tension.
2.62 Une force de 1200 N est appliquée au point C exactement au centre du
câble I\C8 (figUf<' P"2.62). Déterminez la longueur minimale du câble, sachant que
la force uiadmale <lppLiqll(':(' sur chaqu portion du câble ne doit p!L~dépasser 870 N,
f---x
c
400 mm
Figure P2.62
2.63 Le manchon A, glissant sur une tige horizontale tel qu'illustré à la figure
P2,6J - P2.64, est relié 11une charge de 25 kg. Évaluez la force P nécessaire pour
garder le montage Cil équilibre si:
0) on désire une distance s = 00 mm ;
I" 00 désire une distance x = 300 11H11.
J\
FIgure P2.63 - P2.64
2.64 Le' manchon .1\, glissant sur une tige horizontale tel qu'illustré à la 6gure
P2,63 - P2.6-J, ("si ff'lif à une charge de 25 kg. Si P ;; 200 N, évaluez la distance x
p(:~rlllt'ttsnt dt, garder 1(' !llOnlage en équilibre.
2.65 C0l1sid61"C'Z le montage Illustré à la n.~,lIrc P2.65 - P2.66. constitué d'un
S}~1ème de poulies et de rordage-s. Déterminez la grnndeur de la force P et l'angle a,
sachant que f3 = 20" et que le montage en situation d'équilibre supporte une charge
de 160 kg. (Suggestion: pour cette situation, supposez que la tension dans la corde
est la même de chaque côté de la poulie, comme on If>verra au chapitre 4.)
2.66 Considérez le montage illustré à 1a agure P2.65 - P2.56" constitué d'un
système de poulies ct dt' cordages. SlichAnt que (l "" 400 ct que le montage en situation d'équillbre supporte une t:lLargede 160 kg, déterminez:
a) l'anglE"f3 (suggestion; pOllr cette situation, supposez que la tension dans
la corde est la même de chaque côté de ta poulie, comme on le verra au chapitre 4) ;
J)) la grondeur de la force P.
160 kg
Figure P2.5S • P2.66
2.67 Une caisse de 61.2 kg doit être soulevée, Divers mootnges sont sug~
gl'rés tel qu'illustré ;1 la f1!(Ure P2.67. Déterminez la tension Tpour chacune de ces
Copynghted ma nal
2.12 COll'poc.an·o'1 rectanqulùlrf!S dans re:;.paœ
l'
T
39
T
'r
A
(
-.=
(li ~
(il)
)
(t')
{dl
D
Figure P2.67
p
configurations (0 à c). (Suggestion; pour cette situation. supposez que la tension dans
la corde est la même de chaque côté de la poulie. comme on 1(' \'t'mt Ilu chapnre .J.)
Q
Figure P2.69 - P2.70
Trouvez la solution pour I~ IHuutugl:S b cl </ du problème 2.67, en
supposant que l'extrémité libre de la corde est attachée à la caisse.
2.66
y
Constdérez ln figure P2.69 - P2.iO. La poulie C, se déplaçant sur le
2.69
câble ,1GB. supporte une charge Q. Un second câble
CAO, pa
8
sant p.1r la poulie A,
tient en position la poulie C. Une eharge P de ï50 N est appliquée à l'extrémité D.
Calculez
!
a)
h}
Latension appliquée sur le <.:;lble AClJ ;
la valeur de la charge Q.
o
Considérez ln Ilgure P2.G9 - P2.ïO. La poulie C, se d6phlÇO'iltl sur le
01h10 AC8, supporte "11(: charg(' Q de 1800 r\. Un second cûll'e CAO, passant pttr
la poulie A. tient en position la poulie C.· ne charge P est appliqué • à l'cxtréuiité D.
;r
2.70
Déterrnlnez ,
(1)
lr)
--
la tension dans le câble ,.\C B ;
la valeur de la charge P.
(a)
y
FORCES DANS L:ESPACE (30)
2.12 COMPOSANTES RECTANGULAIRES DANS L:ESPACE
A
Tous les cas étudiés jUStju'iCi se résolvaient dtULS un plan faisant appel à deux
dimensions seulement. NOliS abordons maintenant des problèmes situés
dans un e.''-pace tridirnensionnel (3D).
force F appliquée à l'origine a d'un système de coordonnées rectangulaires x,!Jt z. Pour définir sa direction. nous traçons un plan
vertical OB/I.e contenant le vecteur F (figure 2.30a). Ce plan passe par l'axe
vertical If et son orientation est donnée par l'angle lb qu'il forme avec le
plan xy. Langle O!!, situé entre F et l'axe des y. définit la direction de F clans
ce plan. Si nous décomposons la force F en une composante verticale F!I
et une composante horizontale Fil (nh'tITe 2.30b), nous travaillons dans le
Considérons
UJ1C
(b)
8
plan OBAC selon les règles établies pour les forces coplanaires en premtëre
partie (lu chapitre. Les composentes scalaires correspondantes s'écrivent
l''1
(2.16)
D
F,.
Nous pouvons ensuite décomposer
en deux composantes rectangulaires
FK et F= dans le plan x;;. dirigées respectivement selon les axes x et z
(figure 2.3Oc}. Nous obtenons
F", = Fil cos lb = F sin 0!l (;OS ri>
F:. = FI, Si11 ch = F sin (}!I sitl <1>
(2.17)
jF.
-
x
c
-
Figure 2.30
Copynghted ma nal
40
La stauquo d·
s parncu
Nous avons donc trois composantes vectorielles rectangulaires F x , Fy, F::.
dirigées selon les trois axes du système de coordonnées.
En appliquant le théorème de Pythagore aux triangles OAB et OCD de
1.1 6gure 2.30, nous trouvons
015
'1
FZ = (OA)2 = (OB}2
+ (Bi\)2 = F~+ Fl
F?t '"" (OC)2 = (ODr~
+ (DC)2
= F.~+ F~
En éliminant Fr. de ces équations et en isolant F, nous obtenons une
expression de la grandeur du vecteur F en fonction de la grandeur des
composantes rectangulaires.
(2.18)
Nous visualisons plus facilement la relation entre la force F et ses
composantes en représentant une boite dont les côtés correspondent à FX>
F'I et F;: (flg1lre 2.~31).Le vecte-ur F devient alors la (liagonale OA de cette
b()Îtf>.La fj~'t1rc2.31b montre le triangle rectangle Or1B ayant servi li dériver
la première des équations (2.16), soit Fy = F cos 9v' Sur les figures 2.3la et c,
les triangles 01\0 ct Oi\E occupent des positions comparables à celle du
triangle OAB. Si nous notons el et 8: les angles formés par F avec les axes
x et ;; respectivement, nous l)O·I1VOI1S dériver des expressions similaires à
F" = F cos 9" pour les autres directions. Nous obtenons
c
(ri ~
(2.19)
c
Les trois angles 0x, 8y el 8=.définissent la direction de la force F: nous les
utilisons plus couramment que les angles O!J et c/J définis au début de cette
section. Les cosinus des angles OT' 8y ct 8; sont les cosinus dlrecüonnels de
la force F.
Avec l'utilisation des vecteurs unitaires i,j et le orientés respectivement
selon les axes x.y et z {figure 2.32). le vecteur F peut s'écrire:
Ibl
(2.20)
oü les composantes scalaires F~, F!fet F:. sont données par les équations 2.19.
Exetnple 1 Une force dl' 500 N forme d(~ angl s do 60'>,45° ct )20° avec les
axes x. y ct .;;resrpectivemcnt. Déterminons les <''ôlllposanles l'x. l'y ct P; de la force,
En substituant les valeurs f' = 500 N. 9x = 00°. (JI) = 45°. 9.. = 1200 dans les
-
w
Figure 2.31
équations 2.19, nous trouvons
cos 60° = +250 ['\
Fu '" (500 N) (,'OS 45° ~ +3.54 ~
F= = (500 N) L'OS 120° = -250 N
Ft
= (500 N)
En insérant ces valeurs clans l'équation 2.20, l'expression de F devient
Il
F ~ {250 t\')i + (354 N)j-(250
')k
La convention de signes reste la même que pour les problèmes en deux dimensions :
It!.sig1ll' positif défiuit une composante orientée dans III sens pôsitif de l'axe et le signe
négatif indique le sens inverse.
j
1
/
--
FIg.ure 2.32
x
Nous mesurons l'angle entre la force F et chacun des axes à partir du
côté positif de l'axe et la valeur sc situe toujours entre 0° ct 180°. Un a.ngle ex;
inférieur à 90° (aigu) signil!e [l'le F, appliquée à J'origine O. se trouve du
même côté du plan. yz que l'axe des x positifs; cos 8r et Fr sont alors positifs.
Par contre, ~il'angle 8x est supérieur à 90° (O}>tlIS). F est {le l'autre côté du
Copynghted ma nal
plan yz; OOS (}l. el Fl. sont alors négatils. Dans t'exemple 1, 08 et 0,:/ ont aigus
alors que e% est obtus; en couséqnenee, Fx et Fy sont positifs et F:. est négatif.
En substituant dans l'équanon 2.20 les expressions de Fll' F" ct F:
212 Composantes 'ectBflgu:9ire~ clans rescaea
41
obtenues en 2.19, nous trouvons
(2.21)
1\ ous en déduisons
le vècteur suivant:
qUf' la force F œrrëspond au prorlu_ït du scalaire F p:lr
(2.22)
g
Le veeteu r A est de btrulldcur égale à l'unité. il est orienté clans la direction
de F (figure 2.33}. Le vecteur A ttst donc le vecteur u~ttl(lf.roori mté selon la
ligne d'action d . F, 1: 'C)ufltion 2.22 indique que les composantes du vecteur
unitaire A correspondent aux cosinus directeurs cie la ligne d'action cio F, soit
(2,23)
_
À..w = cos (J~
,tt""'J'
'1
Il est à. rClnarquer que les valeurs des angl~sBr, 8y 1!!t 8= ne sont pas indé-
pendantes. En nous rappelant que la. emme des carrés des composantes
d'un vecteur ('tgal€:!Il' carré <le sa grruldeu,r,
A;
+
A; +
llOUS pollVOl1S
À~ =
:t
1
F.k ,"'--
plus haut pour
En mbstituant le valeur' obtenue
écrire
F.i,
1
À.... Ày
et À:;, nous trouvons
(2.24)
_'
/~
Figure 2.33
Revenons au cas de l'exemple 1: une fois que les valeurs ex = 600 ct
Dy = 45° 0111 rlXé • l'rulgtf' 0: doit absolument être égnI à 60° Ou il l20°
pour satisfaire à l'équation 2.24.
Lorsque les composante F!I.' FI) et Fz. de la force F'scnt connues.I'ëquetion 2.] détermine P, 1;1 grandeur du vecteu~. ' eus commençons par
calculer .lt"S cosinus clirectioonels à l'aide des équations 2.19.
cos
elJ
Fu
=---F
Nous trouvons ensuite Ic~ f1.llg)<: OK'
@y
(2,25)
et 9:;, quI caractérisent la dÜ"ElCliC>l\
de F.
'oret:
UnrF fi pour composantes [t~ c 20 ',FI) c::: -30 1 et
F::r.... 60 N. OuS voulons déterminer sa gmtldew' F ainsi que tes angles 0... 0" et 8=
qu'elle forme uvee les a.1C.CS du système de coordonnées.
eus ntlltsons d'nbolYl )'c{CilllltiQn 2. J ' G:
Exemplfl
2
V F2• + -Fitj + F2
= V(20 N)~+ {-30
- V4900 X ... 70 ~
F =
%
N}!.:
+ (00 X}!
En insérunt 1 ·S vaJ('II......"('~ composantes et dt' la graJ)(léur dp ln fore- dall) les
.
équ ulons 2.2.5, nOH!) lrouvonli
L)
co
5. Si vous 111'11»<:11
une (; LlclIl.llriœ
liées 'OOI(lIl~lllrtll
':,>
Cil (;,Kln]O'(I,nées
v"
=<!,p, = -30 N
P
prog1tunrn':e
10
1
1=~=_60_
cos l,;;
li'
70 N
pour convertir directement
polaires. IlOUS vous ~'rons
les coordcn-
de procéder comme
Mult;
dél~rml!l(,v. d'al)(lId 1~ Il prt11ir ,Ii' If, et F. (flt,.'lll'e 2..3Ot'). tro~
8nwite F' i\ (lart1v de P",l't F!t
(figllre 2.3(lb). Nolt~~fille l'VIdre d'entrée de F.., Ffi et F. est SIW$ hnpo.rtanoe.
a
Ibid.
Copynghted malena
42
La statique d8$ particules
calculons les quotients et nous appliquons ensuite la fonction ure cosinus pour
obtenir les angles:
NOliS
La calculstrice perlnet d'effectuer facilement ces opérations,
2.13 FORCE DÉFINIE PAR SA GRANDEUR ET DEUX POINTS
SUR SA UGNE D'ACTION
Dans bien des applications. la direction d'une force F est définie par les coordonnées de deux points situés sur sa ligrle d'action, nommés i\t[(XI, '11, :;1) et
l-J(Xl? 'ln. Z2). tel que montré à la flgure 2,34. Considérons le vecteur !YIN
y
x
..
•
Agure 2.34
joignant M et N, dans le même sens que F, dont les composantes scalaires
sont notées d,,!:,dy et d.; Nous pouvons écrire
AIN = d~i+ dyj + d:k
(2.26)
Nous déterminons le vecteur unitaire À, orienté selon la ligne d'action
commune à F et l\.1N, en divisant le vecteur l',.IN par sa gra.ndeur i\IN.
Sachant que MN correspond à la distance d qui sépare Nl et N, nous remplaçons l-ifN par l'expression de l'équation 2.26 et nous obtenons
(2.27)
F étant égal au produit de F et
À,
nous avons
(2.28)
Les composantes scalaires de F s'écrivent alors
(2.29)
Les équations 2.29 simplifient beaucoup le calcul des composantes
d'une force F lorsque sa lib>'nc J'àcti.on est défl.nie par deux points M et N,
Nous obtenons les composantes du vecteur AIN en soustrayant les coordonnées de hl de celles de N et nous trouvons ensuite d, [a distance qui sépare
ces deux points :
li,... = X2 - Xl
lly
= 1.12 - !Jl
li
-
~
--
-
._-
,N-:)
-1
Copynghted matenal
En substituant ensuite F. (lx. dy• d;:. et d dans les équations 2.29. n011S
pouvons déterminer facilement les composantes F,;. Fy, el F~ de la force.
Les équations 2.25 donnent les angles 8:n 9y et 8~formés par le vecteur F
avec les axes du système. En comparant les équations 2.22 ct 2.2ï, nous
pou~vons également écrire
(.'0..
d.JI
9 =-
2.14 Addiuon de forces
clans fe.paoe
(2.30)
d
et déterminer les angles 6.x.8y et 8: directement
vecteur Ml\' et de sa grande1lr 'ft"fll/.
à partir des cornposantcs du
2.14 AODmON DE FORCES CONCOURANIES DANS l'ESPACE
Nous obtenons la résultante R de deux ou plusieurs forces dans l'espace cn
additionnant leurs composante.') rectangulaires. Les métlloc!é"$ gruphifllle:; et
trigonométriques s'avèrent peu pratiques en trois dimensions,
Pour additionner les forces, nous procédons cornille il est indiqué li la
section 2.8, c'est-à-dire avec les forces coplanaires. Nous avons
R=IF
En décomposant les forces en composantes rectanzulaires,
R:ri
110llS
avon .
+ Ryj + ~k = !(F.ri + Fyj + F~k)
= (!F.r}i + (!Fy)j + (IF:)k
Il s'ensuit que
(2.31 )
Nous déterminons la grandeur de la résultante et les angles Or, 8y ct 0;
qu'elle forme avec les axes en procédant comme à la section 2.12. NOliS
écrivons
R = v'R~ -1 R~+ R~
R,
ces 8 =R
'"U.
1
cos 0y = &
R
(2.32)
cos O. = R~
•
R
concourante.
(2.33)
c
43
PROBLÈME RÉSOLU 2.7
Un hauban d'une tour est ancré au point A. La tension dans le hauban a été
évaluée à 2500 N. Calculez:
Il J
8C)IJI
les composantes FA' F)' et Fz de la force transmise
b" les Wlgles
IIU
boulon d'ancrage;
9y et 8~qui définissent la direction de cette force.
(J/t,
SOlunON
u) <:ulnp() ...antes de la force. La ligne d'action do la foret' trunsmise au
boulon d'ancrage passe par les points A et B et la force est orientée de A vers B.
AB
Les composantes du vecteur
ont ln même direction que la force, Elles sont donc:
d.,,= -40 ru
La
d, = +30 ln
dr; = +80 m
distance entre A ct B est
AB = d =
Oln
Vrl~+ d1 + di = 94,3 m
-.
En e-Xprimant le vecteur AB à l'aide des vecteurs unitaires i, j et le, on a
---.
AB
x
En introduisant
= -(40 In)j
+ (80
In)j
+ (30In)k
_,.
le vecteur unitaire A = AB/AB, on écrit
----t
2500NF = FA = F
=
AB
AB
94,3 III
AB
-
En substituant l'expression du vecteur AB, on obtient
F =
2500 N
1\.4
::1"2,3 m
(-(40 ut)i + (80 l)))J
F = -(1060 N)i
+ (30 nl)l<]
+ (2120 N)j + (795 N)k
'J
d'où les ccmpcsantes de la force F:
,,'t--Jo(14)~
1;,,-..L212(1N
J_-+79Si\
b) Direction
de la force. En résolvant les cqueuoos 2.25 par rapport
cosinus dlreeteurs de là droite AB, 01) obtient
CO!)
F6
-1060 N
Fr;
=
=
---• F
2500N
8
cos O!' =
F.
F;;:;
....
3U,,'(
+2120 N
2500 N
+795 N
cos 8:, ;;: -; = 2500 r\
x
d'où
0,
=
115,'~
(}·'!ote. Ce résultat aurait aussi bien pu être obtenu à l'aide des composantes et de la
z
44
grandeur de la force F.)
~(_
PROBLÈME RÉSOLU 2.8
J
2ÎUl
~ III
Une section de IHUT est temporairement retenue par des câbles, tel qu'illustré li ln
Agure ci-contre. Sachant que ln tension dans le câble r\B est de 8,4 kN et celle dans
If' câble' AC de 12 kt'\, calculez IIIgrandeur et la direction de la résultante des forces
au piquet situé au point A.
,)Il
SOLUTlON
I_(·~ Ciull!l(), unl(·" de .. foreev.
La force' 3j)pIÎ'l1l~c par chaque cable' sur le
piquet i\ peul (lue décomposée en ses cOluposantcs selon les axes des .T, y et .:.
Ou commence par calculer les composantes et les valeurs des vecteurs AB et AC.
en les mesurant du piquet A vers la section du mur, En utilisant les vecteurs
unitaire. i j et k, OH a
-.
rVJ
AC
-- --
+ (8 m)j + (11 rnlk
+ (81n)j - (16 11I)k
= -( l6 Dl)i
= -(16 [n)i
AB = 21 ru
r\C = 24 m
En idennfiant 1" vecteur unitnirc selon AB par lo symbole
__,
..
T.-\8 = 1,w.\'\8
=
AB
TAB AB
=
Â,IH.
alors
8,4 kN _.
21 m ;\8
('
-+
En substituant dans l'équation l'expression du vecteur i\B, on obtient
!J
Till: = (12 Il:'\'' "AI'
8 1 kN
).u
./
\-y
11
,/
m)k]
T.~B= -(6.4 kN)i + (3.2 k.\i)j + (",4 kN)k
./
/'
+ (8 rn)j + (II
T.\8 = ." 1 1-(16lîl)i
21 III
,._
110
III
'Oc la
Ill(lll)~fl\ç-on,en
Identifiant par le )'lobofc
on obtiellt
t\C
III
T,\(' = 7':\c.\,,(' ;:;
.r
T \('
:::a
TAC
le vecteur unitaire selon AC.
Â.\C
12 kN ---+
AC = 24
111
AC
-CR kN)i + {4 kN)j - (8 kN)k
la ré ..ultante des fOI'CC". [...1 résultante R des forees exercées par les deux
câbles t' t
+ T,,(' = -( 14,4 kN)i + (7,2 kN)j - {3.6 k.\i)k
On calcule ensuite la gr.\ndeul' ct la direction de la résultante;
R = TAS
R
=::
V R~ + Re + R~ "" V( -l4,4}Z + (7,2)Œ + (-3.6)lÎ
/~
1\ partir des équations 2.33. on obtient
R. - 14,4 k1'\
_.& _
cos O;c == fi = 16.5 kN
cos
cos 0'1 R..
n -
16.5 I.N
~
+7,2 kN
16.5 kN
-36 kN
-16.5 kN
(J~:;;;;...:. .. -~.
•
R
d'où
0, = l50.~
n,,=6LlO
(J.•
=
J 0:2.6"
45
,
RECAPITULATION
...
SECTIONS
2.12
A 2.14
Dans ces sections, nous avons vu que les forces dans l'espace peuvent être déflnles soit par
leur grru1deur et leur direction, soit par leurs composantes rectangulaires Fll' Fr et F7,.'
..\)
Q'itlllll
,,,.(' !ur',·t! elll
(/ifillic
l'tir
rectangulaires peuvent être déterminées
g"(lu(lC'ur o lUI (1;,,('('/;011. ses composantes
de trois façons différentes, dëpendamment des
Hil
données dont nous disposons:
C:tlH 1. Si la direction d'une force est déterminée selon les angles Byet q, (figure 2.30),
nous la décomposons à l'aide des équations 2.17. Ainsl, nous commençons par décom-
poser la force F sur le plan verticallj (F!I) et sur le plan horizontal (F,,). Ensuite, nous
décomposons Fil en ses composantes F%et F: (figure 2.3Oc).
Si la direction de la foree F est définie par les angles Bn 8!1et B:, la grandeur
des composantes selon les trois axes est obtenue par la multiplication de la grandeur de
(:01(
2.
la force F par le
COSU1US
de l'angle correspondant (exemple 1):
Si la direction de la foree F est définie par deux points dans l'espace (M et lt.')
situés dans sa ligne d'action (figuré 2.34), nous devons d'abord exprimer le vecteur MN
par ses composantes dx• dy, d; et par les vecteurs unitaires i, j et k, d'où
(;01(
J.
~fN= dri
+ dyj + ~k
un vecteur unitaire A orienté selon la ligne d'action de F.
Ceci se fait en divisant le vecteur MN par sa gr'cirl<!ellr ~[N. En multipliant À par la
grandeur de la force F, nous obtenons F exprimée selon ses composantes rectangulaires
(problème résolu PR-2.7).
ous devons ensuite déterminer
Il est important d'utiliser un système d'annotation cohérent et significatif quand vient Je
temps (le décomposer une force selon ses coordonnées rectangulai res. La méthode
préconisée dans ce livre est illustrée uu problème résolu PR-2.8 où, à titre d'exemple, TAB
agit du piquet A vers le point B. Il est à noter que l'ordre des lettres indique la direction
de ln force. Il est recommandé d'utillser cette notation, puisqu'elle permettra de distinguer clairement le point l, identifié par le premier indice et représentant l'origine de la
force, et le point 2. identifié par le second indice et représentant l'extrémité de la force.
Finalement, rappelons l'importance d'utiliser les bons signes pour indiquer la direction de
chacune des composantes d'une force.
46
H} Q"/uul",'H.'
fort'e e.ïBI t:léflRie 8ëron ses compmttmle8 f'ectangulaif"efl F1!l)Ft! el F$'
la grandeur de la forœ F est obtenue comme suit:
Il ;;;v'F~+ F! +
F!
Les cosinus directe\ll'S de la ligne d'action de F s'obbennent par les tn:presslol1S
mathématiques suivantes:
cos
.il.
V,
~
F:t.
::1_
fi
F
cos 9.y =....!L
Ir
F.'"
F
~~-'~
,,""'.,
tJ
_
Itt riilit,llante de deux fo1!"C"eS 0" pltlS dans 1't!-spAoo,[lOUS rlevons
d'aoon) découlposer les forees selon leurs composantes J:ectangulaires. En additionnant
aIgébriquenlent ces composaates selon chaque ase, nom oJ.,tiendrons les œmposantes
Ru Ry et.~ de la force résultante. La gnmJeur et la directioo de ltï résU.hûote ~ont cal.culées
(')
Pflflr !/(Ît('rJJliuer
comme expliqué précédemment (problème résolu PR·2.8).
Copynghted matenal
1)
GOON
2.71
a)
b)
s
Rgure
2.72
P2.71 - P2.72
En vous référant
la flgtlf P2.ïl - P2_Î2. dérernunez .
les composantes selon les axes x. y et .; cl, la fore' de 600 N;
les angles Or, 0" et 0;; que cette foree Ionne avec les axes des x, y at .;.
à
En vous référant à la flgt,n~ P2_ïl - P2_72, déterminez:
les composaotcs S('IOll les nxes x, y et ~ OC la force dt:' 450 N;
b) les angles 0%, 0" et 0;; que cette foree forme avec les axes des x. y et z.
a)
v
2.73
L'('l\tréfllil~ du câble cO<l\.iaf r\E est attachée au bout du poteau AB,
lequel est soutenu par les haubans AC et AD. Sachant (lue le hauban AC supporte
une tension
1.1)
b)
dl' 120 N. évuluez :
les composantes de la force exercée par le hauban AC sur le poteau;
les angles (J~, 0'1et 8~que cette force forme avec les axes des x, y et z.
2.74 L'c:xtrénlil': du cflblt· coa~irtlI\E est attachée au bout du poteau AB.
lequel est soutenu par les haubans AC et 1\D. Sachant que le hauban AD supporte
une tension cl!' 85 :\, évaluez:
a) les annposantes de la force exercée par te hauban AD sur le poteau;
b) les angles Or. 8" et 0;; que cette force forme avec les AXesdes .1:, 'J ct z.
36"
B
:r
Figure P2.73 - P2.74
2.75 Ua disque C,!Sl suspendu au support D pnr les trois cibles AD. 80 et CD.
Langle que ces trois câbles forment U\'C,!C III verticale ((lXC des Ij) est do 300. Sachant
gne la. composante selon l'axe des x de la foree exercée par le câble AD sur le disque
est dt' 110.3 r'\. détenllillez:
a) la tension dans le câble rill;
b} les angles (l~.0'1 et 0: qUE' la force appliquée uu point i\ forme avec J JS
trots axes,
Un disque est suspendu au support D par les trois câbles AD, BD et CD_
T__;angl('quI" ces trois câbles forment avec la verticale (axe des !J) est de 300_Sachant
2.76
que la composante selon l'sxe des z dl' la force CXCrC(lc par 1\ câble BD ur le disqu
est cl • - 32,1-4 N. d(~t('n1Iitl 'Z:
li)
la tension dans le câble 1~/J;
b) les ungl('s Oc. Oy ct O~<.jue la lorce appliquée al! point B [orme avec les
trois
IL'(C •
2.77
Un disque est suspendu au support D par les trois câbles AD, BD et CD_
Langle que ces trois câbles forment uvee Laverticale (axe de-s y) est de 300. Sachant
flue la tension dans If' eâhle CD pst de 60 N, déterrninez:
a} les composantes de Laforce exercée par ce câble sur le disque;
b)
les angles 0,-<.0y et 0= que La force forme avec les trois axes.
FIgure P2.75 • P2.78
48
Un disque est suspendu au support D pnr les trois câbles AD, BD et
CD_ L'angle que ces trots câbles forment avec la verticale' (axe des y) est de 300.
Sachant (lllC' la cornpo. antr- scion l'Axe des x dr la rorœ ('xcrc(i(' par le câble Cl) sur
le disque est de -20,0 N. détermmez:
il)
la t{'usioll dllllS If' ciiltl(· Cl);
b]
les angles 8•. 0'1 el 0,,- que la force appliquée au point C fonne avec les
trois axes.
2.78
2.79
Déterminez
la grandeur et la direction de la force
F = (260 ~)i- (320 N)j
2.80
Déterminez
+ (800
P,oblèmos
N)k.
la gnuldcur et la direction de la force
F = (320 l\')i + (400 N)j - (250.
)It.
2.81 Une force agit à partir des origines d'un système de coordonnées (x, IJ. z)
et selon IIn(' direction d~finic pllr le angles Olt "" 69.3° et 0: = 57,9°, Sachant que
la composante 'J dt· cette force est de -174.0 ~. évaluez:
a] l'angle 0,,:
b) les autres composante cl ln grondeur de la force.
VII(' force agit à partir des origines d'un système de coordonnées (x. 'J. z)
et selon une direction définie par les angles 0, := 70,9" ('1 0" .. 144.9". SUCh(Ult que
la colnpo.sallt(':. de c('ttf' forcf' est de -52,0 N. évaluez:
2.82
(1)
l'anglr 8~;
b}
I('~ deux autres eomposautes
et la valeur de la force.
2.83 Une force F de' 230 N agil aux origines d'un système de coordonnées
(x. 'J, z). Sachant "lue O. - 32.5°, Fy = -60 N cl F; > O. déterminez:
a) les composantes F. et F!;
/,) l 's angles 011 t'I 0;.
'1
2.84 Um- (01'(;(.' F de 210 N (lgit aux origines d'un système de coordonnées
(x.y • z), Sachant que J:. = 80 N. O~ = 151,2" et F!J < O. déterminez:
a) les composantes F'I et F:.;
1)) les angles O. et 8y.
.....
/"
2.85
Un plateau rectangulaire est supporté par trois câbles II"I qu'illl'str~ h 18
figure P2.85 - P2..86. achant que la tension dans le câble 1\.8 est de 408 N. déter-
3GO
minez les composantes di;' cette force uu point B.
2.86 Un plateau fl'ctanguhllre est supporté par trois câbles II'I qu'Illustré à la
figure P2.85 - P2.86, Sachant que la tension dans le câble I\D est de 429 N. déterminez les composnntes <Ir c('ttc~ Iorce IlU point D.
2.87 Une tour d(" trunsmission est tenue par trois haubans ancrés à l'rude des
boulons B, C et D, Sachant f]1If" la tension dans 1~ csbt . AB est de 2100 t\, évaluez
les composantes
(jUP
cc>tte force applique
(Ill
point d'ancrage B,
2.88
Une tour de transrnissiou est tenue par trois haubans ancrés à l'aide des
boulons 8. C et D. Sachant que la tension dans le cible AD est dc' 1260 N. évalu Z
les composantes quI' cette force applique 811 point d'ancrage D.
Ij
20111
~
Figure P2.87 - P2.88
Dtmenstons en mm
Figure P2.85 • P2.86
49
50
LI
alatiqu. ~
Larmature ABC est supportée par le cable DBE tel qu'illustré à la
Ilgllrr P2.89. 1.....cable DBE pa.~se dans l'anneau B. dans lequel on suppose une force
dl' riction tlulle. Sacharu que' la tension dans le câble est de 385 N. déterminez les
composantes dl! la force' exereéc prir 1('câble sur le point D.
panICuleS
2.89
r
IJ
510 mm
-•
600 mm
FIgure P2.39
2.90 l'our lu situation décrite au problème 2.89. déterrninez
de lu force exercée par 1(' câble sur le point E.
les composantes
2.91 Évaluez la grtmdeur et la direction de la résultante des deus forces illustrées l't la figure P2.91 - P2.92, sachant que P = 300 N et que Q = 400 N.
!J
Q
!J
Je
lJilllf'11sions
4()(1
&:11 111111
.
•
Figura P2.91 • P2.92
É\I",ùucz la grllolk'ur Cl la direetlo« de IIIrésultante des deux forces illustrées à La ligure P2.SJ] - P2.92. sachant que P = 400 N et que Q = 300 f',1.
2.92
2.93 Sachant que la tension est de 425 N dans le câble AB et de 510 l dans
le cable AC. déterminez la grandeur et la direction de leur résultante au point A.
D
8
/
•
~
.r
2.94 Sachant tlue lu tension est de 510 N dans le câble AB et de 425 N dans
le câble AC. déterminez la grandeur et la direction de leur résultante au point A.
C'
/'
/""
Figure P2.93 • P2.94
2.95
En vous référant aux données du problème 2.89 et sachant que la tension
dans le câble est dt> 385 N, déterminez la grandeur el la direction de la résultante
d\"s forees exercées par 1('câble sur Je point B.
C p n
2.96
L'extrémité du câble coaxial AE est attachée au bout du poteau r'\B.
lequel est soutenu par les deux haubans AC et AD_ Sachant que le hauban AC
supporte une t<>nsiondt" 1500 N et que la résultante des forces appliquées au point A
par les câbles AC et AD doit se situer dans Je plan xy, évaluez:
a) la tension dans le câble AD;
b) la grandeur ct la direction cie la résultante des deux forces.
2. , 5 Êquitbre d'une parUcl,lle
danr.I'npace
(30)
51
2.97 I-,-e;<I-~fllité du câble coaxial AE est attachée au bout du poteau AB.
lequel est soutenu par les deux hall bans AC cl 1\0. Sachant que 1(;'hauban AD
supporte une tension de 1250 ~ et que la résultante des forces appliquées au point A
par les câble AC cl .-\0 doit sc situer dans le plan xy. évaluez:
Cl)
la tension dans le câble AC;
b)
la grandeur ct la direction de la résultante des deux forces,
IJ
A
Figure P2.96 - P2_97
référant aux données du problème 2.85. évaluez Les tensions
dans les câbles r'lB et AD sachant que' la tension dans le câble AC es!' de 54 N et que
la résultante des forces nppüttuées par les trois câbles au poiut A doit être verticale.
2.98
En
VOLIS
2.15 É.QUILIBRE O'UNE PARTICULE DANS l'ESPACE (3D)
NO'lS avons vu à la section 2.9 qu'une particule A est en équilibre si la résultante de toutes les forc.:es agissant sur elle est nulle. Or, les relations 2.31
définissent les composantes R'I(,Ry et R; de la résultante; en les annulant.
nous pouvons écrire
(2.34)
Ces équations expriment les conditions nécessaires et suffisantes à l'équilibre d'une particule dans l'espace. Elles permettent de résoudre les situations d'équilibre d'une particule lorsqu'il n'y a pas plus de trois inconnues
en cause.
NOliS procédons en traçant d'abord le diagramme du corps libre. sur
lequel ngu l'en 1 la particule en équllihr • î},11I81 que toutes les forces auxquell ,-.
elle est soumise, Nous écrivons ensuite les équations d'équilibre 2_34 et nous
les solutionnons, déterminant ainsi les trois inconnues. Dans la plupart des
cas. ces inconnues correspondent (1.) aux trois composantes d'une force
unique ou (2) à la grandeur de trois forces dont l'orientation est déjà connue.
Copynght d ma nal
lOm
/"1 C
PROBLÈME RÉSOLU 2..9
Un cylindre de 200 kg est soutenu par dE'lLX câbles AB et AC attachés à la partie
supérieure d'un mur vertical, Sous l'action d'une force horizontale P perpendiculaire Su mur, le cylindre prend lu position indiqllk'. C.ttlculC"'tlu vulrllr de P Cl 1ft
tension dans chaque câble.
P
20]
SOlunON
/l C
lO ln
Di(lgs'(I'u"" du (IIrp~ Iihr« (1)( 1 ) (le" forl f\. En choisissant le point j\
comme point d'équilibre, on note qu'il est soumis li quatre forces. dont trois sont dé
grandeur inconnue, En utilisant J'approche vectorielle, avec les vecteurs unitaires
i,j et le, on décompose chacune des forces selon ses composantes rechmg111ai.res, d'où
8m
Bt'::
--f
l
T
.
,\If
Il
..
1.2 m
\V
-•
P = Pi
\V;;;; -mgj = -(200 kg)(Q,81 mls2)j
:r
= -(1962 N}j
( 1)
Dans le cas des forces TAB cd TAc. on dérenniuo les C()lnpOS311ICS et les grandeurs
-,
des vecteurs .4..8 et I\C, En identifiant par À;4.8 lé vecteur unnaire selo .. le sens AB,
on peut écrire
-
_.+ (10 m)j + (8 nl)1<
m)j
AB .... -(1,2
À'l8 ;;;;
TAO
= -0,0933Oi + 0,7775j + 0.62201<
::
12, 2m
== TII.8ÀA8 = -0,0933OT,lIli + O,7775TAn.Î + O,G220T"nk
On procède de la même manière pour
d'où
AB = 12,862 m
-
-.
l ~~
À,\C,
le vecteur unitaire selon le sens AC,
AC'= -(1.2 111)i + (10 tn)j - {LO01)1<
ÀAC
Tj\c; ""
=
T"CÀf\C
4,
== -O,0845.'5j + O,-046j - 0,7046k
(3)
O,7046TACk
Étant donné Cjue1'\ est en équilibre, alors
T..\IJ + T....
c +P
IF = 0;
.AC:: 14,l93 ln
= -O.08455TAcl .; O.7046T,\cj
cl'l·ljuilnllt.
('olldil;OIl
m
(2)
+W=0
En remplaçant les expressions des forces par les équations I, 2 et 3 et on mettant on
facteurs les vecteurs unltaires l. j et k:
(-O.09330TAB
-
O,084S51'Ac + P)i
+ (O.77751~\B + O.704.6T,\c
- 1962 N)j
+ (O,62.20TAB
-
O.70.l6T,\c)k = 0
En flxant les coefûctents de i,j et k à zéro, on écrit les équatlons scalaires suivantes,
qui exprtment que la somme des composantes selon les trois axes des
l',
!I et =- des
forces sont nulles :
(kF~=O:)
(IF" = 0:)
(!F: = 0:)
-O,00330TAll - O,08455T,\C + P = 0
+O,7775TAB + O,7046T,lc - 1962.''1/ = 0
+0.62.201:\B - O.7046TAC = 0
1 \1
52
'1 le -
12'3) ~
Nous avons vu dans le cas des forces coplanaires (lue la résultante des forces agissant sur
une particule en équilibre doit nécessairement être égale à zéro. En appliquant ce
principe d'équilibre dans le cas d'une particule dans lin espace tridimensionnel, nous nous
retrouvons devant trois relation.s exprimées à l'équation 2.34.
Nous procédons alors selon les étapes suivantes.
Tracer tlU diagranune du C(J'1)H llhre (1)(:1.'. Ce diagramme illustre toutes les
forces agissant sur la particule en équilibre. Nous devons indiquer sur le diagramme la
grandeur et la direction des forces connues ainsi que tout angle et toute dimension
permettant de les déduire. Les forces inconnues (soit en grandeur et/ou en direction) sont
identifiées à l'aide de symboles appropriés. Aucune autre information ne doit apparaître
sur le DeL.
1.
2. Dëcompoeer ICH Jorc(·,. en romposante« '·(·(·ltllll!lIl"irt·s.
POlIr chacune des forces
en présence F. nous devons identifier le vecteur unitaire A définissant la direction de la
force et exprimer cette force comme le produit de sa grandeur F par Je vecteur unitaire A:
F
=
FA = ; (dJ
+ clyj + (}.:k)
où d, dx. dy et cl:. sont obtenus par le <liagramme du corps lihre.
3. Fixer 10 réHt,lll,n/e tle« JO 1'<.'('."1 ct ;:..(:,.(). En fixant la somme des forces appliquées
à une particule à zéro, nous obtenons une équation vectorielle définie en fonction des
vecteurs unitaires i.j ou k. Pour satisfaire la condition d'équilibre, le coefficient de chaque
vecteur unitaire doit être nul. Nous nous trouvons donc devant un système à trois
équations. qui pourm être résolu s'il ne contient pas plus de trois inconnues (problème
résolu PR-2.9).
53
C p n
y
2.99
On utilise trois câbles
figure P2.99 - P2.102. Déterminez
pOlir
ancrer lin ballon
la force verticale P
311 sol Ici
qu'illustré à la
Cl(~rcét) par
le ballcn (lu
point A, sachant que la tension dans I~ câble AB est de 259 N.
à la
figure 1"2.99 - P'2.I02. Détcrmtncz h. forcf' \lC?rtiC1lI.~ P e~('rc~(" par 1(' hallon au
point A. sacl.llUll que ln tenslon dans te câble ,\C est de -141 .
5.60
III
2.100
On utilise trois câbles pour ancrer tin ballon au sol tel qu'rllustré
2.101
On utilise trois câbles pour ancrer 1Jn ballon ail sol tel qu'illustré à la
figure P2.99 - 1"2.102. 1)~t('nnin("1, la forCt' verticale P exercée par le' ballon au
point A, sachant Clue la tension dans If:'câble AD est de 481 N.
2.102
On utilise trois cibles pour ancrer un ballon au sol tel qu'illustré à ln
figure P2.99 • P2.102. Sachant que la force verticale P exercée par le ballon au
point A est de 800 N, déterminez Latension dans chaque câble de rétention.
Une caisse est supportée par trois câbles tel qu'illustré la 6gure 1>'2.103·
P2.106. Déterminez le poids de la. caisse, sachant que la tension clans le cable AB
est de 750 .
2.103
à
Agure P2.99 • P2.102
v
._
B ...........
....
320
/
r./
•
,,-u
.-'
_1
x
1)1f 1.1t"ll.~Cln~
fOU ".".
Figure P2.103 - P2.106
Une caisse est supportée par trois câbles te>l(III'ilIustré Ala OgllfC P2.103P2.106. Déterminez le poids de la caisse. suchant que III tension dans le câble AD
2.104
est de 616 N.
2.105
Une caisse t'st supportée par tn)is clil,lt's ('1 qu'illustré à la Bgure 1~2.103P2.106. Déterminez le poids de la caisse. sachant que la tension clans le câble AC
est de 54-4 N.
54
2.106
Unc caisse de 163 kg est supportée pnr trois câbles tel qu'illustré à ln
flgur P2.103 -1)2.106. Déterminez la tension dans chacun des câbles.
2.107
Trois câbles SOIlI 1'(·li\~sli·1 C'l'lïllllstrf à la f1~lrf' P2.IOï - PZ.lOB. Les
forces P et Q sont appliquées ail point .4. Si Q = O. déterminez P sechant qlle la
tension clans le câble AD est de 305 N.
Prob ('meO
55
'1
220
111111
câbles sont reliés tpl CJII'iJJlL~tréà la figure P2.107 - P2.10S. Les
forces P et Q sont appliquées au point A. Si P = 1200 N, estimez l'étcndur- des
valeurs possibles do Q sachant CJIIC If' câhle f\D est sous tension.
2.108
Trois
2.109
Une plaque rectangulaire est supportée par trois câbles tel
C)IJ 'lllustré
à la Ilg1lrf' P2.1 09 - P2.110. Sachant que la tension dans le câble 1"\(; est tic'
fi()
960 mm
•
évaluez le poids de lu pleque.
.
320
1
\
111111
2.110 Une plaque rectangulalrc est Stlpportèe' p'\r trois câbles tel qu'illustré
à Lafigure PZ.log - P2.110. Sachant que la tension dans 1(·('fible ,\1) ('sl de' 520 N.
évalnf"z le poids de la plaque.
\
\
C
y
Q
OC)!) mm
Figure P2.107 - P2.108
l)illll'r.~iOIlSl'n
n'Ill
Figure P2.109 - P2,110
Une tour de transmission est tenue par trois haubans au point A ct est
ancrée aux points B. C et D à l'aide de boulons. Sachant qlle la tension dans I~ câble
i\B est de 840 N, déterminez kt lorce verticale P appliquée par la tour au point A.
2.111
2.112
Une tour de transmission est tenue par trois haubans (III point A ct est
ancré!' aux points H, C et D à raide de boulons. Sachant que la tension dans le câble
AC ost de 590 N, déterminez la force verticale P appliqué ' p~u' la tour au point t\.
i\
20 ln
-x
Figure P2.111 - P2.113
2.113
Une tour de transmission est ltlllllr par trots haubans ail point A. Elle
est ancrée aIL'\: points B, C et D ;1 l'aide de boulons. Sachant (111(' la tour al}pliqul'
UIIl' force P verticale vers le haut au point r'\ de I800
" déterminez la tension dans
chacun des câbles,
Copynghted ma rial
56
la statlquo des panlcu-es
2.114 Un disque horizontal dont le poids est de 6()(} N est suspendu au point D
à l'aide' de tmis câbles (n(!llf'f' P2.114). Chaque eâhle form(' avec l'axe vcrncal y lin
angle de 31.r. Évaluez la tcuslou dans chaque câble.
y
Figure P2.114
rt:r~rlll1l ft la plaque rc·ctangulairY' des problèmes 2.109 et
2.1141, ~vf,tllll'/ la tension cie' C'hIl(jIJ(' ('ilhll!, sachant '111e' la plaque pè'Sf' 792 i .
2.115
F:n
"OI1S
Pour le sysl<'nlf' dl' câbles des problèmes 2.107 el 2.108, évaluez lu
tension dan (·haqllC' câble, sacharu que P :; 2880 N et Q ;: O.
2.116
2.117 Pour Il' Sy'tl'Illl' de (..'âbl(·sdes problèmes 2.10ï et 2.108. évaluez la
tension dans c.:t.<Itplt' câble, sachant q1le P = 2880 r\ et Q = 576 N.
2.118 Pour lr- sysl01llC de ('i1hlcs des prohlèmr-s 2.107 et 2.108, évaluez la
tension d~U1S chaque cûble, sachant que P = 2880 N et Q = -576 N (Q orientée
\ ers If' bas).
2.119
au déciJ.argclIl,'nt
l('UStOIl
raidI" d'lin
d·U.lIL·
C'I cil' deux câble-s, deux opérateurs procèdent
fVIIW de ~ l,5 kg (ngu,'1:' P2_ L19). Dëternunez la
C'\lllVO_Vf'1I1'
pivt.'(.·
t'II
dans chaque câble. sachant que.': à ce moment précis I~ pièce est en équilibre;
les peints 1\, B ct C; sont respectivement aux coordonnées (0; -0.5 rn , J m) pour A,
(-1 III ; 1,25 m : 0) pou,' 8, (1.125 rn; 1 1.1'1; 0) pour C; et que les forces dues nu
frottf'n1t'nt sont nulles. (S"gg",stion: pour ('Ptt(' slruation, SllpposFl!]ur la force ap[lliquéc par Il' CUI1\oy('ur sur lu pièce est perpendiculnlre IlU convoyeur.)
2
III
Flgur'e P2.119
C p n
Problèmes
2.120
Résolvez le problème 2.11 9 en supposant qu'un troisiême opérateur
applique une foree P = -(160 N)i sur là pièce.
2.121 Considérez la figure 1'2.121. Le conteneur pèse \" "" 1000~. 1,(' câble
AC est attaché au plafond au point C et au conteneur par l',U11I(.\I\I A. Le eâhle i\E
est attaché au plufnnd .111 point E t'I pusse p:tr l'anneau A. Un troisième câble AD
est attaché au plafond au point D; il passe aussi par l'anneau A. ensuite par la
poulie B et une force P lui (' t appliquée ail point F. Déterminez la grandeur dt:' P.
(SlIggestion: pour cette situation. supposez que la tension dans chaque l'clion du
câble FBf\D est la mêrne.)
0,-10 rn
-•
0.-10 rn
1.(",0 III
'"
Figure P2.121
En vous référant à la situation décrite au problème 2.12J. ~iln h..nsion
au câble AC est Je- l50 N. évaluez:
(1) la grandeur de la force P;
b) le poids \V du conteneur.
2.122
Un conteneur est suspendu par l'anneau !\ tel qu'lllustré il la IIgun.'
P2.123. Il est soutenu par 1(' câble BAC, passant par l'anneau A ct ancré aux poilltl>
B et C. Dellx forees P = J'j ct Q = Qk sont appliqué€'$ pour garÔf'r 1(' conteneur
dans sn position. Si J(' poids du conteneur est \V = 270 N. détenuinez P t't Q.
(Sllggl;~tjOll: pour cette situation, supposez que la tension est identique d.IIIS les
dClL'I; sections du câble BAC.)
720
Dlmen ,101\\
('11
nuu
2.123
En "OIlS r~r~r.mtà la situation décrite au problème
minez \ v ct
sachant que Q = 36 N.
2.124
r.
Figure P2.123
Ij
2.123, dérer-
Les deux manchons t\ et B sont reliés À un Ill métallique d'une longueur
de 52.5 mm Les deux manchons gliS5l'lIt librement tt·1qUt· pn~,l'Illt~ à la figure P'2.125.
Si IIllE' force P = (34 1 N)j est appliquée sur le manchon /\. ('V::tllll~(:
a) la tension sur le fil si 'J = 155 0101;
b) la grandeur de la force Q II~S ajl'(' polir gardC'r 1('système en t~qllilibre.
2.125
2.126
SollitiollJ)("'1.1(' problèrne 2.19.5 en supposant
Ij =
275 mm.
Figure P2.125
c
57
nous U\'OIl~ c!hllHé t'.-flet dl: f()rt.'t's appliqnl~l-s il (les particules. c'est-à-dire il des (.'{)rps dont la [onJ1C pt la laille Sf' raPI)l1lCh('1I1 cie
celles d'une particule , les forces agiss.al1t sur ces <:orp'i peuv eut donc €-Ire
considérées comme avant le même point d'application.
DWkS (:(.. chapitre,
Résullante de deux rorces
LA's forces SOIlI des
IJo/t!'1 (/'(I}JJJJiclifirltl,
A
FIgure 2.35
\ Composantes d'une force
.... .....
.....
selon la "èg/t' lJ~1paralll..tiogra,unu' (l1gurL 2.3.3), Lu grlllldL'llr ct la direction
Ùl' ln résultante Il dr- dt'IIX forces P et Q appliquees à une particule PCII"Cllt
être déterminées Wdpluljucllu.'l.lt ou par trig()1I01l1étri(!. avec l'utilisation SUL'eessive {I~fa Ini dl.......inus et dt' la Ini df''i cosinus (problème résolu PR-2.1).
Touffe! r('r<'~.11'pli'luée à 1111,..particule lipnt (ltrf' dé('~lIJIP()sét' selon dt'll\
CtnU})().4!flntl·.'/
011 plus. c'est-à-duc ([llj ~1It' peut (\t'rl' rt'fuplul'C'(" par (Iellx
lorcr-s 011 pl us aytlnt If' 1nême eflet sur III purüculc Nous PUU\OIUi représeuter 1I1l{' force F pur Ùf->ILX composantes P et Q en traçant lin parallëlo$<1111m(:>t1~71llt ....
' cnrnnu- ôlagol1<lle; les composantes P cl Q correspond. 'nL
aux deux côlé~ tldj.tl'f'lIts ttu par.illplograullllt' ((à~ure 2. 3n) (,t pt'lI\ t'nt être
déterminées grnplllqU('nlC'flt Olt par trigonometrie ( cclion 2,(j),
............
........
ite.. crctnrielle«; E"1I...s se ('ari1ctél;s~l1t par lin
une ~rlH,dtur ct une dtrectlou. Ell!!., s aùd.itiOlllll'lIt
(lili/III
....
Figure 2.36
Composantes rectangulaires
Vecteurs unitaires
Une force F peut être décomposée eu deux co/uPos(/u(es "f!ctatlf!.tJlnlr!!.S F,
f" F" st-Ion les axev des coordonnées perpendiculuircs (figure 2.3ï)
En
intrcdulsant les cccteurs rltlfl";'l~ i el j selon les axes x (.'t Y le:o.r,~){·li\lment,
nous ~t'ri\OTl" (sf'{.·lion 2. ï)
Ft = l:~i
'1
}'"j
F"
(;2,6)
F = F~j+ F"j
et
où F;( et FI)
sout
les
(·OIlI/J().\(/lfte.\
(2,ï)
sculaùv«
de F. Ces
cruuposanres,
poSiti\ es ou négati' es. sont déllnics par 1('5 relations
F'1 = F sin
j
i
F1 =J' 1 i
x
(2 ~)
(J
Si nous t'OWIai.SS(lIl~ Il S t'()UlpOS:lnt{. ~ rt'ctangl1lair("s ''", l't ""( d'une
forer- F IIUII<:obtenons l'un~IL' 0 qui cll'fillit sa direcliuJl Cil écrivant
Figure 2.37
tan
fo'
1:)
= :....!L
(2.9)
F,
1-:1 grandeur (le la UJI't.'l'F s'obtient t.'1L isolant F dan.s "UIH' des équntirms :2.5
ou ( Il appliquant le théorè"lllt .. (It> P)'thagort:'
/: = \. ~, + F'Il
Résultante de plusieurs forces coplanaires
(2, l ()
Quand trots force.'! coplanaires 011 'Ji!J' a~s'S(.'nt sur une particule, nous
ol)lt 'rlon' Ips coruposaute-s rt>('hkllJ..fl.llaifl.'S de leur résultante
R l'fi additionnant algébriquement leurs composante-s r{·t.:lwl~lIl:li.n-, corresporuluntes
(section 2,h) d ou
,. L
R t -- _rI
12.]3)
58
C P
1
Rés.umé • Chapitre 2
La grandeur ct la direction de ln résultante R }lt'u\.cnl ensuite être déterminées à l'aide de relations shnllmres aux éfjuatlous 29 (;>t 2.JO tpreblèmo
résolu 1'1,-2,:3),
U ne force F <\gis..,ant clans l'espaCi.
Sf>lOI)
~I~"CUnlp!lS;1l1tf'1i Tt'Chu)~lIlairl""Joi
Î1nut par 0,.
o., f'r
Il' • F'I
et
0;; les all~lc>s f()l"ll1('!i pHf F
donnée .. x, y et z 1flgll re 2.3K), llOUS UVOllS
1~
= F cos ().Y
'1
F,t - Ji' cos 0,
peut
t,-id,.II,ru,I,/vlltud
F
Forces dans l'espace
2_121. Eu i(lellti)ps trnis ;1\+'S dE'~ coor-
(!)c<-tion
<1"('('
F~::::F
y
8Utl cLécoU1PO..,î!C
59
(..'1JS
Or.
~2.1~)}
'l
l'
V
x
l~
1
c
--
••
Figure 2,38
(a)
•
Les ooslnus dl' f4:. OU('J O~SOfÜ arl)cl~ It>
....rfl~~/I'/~tliTt:('t4"I"'> (1(, la J(,((,("' l'.
Eu iutroduisuut les ,('ewur.:. Huit~ùrt"s Î_ j e-t k "t']{}Jl Jt>s uxes (1f'('fxJrcluIlllét"\_
,
rcl
Cosinus directeurs
,
'J
nous eenvnns
F=Fi+FJ'+Pk
\
'1
.fi' =
ou
p(<.,'()s
l2.2UI
..<
8 i T cos O"j + cos e.k)
1221)
t
Ct'tte denUPTI.:: ~41latioll dpJllolltre ({J~ln'e2.:1~)}(11l~F eorrespond HU prrxlutt
de sa grtIlldf'tlf F par Il' 't'Ct4 ILt unitaire
J
Puisque la gnu.Hlclu· dt-' À est (·~.tll' 11l'unité. I\"l)ress\(lu tligolullnphitlllC
suivante doit Ctrt' rcsp~'ClA~t':
"'Il
"Il.
"l
l'OS~
Il, 1- l'tJS- u
- èOSt,.
=l
"
$i nou-, COl1lltUSS()rlS lt'"s N)lll!)()!';LlIll'"'i Il'('litl\)..'1Ùttin-" F;
Foree F. la gnu):d,cur F dt, J,. lorce ]lt'ut f.lrt.' eulrulée l)'U'
J", ct
,,- + F"
......
J' = '\ 'F"~-+ F"
IJ
.t
ltss (.'u:;inu.s (liJ'~(.t""f1ITh<If' F :-.nut ohtf'on,
avous donc
F,
P,lI"
(-·tls
IJ
=-
Il
C{lS {J
Figure 2.39
y
(2,18)
-1
<;>t
ï--
i'~<)'1I"lle
les
--
('(11Jatioo" 2.19.
\OllS
r.
F
Quaud une lorce 10" a~bsant duns }'CS-P,lCC trtdtmr-usionnel
est
(lé6'1,1t· J')ur Sol gr.llIÙt'llr Ii' ~·tr)ar Ùl'Il.\ puitll'i 1.1 l't .\' \llf "~I li~lH'd ,u't1{lrl
(section 2,13), 1)0US obtenons '''''\ l'CJU1!X)SHUll'<; 1'("Ct~ul~llJtlil
C\ (;OUHue suit.
,
NOIl" e Trilnoll~ (l'ftl)of(llc~ vecteur JI,\' .iOi~Uitlltles llohlt-. .\1 et .\ plO' "es
composantes (l ... d!! ,t (1_ 1 fig11TC 2.-10). ù'où
-
-..,
"rlo\' =
(J\
i + (1!Jj + (,-,k
o
(2,26)
-
Figure 2.40
Copyng ted n atenal
60
la s[aull·HJ (lu l'il.!
1 \J
'
ensuite le \t·t'tt'lIr unitain- A selon 1<1ligJll' (l'action cie F
en ùh isant .\1.\' raI' \u grall(lt'ur J/,\' = d..
~OI1S c}étt'nninolls
À
=
.\1.\'
.\[l\
1
= -, (tIti
t
+ (/11j + (I.k)
Sachant (Pit' F est fgalt' au pf()(lliit (lt' f: par
F = [,'A
11
=
À
~2.2ï)
nous avons
F
-(cl i Î ,1 J' + ri k 1
(2.28)
d ""
l'
rc~,,()llIs PI{.2, -;- pt P Il-2,~) les composantes
(prohlèuie-s
scalair ..: de F sont, rcspccüveuu-nt,
"'1:11SlIÎI '(lit>
F..::;
'/
1<' = F'(/T
\
Resultante de lorces dans l'espace
(1
F',/y
cl
F.. =
F(l_
(1·
Quand (leux [oree» 011 plll\ agis~L'nl sur une particule dans l't'Spacf'
trltlilll('/I-<iiollrll·l,
nous obtenons les vomposantes rectanaulaires cie leur résultante R en ndditiounant aJg:ébriclut -uu-nt It" Ils t'(}UII>oSftlttt·\ CUITt'~I>()Il(LU"Ites
(section 2.14), d'où
R .'f
-
"L
-
R- -'\F'
- ....
_r).
--
l2.31)
La ,~TaIlJI'\lrpt hl direction df' R sont ensuite !lhtt·nlH:·S par tirs équations
semblables aux ~4Ilati()n~2,) ') et :2,:15 ipl''f)hl~rllt' résolu P R-2.A),
Equtbore c:fune parùcule
D aoramn
Il;.!
du COI ps fibre
Une particule pst en (:(l'liliIJre quand ln résultante
dt' toutes les forces
a~sant sur elle est nulle (section 2,8) Dans Cl' cas, la l)artieule Jt'IIl('urt' au
Tt'P()\ SI e-Ile fta,t inltialerueut au repos ou "l~déplace à vitesse constante el
en li~lIt'
droite 11; elle ptait lnltialeuu-nt e-n mouvement tsecticn 2,)0),
Pour résoudre un l)[oblèulc iinpliquunt une particule t'ri équilibre,
nous commençons toujon ,....par tracer le (liflf!_rflOlllu (Ir, corps llbrc pour la
particule en incluanl toutf'S les for('t's a~jss<lnt ..ur elle (section 2.1l), Si
St'U/CtH.l'1I1 t rois force!> coplanaire»
a~issl'Ilt sur lu particule, nous P()ll\'UTL~
trace-r 1111 triflllglc (11'<;fi)rrl"~ pour exprimer 1"'~cII1Jhbr{'dl." la particule Ct'
triangle peut être résolu par la méthode gr"d.rhiqlJ~ ()11 par triJ!;Clnornétrie.
en autant qu'il n')' ait pas plus dL'deux inC'()I1HUeS lproblèrllt' rés(111I PR-2.4),
Si ),Ius d,' t,.Ol.\ forr," cOJl/nlltlirl"\ sont l'li l)ré~t"II('1• rmus IItiiisons les (.\(111<1lions d'équilfbre
1.1-' = ()
(215)
\
Ct'S ~(IIl:.tLions Pf'lI'·f"ut êtn- ré 0;01Iles IlOllr clf'll" tnconnues
(problème résolu PR-2,6,1
Équilibre dans 1espace
ou 1110ins
une particule t'Il éq« iltbrc (/(111\ 1'(!\JlrlCC t ric!il1lellsiollTlE'l
(section .2,15l, nous nli,!J'\()lIs It's l'Cltl:ltic)ns d'équilibre suivantes
Pour
_"1'y -
0
(J'lt~ l'on pelll résoudre il condition
(problème résolu PR-2J)),
(2,34)
d'avoir trois inconnues
ou J110ins
MOTS CLÉS
CompO"lIl1té n.'t.:bul~ul..ire
CUlld.l1Ull d'equrhbrc
l)iu~allllne ou schéma
du corps libre DeL)
Dia~ranllni'
011setH"nra
, de point isolé
Equation vectorh-lh-
Résultante
Forces concourantes
Foret-s coplannm-s
Forces spatiale-s
Trinnzle d" forc'('s
Lois de Newton
~",tlllldl' du poIYl!ulI('
\ vct 'UN opposés
Vecteurs unitaires
Méthode d .. 1riall~I[,
,
I{è'gll' llil pilr.Jh;l~~r"IHII!l'
\ ('l'tl'lIrs
t-qlupoUonts
...
PROBLEMES
,
SUPPLEMENTAIRES
,---...
600
111111
----1-1
8
2.127
Deux câbles sont liés ail point C. où une chaJ"~f' Q de>480 N ('st a11pllquée. Sachant 'lu~ P = 360 N Il ce point, d~l('rlnin.'7.:
,\e ;
a)
la tension da.lls lr- l'âbll'
l,)
la tension dans le câble Be.
c
Deux câbles sont li~s nu poillt (:, Il,1 cJoïllllslr(o à lu figllr(' 1'2.127 P2.12.8, oit une charge Q cl!" 480 N est appliquée. Déterminez l'étendue des valeurs
de P afln dl' tenir les deux câbles sous tC'J)!liCII1.
·1
2.128
Q
480 N
Figure P2.127 - P2.128
li'
Figure P2.129
2.129
Cousidérez la llgurt' P2.121J. Sachant {Ill{' l'tulgle entre les deux Iorces
de 75 N est toujours rlf· 50" mais qllt" l':luglr a pp"t varier, déterminez IR ",,1(,111'de
cr pour laquelle IH résl11tautl' dl' l'euscruble des forees agissallt sur J\ l'si orientée
horizontalement
vers la gallchf'.
Une force est appliquée l'origine d'un Systèllll' de coordonnées (x.!J.;;;)
dans tille di!1.'(."l:{on correspondant auv tlnglC's ~'1= 551) ('1 (J. = 15". nchnnt que ln
composante selon l'axe des x de la force est de! -5()() N, déterminez :
tI J
les autres composantes et 1.1 grandeur df' lu force;
b) la \'lIll'lI r dr fl~.
2.130
à
Un conteneur de poids \\' = Ll65 ~ est soutenu par trois câbles tel
qu'Illustré à la flgurl" P2.l31. Déterminez la tr-nsion (Lans chaque clihl('.
2.131
y
(,OU
111111
Figure P2.131
extrait un pieu ('llfoll('t~ dans k· svl il I\tid.· dl' clc'"x conk-s 1('1
qu'illustré Il la fj~lIre P2.132. Disposant des informations sur rune des forces. évaluez
la gralldeur et la direction que dcvmit avoir ln Iorce r pour qU(' la résultante des
2.132
011
deux forees soit de 160 N verticalement
vers le haut.
Figure P2.132
61
C P
1
62
L~ stet que nes
rlln cules
2.133
IOllgu('"r
'.1
En VOliS réfC:rëlnl .) ln I1glltl' P2:.133 ('1 sachant que le câble 1\8 li une
dc' 13 ru R\('(: 1111(' lC'llsÎolI dl' 3900 • dt"'lC'rnliu("/':
a) les composantes selon x.!J et z de la lorce exercée par If' cible au potnt
d'ancrage B;
b)
la direchou cil'
('('Ut· [Of('('
exprimée par les aIl~les
(J'Z.
Og et Oz'
2.134 Deus câbles sont attachés au point C où une charge de 396 'N est
appliquée. Déterminez :
l1.201
Cl)
la tension dans le câble .-\(;;
b}
ln renslon dans Ir çâblc~ BC.
8
.\
l
9 Ul
c
~.5
III
5
1-
121n
III
--+-
t..')
n1-l
FIgure P2.134
.t
Figure P2. 133
2.135
011 veut d~pJat'(_'r1111camion accidenté tel qu 'illustré il la figure P2.135.
Deux carnlons à R'1110rqUC (8 et C) sont mis à l'épreuve.
achant que les tensions
appliquées sont respecttvernr-nt nf' 10 kN dans Il' Cljbl(> AB C'l (1(' 7,5 kl\ dans 1(,·
('!iblc· I\r.. dc~t('nl1illcv, hl ~rulldl'lJr ('1 lu din'ctiOll
appliquées sur Il' camion (t'Il.\)
do la résultante
des fOrL'8S
l'llli
.K
!J
8 III
Figure P2.135
l
;5 ~
!J
Figure P2.136
2.136
ch'
400
IIIIU
(·lIat'III1(·
2.137
En
V()II~ n:ft"rant
à la f1gllrl' P2.136. déterminez
clc'~ rorc('~"~II présence.
Les deux manchons
J\ ('1 B sont 1'('1i~~pa r
les composantes x et Ij
un CHIII~talliyut> d'une lon-
guellr de 500 mm. Les dC'lI.A1I1nnc!tOJlSgli.:.St'lIl llbrcrucnt tel que présenté à la figure
P2.137 - P2.13R. Si une forœ Q dl' 60 est appliquée sur le manchon B. évaluez:
-Figure
-
r
P2. 137 - P2.138
Il)
I,)
lM h.·USIOII sur le III si x = 180 mm ;
la grnndeur de lu force P nN.'t"'ssnirr pour Knrtl('r Il' système en équilibre.
2.138 Les d('ll\ 11I1In('hol1~ ,\ (·t B sont reliés par tITI fil IllélaJliquf' d'IU'lC
longllC'lIr cI(, SOUnun, Les deux manchons ~lissf'nt librement tel 'lue: présenté à la
f1gul'(' f12.137 - 1"2.138. Si P = 120:-J et Q = 60 N. d('lc'nlIÎllcz les distances x et z
nft.'CsslIirc·$ pour conserver l'équilibre dl! ,,)'~tènlC.
pOliT fotn' ,()llltllllllll;~
L'~ plohlj'"I1'~ SIlÎ\.lIlt~ \0111VOIl\II\
1111 d'lllll
il
Prob'èmes sJpplllmen~3.lIl<;
1·:1td,·cil' l'nnlinuk-ur
63
(',l)('ulatnl'\' pr()~rdllllll.lhlr'
2,C1 Concevez lin pmgranlnl(, pouvanl calculer la gr:lndC'ur et la direction
de la résultante de n forees coplanalre appllquéos au poiut A. Appliquez I:'ns111[",
CC programrne pour résoudre les problèmes 2.32, 2.33, 2.,3.') et 2,38.
2.C2
Une charg~ ,) est soutenu!' par
d~'IL~
clhl("S lei
«llïllustré
à la ft~lrl' 1)2.02.
Concevez un programnle pouvant calculer la tension dans chaque (:âhlé pour
dilTérC'llteJ;\'UIl'l1fS dl? P et dl' 0, l'anglp 0 variant entre 01 = /3 - 00° et 8il = 90" - a.
avec des incréments dl" ûO. Utilisf'z
Cf'
progmllllllf' pour évaluer, clans les cas (1), (2)
et (3):
(1)
ls)
rninhualc ;
c'}
la tension dans chaque ~Îhl(.' pour des valeurs dt> 0 variant de 01 à O~;
ln valeur f}IlP doir avoir 8 pour qllf' la tension dans chaque câble soit
la valeur dé ln tension corresponduntc
( 1) a ::;:).1)0.
f3 = 75°.
F"
Figure P2.Cl
P ::; 400 N, ~ (J ;:: 5°
a .. 50°. f3 .. :3()o. f' = (100 N. ~ fi - J 0"
(3) â'" 40", {3 ,.. 60°, f ""250 N. 110 = 50
(2)
B
i\
I~
p
Figure P2.C2
2.C3
'rel qu'illustré
~lla
figure 1l2.C3. un fun::utlblllE.'
marche sur une corde
raide d'une longucur L = 20,1 ln, laquelle est attachée aux points A et B distants
cie 20,0 rn. LA' poids dt> l'acrobate incluant sa perche est dt> 1)00
1(.'poids di' lu cord"
(·t
tou((' clf.fonllnl
1.
En négligl';;uil
ion ctl,Il>licjllr. C'I)lll'C'V(':t, 1111 prIJgnHlIlI1('
el la tcnslou duns les Sl:('UCJlIl> AC l't Be de
permettant <1(' calculer la défonnaüon 'J
1~ corde, cl CC. ponr tirs valeurs dt' x de' 0,5
III
li 10,0
III
\'l1rhllll
par Inluc:h,:s
de 0,5 Ill. À partir des valeurs OÙICIiUE.'!), détermincz :
(1) la déformation (la Ilêche) maximale de la corde;
LJ) ln rcnston maximale dans la eorde :
c) les valeurs mintmules de tCI1sl01l dans Il'S sectlons :\C c'l Be dl' la corde.
incrëmentielles
A
('
•
f---X~
Agure P2.C3
Copynght d ma nal
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
montre les [orees externes appliquées au camion. Considérons tout d';ll,of{1
le poids du camion; bien qu'il englobe l'attraction exercée par la terre sur
toutes les parties (111 véhicule, on 1(>représente par une ["l'Col' unique W. dont
le point d'applicanon, celui où la foree agit, est le centre lie graL'ilé du camion.
IOUS verrons au chapitre 5 comment procéder pOUl' situer le centre de
!:.'T<1vitéd'un corps. U> pouls W tire If' carnkm vers le 11<1s et il entraînerait sa
chute verticale si le sol ne le retenait I)as en exerçant tes forees c]E> réaction
RI et B2 sur les points ùe contact. Ces forces, appliquées }Iar Il:' sol sur Je
camion, font partie dcs [orees externes agissant SW' le véhicule.
En tirant sur le cable, les hommes produisent une {oree {le traction F
sur le pare-chocs, qui tend ~ldéplacer le camion en lign(" droite vers l'avant,
Le véhicule sc met effectivement CH nlOUVCI111?lll puisque aucune foret:
externe ne S')' oppose. (Pour simpli Her, nous lléglig~oll~ iCi les force de
résistance au roulcment.) On appelle' ranslotto» le InOUVC1H'nt vers l'avant.
ail cours duquel toutes les parties ÙU camion restent parallèles à leur position
de départ, le plancher demeurant horizontal ct les parois verticales. D'autres
forces p(">lIventtransformer le mouvement: par exemple, la force exercée par
un cric placé sous l'essieu avant ferait pivoter le ean11011 autour de l'essieu
arrière. entraînant ainsi 1I1lt' rotation. Ainsi, chaque force externe agissant
sur
3.3 Prll'lC1Jle de Inmsnussibillé -
67
Forces équivalentes
Figure 3.1
Figure 3.2
rigiri(' peut, si elle n'e 't pas contrée, prO<:III'(>r au ('0'1)S une
translation. une rotation ou une cernbinaison de ces deux mouvements.
1'"
('()'7)S
3.3 PRINCIPE DE TRANSMISSIBILITE
,
.
- FORCES EQUIVALENTES
Conlorrnérnent <lnprillcil?r (If' frn'ISIIIÏ,<;sibilité, l'équilibre ou le mouvement
d'un corps ngiÙf' œste incllulIgé lorsqu'on remplace OUf:'fl)rc:(- F. a~issallt
1
(}at
F
lorce sur sa ligne (J'action, sans conséquence
sur t'effet produit. On
il
1
-
partir des propriétés établies jU$tl.ll 'ici rlaus ce texte et, 1'11 conséquence, on
l'accepte comme une loi empirique. Nous verrons cependant à la section 16.5.
lorsque nous aborderons la dynamique des <,:u'l)$ rigi(I~., cplP l'on pt'Ilt
déduire le principe de transmissibilité en faisant appel à (les notions il venir,
incluant les deuxième pt troisième lois de Newton. Pour l'instant. notre
étude dl" la t:lli(llIe des 0011')$ligides sappuiera sur les trois principes établis
jusqu'ici, soit la loi d'additivité des forces (règle du parallélogramme).
la
première loi de Newton et le principe de transrni sibilité.
Au chapitre 2, nous avons représenté par ùt>s vecteurs It"'s lèu'(.:es tlgtSSUlit
511J·LIlle particule. Le peint d'upplicatiou, la particule elle-même, restant
fixe, les vecteurs sont liés. Dans I~
cas de' corps rigides. ()11 pf'ut déplacer la
1
1
1
1
1
1
1
1
1
Figure 3.3
dont
affaire à des cecteurs (!,[iSSO'lls, différents des vecteurs lié . 11est à noter Clue les
propriétés dérivées dans les prochaines sections 1)011)" les fortes exercées sur
les corps rigides 'ont valables pour t-oul systèrue de \'fActeurs gljs~ants. Afin
de conserver le caractère intuitif de cette P" êsentaticn, nOLIspréférons (.'CIJPndant traiter le sujet dès le départ dans Il' contexte physique des forces plutôt
que d'adopter d'abord le point de vue mathéiuattque des vecteurs gli'isants,
Revenons il l'exemple du camion: ln ligne d'action horizontale (le la
force F passe par les rleux pure-chocs (ngll re 3.4). T-Jf'
principe de trunsrrussibilité permet de remplacer F par
une force ëqutoalente F' appliquée nu pare-chocs arrière
{lu véhicule. Autrement dit, le mouvement reste I~ même
et les autres forees externes ("V, B,. R2) de Ille ure Ilt
\\'
inchangées. que les hommes poussent sur Je pare-chocs
arrière ou (lU 'ils li rent su r le pare-chocs avant.
Figura 3.4
1
1
1
1
1
1
une force Ft de même grandeur ct de
même direction, mai' appliquée à tin antre point du corps. n condition que
les (/(fIL\' forces aient la même llglle (l'action (figtuE.> 3.3), Les forces F et F'
sont dites equtoalonte« parce (lU 'elles produisent Je même effet sur Je corps
rigide, Ce principe. selon lequel une force peut être transmise sur sa ligne
d'action, repose sur des preuves expérimentale -. On Ile peut le démontrer il
sur un point donné du corps,
1
1
F
R,
-
.. -
F'
..
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
72
Corps rig!Ôes - Sy-!>tèmesda torees équi\rdJen1S
variante de la règle de la main droite: on ferme la main droite en enroulant
les doigts dans le sens de rotation qlle F imprimerait au t.'Orps rigide par
rapport à un axe fixe orienté selon la libtne<l'action de Mo; le pouce indique
alors le seL1S(lu moment ~Io (figure 3,l2b),
Finalement, en nommant e J'angle formé par les lignes d'action de r ct F,
la grandeur du moment de F par rapport li 0 s'écrit:
Mo=,.-FSÎJn9=Fd
(3.12)
Où d représente lü distance qui relie 0 perpendiculairement
à la ligue
d'action de F, Sachant qlle la tendance d'une force F à faire tourner un
C()'1)S ngrde par rappurt à un axe qui lui est perpendiculaire
est fouctlon de
sa gntncleur F ct de la distance qui sépare F de cet axe, on })eul dire flue la
grandeur de Mo me~~{j
re 10 tendance de laforce F à entraîner la rotation (Ill
C()l7)~' ri{!.j(le})or rapport à UTI fixe fi·xl' daos ln diret'tiau lie 1\10,
Dans le système métrique. où III force se mesure en newtons (N) et la rustance en mètres (III), le moment de foree s'exprime en newtons-mètres (N, m).
Bien yuc le moment ~10d'une force par rapport à un point dépende à
la fois de la grandeur. du sens de la force et de sa ligne d'action. il reste
indépetulanr du point d'application de la forte le long de sa ligne d'action,
Réciproquement. le moment ~fo d'une foree F ne détermine pas la position
(lu point d'application de F,
Par contre, le moment ~10d'une force F de gratldcur et direction
données (Iéjlll!f complètement la Ligne d'action (le F. En fait. la ligne d'action
de 1" doit se trouver dans un plan l),L'isallt pHr 0 et perpendiculaire à ~fo; la
distance (1 qui sépare cette lib'Tle du point 0 correspond au quotient entre
les grandeurs de ~1() et F, soit ~1(}/F i ûnalement. le sens de M() détermine
de quel tâté de 0 se situe la ligne d'action de F.
Selon le principe de transmissibilité (section 3.3), deux forces F et F'sont
équivalentes, c'est-il-dire qu'elles produisent le même effet sur un (.'()tps
rigide. si ,elles ont la même grandeur. la même direction el la même ligne
d'action, A lu lumière de ct>(lue nous Vt'lIOIIS de voir, on peut reformuler ce
principe comme suit: lieux forces F ct F' sont ëquioalentes si, el seulement
,~i,elles sont éqttlJ)olletlte... (même grandeur et même direction) et ont le
mëme ,n0I1I('11l par: rapport (t un point 0 (1011 né. Les conditions nécessaires
et suffisantes il l'équivulence entre df'ILX forces F et F' s'écrivent alors
(3.13)
On ("0 dé<hrit que. si les l"(3](ttiOllS :).j.'} s'appliquent pour un point 0 donné.
elles sont égalcnlent valables pour tout autre point.
Problèmes à résoudre en deux dimensions. Plusieurs applications
se traitent [acilemeut clans un plan , I>r'cnons le cas des structures définies
par une longueur et une largeur, mais dont J'épaisseur est négligeable, ct
SUpPOs.uus que les forces s'exercent (laus le plan Je la structure. On représente facilement ces situations sur une page ou sur un tableau. Leur analyse
s'avère beaucoup plus sitrlple que celle des problèmes impliquant trois
dimensions.
Considérons pur exemple une plaque ligide SOUIll1.Se à une force F
(figure 3.13). Le moment dt! F p.tr rapport à 111.1 point 0 situé dans Je plan
de ta figure correspond au vecteur ~10,de grandeur Fd et (wrpen(liclllaire à
ce plan. Sur la figure 3,l3a, le vecteur 1\10 ~'f),1(If" la page et la force F tend à
faire tourner la plaque dans le sens antihoraire ; à l'inverse. sur la figure 3.13b,
1(;>ve-cteur (1/1t1'(' dans la page et la lorce tend à engendrer une rotation dans
le sens horaire, U devient donc naturel cle préciser le sens du moment de F
pu.r rapport ft 0 en utilisant les termes anrihorairc ~ dans le premier cas
(figure 3.130) et horaire J dans le second (figure 3.131)).
Copynghted matenal
,
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
PROBLÈME RÉSOLU PR·3.2
lIll€' [orco dc800N a~l sur le support tri qu'illustré
p.lr rapport au point B,
Calculez le 1I10111cntdt" ln force
IhO ulm
l
8
•
~
.!OC1111111 -
...
SOLUTION
lA' '!lOHII'nt ~ftl clc' la forci" F au pOllit B est ~\!,\III~p.ar
Mo=
où r vH r~l )(' \C<,If'Uf 1racé
rt't'taliguldirL'~. 011a
1'.\18
xF
clC' B à i\. En décomposant r VII
rA 'LI = -(0,2n1
f't F en composantes
i + (O,16111)j
fi = ROO ~}('OSCXl"i (~OO Xl sin 60 j
- (400 'li 1 13~:3N Jj
D
fifI·
Ch i\ part il d~<;prcxll1its vectortels cI~~
vecteurs unitaires présentés
3,7
dl' t, ~{'l bou 3.5. 011 obtil'1I1
.\
•
UI~ équations
~tR
,
xl'
r
IO.2rll1i
(O,I(jIIl)j)
X
11400Nli
(693i'.)j]
- -(1:38.6:\ . III ... - (j.l,O~°lll}k
t202.6:\ III k
'1
°
"',
~~§~§By~lt
:!uc:_
rA Ji
1
\11 \:
....'
1 "
".
Le moment ~11lest un \ ecteur pf'rpl"ndiculaire ail plan Ù~la figure et 11~ntr!! dans
1;1 PH~('
PROBLÈME RÉSOLU PR-3.3
l 'nf> 101Y't' (~t'30:\ agi 1 à l'extrémité d'un levier ayant une longueur dl" 1,5 m tel
'J1l·illu:.lll~° E\ aluez 1(' moment dt'
hl force
pfll'
r3pport au point O.
SOLUTION
()n décompose la lorce dt" 30 X en deux (_'(nnpruantes, P suivant l'axe OA et Q per()('lItliclIlairc à 0,-\, Etant donné Qllt· Ir point 0 ~f' trouve sur la li~e d'action
ciE" liil forC'IJ P, 1.. moment dt, P par rapport li. 0 est nul. el le moment de la force
Ùl' 30 l\ ~l' réduit nu utomeut de Q. qui l':,t orienté Cil SCIl~ horaire lot donc n~gati[
en représcntauon
scalaire.
\I()-
Q-(30Nl:o,III2.0°
IO,26N
Q 1,,)11))- (1026~)(I,5111)= -15,4N'l1J
1o':t:101doun ..• '111(' I~ r(,sultul :>C'ruair('I\I() l'~1 nl~g,atJf, ho moment
P,It!l' pl s'(>crit
\1
76
~10 entre dans la
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
80
Corp& r!g1CH!S - S~Ii'emes né tcrc~ eqwva ems
Il il 111 - -
-
Il Il III
1
3.7 Une caisse ayant une suasse de 80 kg est tenue eu équilibre tel qu'illustré.
Évaluez :
(I) le moment crér- par 1" poids \l' pnr rapport au point E:
Il) la force mlnlmale à appliquer ~I" point 8 qui crëera UTl moment de la
même grandf'tir mais dans le sens opposé par rdpport au point E,
1
Cl !i 111
3.8 Une caisse ayant une masse de 0 kg est tenue en éqtliljb~, tel (~u11111str~.
Évaluez :
fi) le moment créé par le poids \V par rapport au point E:
/1)
la force minlrnale à appliquer au point A qui créera lin moment de la
111élll(' ~"'llr1('ur mats dans If' sens opposé par rapport au point E.
c ) lu grandeur, la direction et Il' point d'applicatiou au bas dl: la caisse de la
plll$ petite foret" verticale nécessaire pour créer un moment de la même b'TaDdeur
Illfll s en S(,I1.~opposé par rapport à E.
('
3.9 et 3.10
U" haillon arrière .t\B d'une auto est supporté par un levier
hydraulique Be. Si Je levier créé II1It' force de 125 N selon Sou axe Sur la chanuëre 8,
déternunez le moment de cette lorce par rapport à la charnière 1\.
Figure P3,7 - P3.8
3.11 U" tr('lliIIIUtIlLIC'I,\13
rst uülisé pour redresser If' plquet d'une clôture
tel qu'illustré à la f1~re P3.11 - P3.13, Sachant que la tension dans le cable BC csr
de lWO ~ et que li = 1,90 ni, déterminez:
(1) 1(' 1I10111f'nL par rapport à 0 de Lnforce apphquée au point C. et ce. par
déccurposition de 1<"1 force St'IOII de 8,X(':. hori'l.olltal ct vertical au point C:
Il)
le moment p<Lfrapport à 0 de la force appliquée al! point C, et ce. par
décomposition de lu force selon des axes horizontal et vertical au point E,
Il''lII IL,I.)n~
l'U IIIItI
;2·111
011 vous infonne
force créant un 1110111enlde 9f)() N'm par
rap!>ort ù D est suffisante pour redresser le piquet CD. Si cl = 2,80 01, déterminee
3.12
411'UlIl'
la tension nécessaire dans le câble' ABC,
Figure P3.9
313
0., vous informe qu'une force créant un moment de 960 Nom par
rapport à 0 est suffisante pour redresser le piquet CD, Sachant que la capacité du
1(l'"il,\B t'sI dt" 2400 N, déterminez lu distance mlnlmale d nécessaire pour créer
,IIU
Il'
1
H10II)('llt
3,14
dé iré par rapport à D.
Un mécanicien utilise lin hollt de tuyau AB en guise de levier pour serrer
1.. oourrolc d'un altcruateur,
Eu ~Ippuyalttsur le lll).
li
nu point A vers le bas, il crée
dl' ·185:\ sur l'alternateur au point B. SI hl ligue d'uttiorl de cette force
passe par O. évaluez le maillent créé p'Lr rapport au boulon C,
IIDt-' [Of(.'C
1)11111Il,ions
3,15
Formez If'S pr()(juils \'('Ctoripls B
résultats pour prouver l'équation
sin œcos
Figure Pl.10
J3 = 1sin
X
(0'+,9)
C pt B'
xe. O"B::;::
+ ~sin (a -
B'
f't
IJtilisczlcs
(3).
3 16 UnE' droite passe par les points (20 Ill, 16 rn] et (-1
minez ln distance perpendiculaire cl entre la droite el l'ortgtne
coordonnées,
ln,
-4
0 du
m). Détersystème de
120 111m
O,bj,')
Figure P3,11 - P3.13
o.~III
"1
A
65
FIgure P3.14
mlll
C P
1
90
mJT1
72
UJJlJ
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
84
Corps
<I(jiu~$
- S,':>lflm('<,do
tvlC.1i
~q'.V;tll!tlt~
Puisque Q est la somme de QI et Q!1.. sa composante en !I doit correspondre
à la somme <les OOfnpo ...antes elllj Je Q, et Qz. En conséquence, les e.:<pressions 3,27 ct 3.28 sont égales. et la relation 3.26 est démontrée.
Par ailleurs, l'associativité Ile s'applique en aucun ca.') aux produits
scalaires. En fait, (P' Q)' S n'a
dt.. signill(:al10n r(~f'lIeétant donné que
P'Q représente un scalaire ,t non pas un vecteur.
On peut aussi exprimer le produit scalaire des vecteurs P et Q cu
fonction <le leurs c.\)lnposantes rectanzulalres. On décompose d'abord les
~"à~
vecteurs; on a
P'Q = (P,i + Pyj + f';;k) '(QyÎ + Qyj + Q;;k)
permet d'écrire p. Q comme une somme de produits
scalaires. tels cJue P,..i·Q, i cl P~i' Qyj, Or. le produit scalaire de deux
vecteurs unitaires dorme t(llljnllrs 'l-Grt, 011lin. conséquence directe {le la
définition (lu produit scalaire.
La distrlbutlvité
J"'1 =
1
.,
0
J'J =
L'expression de P'Q~t'
k'k= J
k'i =0
j'j = 1
j'k=O
(3.29)
réduit alors à
(3,30)
Dans le eus particulier
011
P el Q sont égnu....:.011 obtient
P: P ==
P; + Pj + P; = pZ
(3.31)
Applications
,
1. Angle entre deux vecteurs donnés. Ecrivons deux vecteurs en
foucriou dt-' 1t'111"S
('()I nposantes.
P = Pzi + Pyj + f.:k
Q = Q,.i + Q!Jj + Q~k
On détermine J'angle entre tes deux vecteurs en égalisant les expressions du produit scalaire 3.24 et 3.30, On a
!J
PQc.'ù O=I)t:Q. t-PyQy+P=Q=
En isolant co (),on trouve
cos 8=
PxQx + Pl/Q,'
PQ
(3.32)
2. Projection d'un vecteur sur un axe. .onstdérons un vecteur P
formant un angle 8 avec un axe, ou ügne directrice, OL (flguf'e 3.21).
On définit la projection de P sur l'axe OL par le scalaire
Figure 3.21
POL
La projection
f.l/L
p
Agura 3.22
.....P:Q;
= Peas 0
(3.33)
est égale, <;>11 valeur absolue, à la longueur du
segnlent O.r\; elle prend une valeur positive si OJ\ va dans le même
sens tlue l'axe OL. c'est-à-dire si fJ est aigu. et une valeur négative
si ()est obtus. Si P et OL forment 1111 auglp droit, la projection de P
l'tir OT~est égale i\ zéro.
Cotlsiclpl'OIlS maintenant 1111 vecteur Q (lingé le long de OL et
dans le même sens qut> cet ax« (fi).{url> 3.22), Le produit scalaire de
P et Q s'écrit
POl-
P'Q = PQcos8= P01.Q
(3.34)
Copynghted matenal
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
·88
CorpariWd!;la
-
5ystitrr.œ dB loIœa~en1s
les cosinus directeurs de t'axe HL;
XA/8 ~ :1:;\ - ro
YIVlJ = '1/\ - YB
ZNiJ ""' ZA et F.'hFv etF:representent les composantes de la force F.
oi)
A",.
Ày et ~ sont
ZlJ
li est à note!!' que Terésultat eî:'t indéllendant de la posftion du pOitlt 13 chaisi
sur l'axe donné. De fait, si on écrit lcL pour wl130int C différer.lt de 8, oa
obtient
AlcL --
À' [(l'A - rc)
x F]
,..,A '[(l'A - r8) X F]
Or, puisque les vecteurs A et rD -
+ A, [(r8 - rel x Fl
se trouvent sur 1'1même ligne. le
volume du parallélépipède dont les côtés correspondent à A. fs - l'C et F est
nul; et le produit mixte de ces trois vecteurs est aussi nul (SectiOTI 3.10)'.
Lexpression de Mel. se reduit alors à son premter terme et l'équaticu
devient identique à: celle qui définit "'191•• De plus. tel que vu il, la section 3.6,
lorsqu' on calcule le moment de F par rapport à un axe, A peut (..orrespondre
rt n'importe quel potnt te long de la ligne d'actio'n de Il.
l'c
Copynghted matenal
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
-Ij '" :3j
- 2k, Q'"
3.35
Soit les vc'(.1t~nrs "
3.36
Formez les produits scalaires B'C
c&
calculez les produits scalai res p. Q, p. S. et Q' s.
-i,.. -lj -
et B'<C,
Olt
5k, et S = i + 4j + 3k,
B=B' cl utilisez les
r(oslIlIats obtenus pOUf prouver l'Identité
8
(.'OS
3 37
l'angle
œcos f3 = 1cos(a
+ f3) + le05 (a - f3).
Considérez le filet de volley-bali de la figure P.3.37 • P3.38, Déterminez
fOfll1épllr
I(Os haubans .t\B el r\e.
B'
Figure P3,36
'J
2,4
,
rn
F
'J
lE
1
1
1
1
Figure P3.37 • PS.38
1
1
1
-
Figure PS.39 • P3.40
3.38 Con.~icl~n·I..I(,nl(·1 lh- voile-v-hall
de la Iî~ul'(, P3.3ï - P3.38. Déterminez
•
l'llnglt· rorlll(' par k-s hUllhtllls r \C ('. :\D.
La section .·\B d'un oléoduc se trouve dans le plan '.JZ et forme un angle
d" :370 avec l'axe ::. r RS sections CD el EF sont connectées 11AB 1,,1qu'illustré.
Détvrmlncz r{llIgl ' forInt pllr I('~ lll)'llll't ,\8 l·t (;D.
3.39
92
3.40 La section ,\B d'un oléod uo s" trouve dans le>plan IJ= et forme lin anglt'
do 37" avec l'nxo :;. LRs sections CD et EF' sont connectées à A8 1('1qu'illustré.
1)('tC'fII\ÏI""", l'angle ronn~ pi,lt h'$ tuyaux r\B (" EF.
Copynghted ma nal
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Les é<IIUltiOIlS suivantes décrivent le système [oree-couple équivalent :
R=IF
M~=IMo=I(rxF)
(3.52)
3.18 Systèmes de forces équivalents
R
On obtient donc la force R en additionnant toutes Ips forces du 'i\'StpI11E'.
Le
•
moment du vecteur-couple ré ultant ~f~,appelé 111011IC'11 rësultant du
système, est obtenu en additionnant les moments par rapport à cie tontes
les forces du système.
Après avoir réduit lin système de forces à une force et un couple au
point 0, on peut facilement le remplacer par une force et un couple
appliqués à un autre point 0'. Lu résultante R demeur inchangée alors que
le nouveau moment résultant ~1~ est égal à la somme de ~f~
cl du moment
ptlr rapport ù 0' de la force R appliquée à 0 (figure 3.42). On a
°
-
FIgure 3.42
(3.53)
En pratique, on passe par les composantes pour réduire un système de
forees à sa ré ultante R au point 0 et au vecteur-couple ~{~. Les l.'Otnpo-
.
santes rectangulaire
, .
s ëcnvent
de vecteurs po ition r et des forces F du système
r = xi + yj + .:k
F= F{i + FJ + F~k
(3.S.j)
(3.55)
Après avoir introduit ces expressions de r et F dans l'équation 3.52. on met
en facteur les vecteurs unitaires i, j et le. pt on obtie-nt, p<)ur R et ~,(~:
Les composantes R\, fi!! el R~ représentent respectivement la somme cl cs
composantes en x, y el z des forces données; elles mesurent la tendance du
systêrne à transmettre au corps rigi(le un mouvement (le translation selon x, IJ
ou z. De même, les composantes !\·1:. j"f~i.et ~f~
correspondent respectivement r. hl somme des moments des forces données par rapport aux axes x, Ij
et z, el elles expriment ta tendance du système à procurer au corps rigide un
mouvement de rotation autour des axes x, Ij ou .:.
Pour connaître la grandeur et la direction de la force R Il partir des
composantes R\. R./ ct R;. on utilise les équations 2.1 cl 2.19 vues à lu
section 2.12: on calcule de la même façon la grandeur et la direction du
vecteur-couple ~f~.
3.18 SYSTÈMES DE FORCES ÉaUIVALENTS
Nous avons \'\1 à la section précédente que l'on peut réduire tout système
de forees agis ant sur 1111 corps rigide il un système force-couple uppllqué
à un point donné 0, qui rend parfaitement compte dt' l'effet des forces
sur le corps. Deux systpl11e,fI de forces sont donc équivalellts s'ils peuvent être
rt'dutt« nu 11111111' systènll' [oree-couple 0IJpliqué il lin point O. Sachant 'lue le
Systl>II1P [oree-couple au point 0 est défini par les équations 3.52. on peut
dire que deux Systèl1lR· rieforces, FI. F2• F31 .... et F{. Fif,
(11'l,llqu,Js
(JII 'UPI/U: c0'7)s rif!./l/e sont ëqutoalents si, et seulement si. les SOIUHU!S des
forces el les sommes des 11l0tllents des force. par rapport à un point 0
Fa.....
sont
r('SI)('rtil;(~111(,11' r{!,fll(·s
pOlir
lrs
fJ(·UX .~yStèI71(~".Mathématiquement,
113
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Ces expressions indiquent que les J110J11enls de R par l'3Pfort
axesr et z doivent correspondre respectivement à 1I1~{et ,~fe :
cUL'\:
:l 2' R!!o!lUdlOl1 (j'un systeme de torees
a un torseur
·3.21 RÉDUCTION D'UNI SYSTÈME DE FORCES À UN TORSEUR
La majorité des systèmes de forces dans l'espace donnent lin système
for('e-('ou~le équivalent au }X>intO. composé (l'une force R et d'un vecteurcouple Mo non nuls et non perpendiculaires entre eux (figure 3,~(0), On ne
peut pas alors ramener le système à une force unique ou à un couple eul.
On peut toutefois remplacer le vecteur-couple par deux autres vecteurscouples obtenus en décomposant l\1~:
les composantes ~Il'
orientée selon R.
et M2• située dans un plan perpendiculaire à ft (figure 3.4ô1J). On remplace
alors le vecteur couple J\>12 pt la force R par une force unique R flrpli((l1~e
selon une nouvelle ligne d'action. Le système d'origine se transforme nin i
en une force .R et un vecteur-couple ~fl(figure 3.4&). c'est-à-dire en une
force R et lin couple agissant dans Je plan perpendiculaire
à R. On appelle
torseur cc système force-couple particulier pan.:c que la eombluaison résultante de:" poussée et de rotation correspond à une torsion. La ligne <l'action
de R devient alors l'axe du torseur et le l'3PI)()rt l' = )\11IR repr+S('ntf> le l'(/S
du torseur. Un torseur se COlllpose donc de deux vecteurs colinéaires. soit
une force R et un vecteur-couple que l'on écrit
(3,61)
-
o
lb)
(II )
(r~
Figure 3,46
Or, l'équation 3.35 de la S(>CtiOIl 3.9 permet de projt'ter un vecteur sur la
ligne d'action d'un autre vecteur. La projection de l\f~sur la ligll(> d'action
de R donne
Le pas dt! torseur s'exprime alors comme suit":
(3.62)
5. Les expressions obtenues en projetant le vecteur ....-ouple sur la ligne I1·Q(.1ioodl: R l1 pour le: p.u
du torseur sont ind(!pend.mte5 (lu point 0 choisi. La relation 3.53 dl' la scctioo 3.17 permet
d'ëcnn- p<)lIr 1111point 0' dl(f(l"'nt de 0, Il' 1IL1II1(onÙ('ur de "ffIIUl!iutI 3.62 c,,,nnll' sult :
R'l\ll!, =R·([\(g+s x R)= R'l\(~+R'(li xll)
IR prod IIlt luildl' H· (s X K) est ~1l1 A 1"-;rol'~ l'on a
R·M~.=R·l\(~
L'ég;dité prou,'_' (lue le produu 5<.'\IIlÛn:R' ~~
l~
IIl~pcndallldu
() ~
('''(}L~du poiltt 0
117
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
•
Ij
F
PROBLEME RESOLU PR-3.10
Trois câbles sont unacbës à une cornière tel qu'illustré. l\enlphlcC'L les
forces des cÎthlt"s par un systè,ne force-couple équivalent ou point A.
HM} mrn
1
...L_~~-
~----/\
100
1
""11
1
~
E( 150 rnrn, -50 ITIro. 100 mm)
SOLUT10N
On commence par déterminer les vecteurs position trucés du point A vers les points
d'application des différentes feroes. On clrcon1posr ensuite ces [orees scion 1('1111'
composautos f('ctanglliairl's. Ayant noté lJuc' F 8 = (700 1'\).\81:.011
_ Bè
"";5i-150j +SOk
li5
AIJ~- BE
on
:1.
= AB = 0,075i
fCI:\
= t\C: = O,O,Si - 0,0501.
t",
<\d(~li()llnant
OOOj+ 20nk
F (' = ,Oïi
,\V ""-O.lOOi - O.lOOj
F,) = 600i
les (.'()1I1 pesantes
des forees
x.1) et c
- 707k
+ l039j
en présence:
~ F' - • J ('1( 17\
R
-(5u....~)J..
Le calcul de ~l~ 5f'1"'''facilité si l'on pxprinll'
déterrntnnnts [section 3_8) :
tIJJol,~ N'II,I k
RJ
Fil = 300i -
Le s)'slènlf' force-couple au point A, éq1livalent Ù l'ensemble des fOfC('S, est
consntué de la force R = îF ('1 du couple ~f~~:::
!(r X F). La force 1\ est obteuu« ('II
!II
(43!l ~)j
+ O,050k
f/Jl,\
rL'IA -
(1;.6'> N '1(1) j
-
en mètres ('l en newtons,
(:10
•
•
1
"111) i
ru", X FI!-
•
O.Oï5
300
Fe
=
O,C).50
-600
200
•
k
-().O50
-707
J
(l.Oi5
T07
()
()
,
,
,
/
-
rD!.\ X 1;0=
-
La
S0111111e'
-0,100
1039
k
~
-.j5k
=30i
-
IT.6Bj
l63,9k
dt" ces e 'Pre' sions donne' alor
~ rX
Les
.}II- ~
moments des forces SOIISfarole' dl'
k
0
0
J
0.100
600
1
k
J
0
•
1
rC/11 X
1('5
i ~1 -4'1< J \; lj
F
COlTIIX)Slult('S rectangulaires de
croquis ci-contre,
III \
13
•
III 1
foree R et du t'Ouple
1 ) "i l) ~
I\f!: sont
• rn
k
Illustrées 311
121
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
déplaçant Il de sorte que son moment IJH rapport au poil1t A soit égal à ~I~ (voir la
section précédente). On peut ceaclure que le vecteur postnon 1\ tracé du po:i~'1t.1\ li un
point qùe}oonque situé sur la ligne d'action de la force umque Il, doit satisfaire l·équ.at1t>u
rXR=M~
Ce prin.ctf1e a été al>PUquéaux problèmes résolus PR..J.", PIl-J.9 et PR-3.11.
i j'ou se tro'uve de~ul't une sitLJati()n
où les forces en présence. ne sont ni concourantes, ni coplaaatees, ni parallèles, 10 il)'5:tème
force-couple équivalent au point 1\ eonstste en urne force R et un vecteur-couple M~
qui, 00 génêrnI~ ne sont 110S perpendiculaires entre eux. (POlU" vérifier ln perp.endicularlté
entre Il. et ~t~.
ou calcule leur produit scalaire: si cehn-cï est ,égal' à zéro, ils sont
pelpeildicuJai'res; si tel n'est pas le cas, R et ~1~ ne sont pas perpendiClÙaires,) Ell.cas de
llon-perpendicularit0 enb:e Il et. M~t le s)'Sfème foree-couple (-et donc J • SYJiotèOlf) de forees
initial.) f:l8 pourr» pas être redutt fl tUle force uniqtJe. Cependant, on pourrait le l'édu.ire à
un torseur, c'est-à-dire à Jo. combtnaïson d'une force R et d'un vecteur-couple 1\-11• dirigés
trelon une t:igne d'action eommune appelée l'axe du torseur (figure 3.47). Le pas du torseur
se ealcuie par p .s AI lm.
POlIr réduire un systènle de forces à un torseur, Ot1suit les étapes su1:\lanl'es;
Réduire le syst'ême de forces il un système force-couple éqUi'V'.d.ell.t (Ut~)à
l'origine O.
Déterminer le pas du torseur p il l'aide de !'éqlUltiorl 3.62
Ml _ R'~I~
p=
a
R
(3,62)
R
&primer 10. reiedon entre le moment du torseur par rapport
l'nOll'U:!'ntré!.--ultaot ~t:~
du système force-couple au point 0 par
3;1..1
point 0 et le
(3,63)
Cette relation petinet d'id.èntiRer le point o.ù la Ug'li\ed'action du torseur crolse un l'Jao
donné, puisque le vecteur IX)SÎtionr est orienté de 0 vers ce point.
Ces étapes sont déedtes au problème résolu PR-3.12. Bien que J'identification d'un
torseur et dl) point où son axe croise un pbll) puisse pnraitl"c difficile. li}proeédere ceasiste
li appliqu-er piusieurs principes et teclutiques présentés tout au lQr~gde ce chapitre. Il est
tmportant de bicll vtsualtser et d'assimiler le principe du torseur pour une parfaite
comprëheoston du chapitre 3.
•
125
Copynghted matenal
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Problerr
'3.133
Une feullle de tôle pliée est soumise à trois lorces. t e t qu 'illustré.
Sachunt clllc' Ic's 1l'ni... fè,r()t'~ uni la 111/'111('gnulCtc'nr P, r(·"lpl.ll'('I.-tC·~ p,lr 1111tur't'ur
équivalcut ri détcrmincz :
1)
la gTtmdellr el la direction de La force résultante R.
1,' le pa.\ du torseur:
(" l'axe- cllI 1C)r,.('lIr.
!J
...1
H
A
(
J
'/
...
~
(/
/--
--
n
1,
'l
_n
1
..."
'.À._.
l
-
Il
...
/1'
p
,
Figure P3,133
Figure P3.134
dt' ~rand(,lIr p sont appliquées
IIr 1111bloc d'ahunimum
tel qu'illustré. nl'lIlplu<:(.'L-I,· par lIlI torseur équivalent et détennme>:
CI J
la grJJldt.·ur et la direction de ta foree résultante R:
'3 134
Troi. forces
,)
le pas du torseur:
1)
l'axe du torseur.
'1
l
,I
~'III
(J~)
o
-Agur.
P3.135
1
2u~
r
IIIU
Agure P3.136
UnI" ft'uillfi' df' métal est nx~('il lin bloc dl~bols à l'aicJ(' dc'
dru vis [('1 fju'lIll1strr. H~clllis(~1. les lor('(~~ l'I Il'li couple-s C'II pr(osc·tlc·l' ÎI Iifi IOJ':\c'ur
équlvalent l't caleulcz :
II J
ln force résultante R:
'I)
1(' prL'l clu torseur:
,'J Ic' [l<Jilll oil ]'IIX(' du torsr-ur (!r()i.~t·((J plan .l'=.
'3.135
et
3.136
11H11
133
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Proolnmes supplernen la Tes
143
. lU :-;
10 Ï\
1---120
n1n1--,",
60·
~) mrn
~I
/
-
1501llni
-l_
•
.J'i N
,.....,(_.
....
,i....
FIGure P3.156
Figure P3.157
UnE' dalle hf:>xagonale en hétc)ll de 12 m dt> ('{)tt' supporte six colounes,
tel qu'ijlustré, Détenuinez la gl'üodc,u' des churgc·s sllppl('III(·flIILirt·~ il llpplicl'u'r
en 8 et en F si la résultante de l'ensemble des charges doit passl"t"par If' centre de
y
3.158
!20 tx
1
15 k:-.
la dalle.
~Ik
Ir,k~
r
3.C1 La poutre AB est soumise il. plusieurs forces verticales tt"1 '1111111151((\,
Concevez lin programrlle permettant de calculer ln grandr-iu dr la 1'1.; "hante:' des
forces et la distance x; du point C, oit 1;1lih"l1f' c1'actioll cI(· ln fort-" r(-sultllllh' croisv
la droite t-\B. Utilisez ensuite ce programme pour résoudre:
le problème Pll-3.&;
Il J le problème 3.1 ()6a.
o(
!)
Il'
IJ
rIO
f'
•
C
12 rn
~I
Figure P3.158
r
1
F
-
FI
~.fl~
1
C
•
A
--
FIgure P3.C1
Figure P3.C2
Concevez lin pr'Dgfüllllne permettant de déterminer Il' grand,'ur l't
If' point d'application dt" 1.. résultante df's forcf's verticak-s PI, P2.... , Pli agissllllt
nllX points AI. 1\2•... , Ali silH(oS sur 1(·plall sz,
tilisez ensuite ce programme polIr
3.C2
résoudre
(1)
1))
c)
If' problërne PR-3.l] :
1(:'problè Ille 3.12i ;
Il' problème 3.129.
3.C3 Un ami "''OIIS demande dl' l'aider à COIlCt·\ oit dr-s potx dt· rlt'lIf:' dl'
différentes formes, ayant 4~ 5. 6 011 S eôtés, Les (,lôl(ts cloh'l'I'l c"lri' int·li"é:. pllr
rapport ~l l'uxE' vertical df' 10°, 20° ou 30°. Ét'ovez un prognlllllne permettant dl>
calculer l'angle a du biseau pOUf chacun de." douze IJl()(]c'If's pos~iblc'!> cl" pol cil'
Ileurs. (Sllgg(\~tion: SlIppoSf'7. qll<" l'onglc- du biseau cI(· l'h,llIUl' planche du pot ('!il
ég,ù à la moitié de l'angle formé entre les droites normales il deux côtés adjacents).
Figure P3.C3
C p n
\
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
PROBLÈME RÉSOLU PR..4.1
•
2400 kg
"--
On utilise une gnle stationnaire ayant une 1I1~~' Je l()OO k~ IJOII1'soulever 11111.'
caisse
240(lkg. I~I
gril€' (''Ii t('IIIIf' en sililatioll (r~qllilihn' par 1111t' rotule lIU point A
et un appui il hnscul€' au point B. Son (!enITC cie gra\ ile' est situé au point C. Déter-
oc'
minez I\;'s('('1I1pI)Santes des réuctions aux points 1\
B.
l'l
'"--1---'111,---1
SOLUTION
<lu l'ilrl"
1(' diagrallllllP du corps libre.
On calcule ('I\Sllit~· 1(,poids d,'I;\ gnu' ('1 cvltli c11'hl cais:-v ('1"1IHlIltipliallt IC'lIr 111:1.S$('
rcspecnvc par la constante gnl\ilaliwnl1t'Ilt'. g = ~.81 1l1ls-1,Ainsi. 011 ohlil'utl:.lISIO :\
ou 9,81 kx pour la ~rll('. et ~3 500 N 0112.3,5k~ p01l1' la caisse.
La réaction il la rotule A ('st 'UlP force cie> dirpction incunnue, n'pfi~~('ntC:l~ par
se' composantes AI et Av. La réaction il l'appui ~,bascule B est perpendiculaire ~llu
surface de COlitact, donc horizontale. On supposc' qlle' l\.,-, 1\'1 et B a~ssellt dans les
IJillt{ranlllll'
9,8] k."\
......O ..... 1iB
2
111-1-
-1 [n---I
directions illustrées li. In
lihr«'. On trace d'abord
n~II(1'ci-conlrt-.
( alcul de.' li. Léquilibre exige que la souune des moments dos fortes externes
au point A soit nulle. Léquation np contient ni _\r ni. '9' puisque les 111011101115
de Al
('1 Au par rnp[lort ;111f)I)inL •\ ~nlll nuls. En multipliant la gralldc'lIr d.· ('II:I(.'IIIll' d.,s
autres fOrli'S par IC'Hr distance ail point /\. on (-crit
-s: 1.5 Ill)
T~~l\/t\= 0:
-
{{l,BI ki'\)(2 IId - (23.5 kN)(6
u-
B -- + JOi,J I-N
Éhllll douué
q1l(' 1(, résultat
Ill}
=0
1(1-11..'\
....
('.-;1 poS'itif. l'Ia)l)utll(\~e de l'orir-ntation dl' la foree au
poillt B est valide,
C'ulcu] (It· \,. La grandl"lIr de la eorllposnntp A, est calculée en exprimaut CJUI'
la som 111<>des con"ros~uli es honzom ales (11'l> fc)ret'S t'"\ l"nlf'), ('~t111111(,.
~!.F. = ();
.4., + B "" ()
,\ ... ..l..
107.1 kN = 1)
A, = -107.1 k:\
"\,
111--;- Il'\
-
...
,
clan né CJlle le résultnt est !u'gatif, l'hypolhi'ç(· de l'orientation
de 1:1
composante A, n'est pas validc : celle-ci t"~tdl' l>1·lllo fJppOM" (\('~ la ~.ll1C'lh·).
Etant
C:Hl...ul
fil: .\",
EII suivun! le même ruisonnement ti"E' précédemment,
qUE.'la sonuue des l'oluposanlt"s
011 sait
verticales est III Ille.
A" - ~),S1 kN - 23,5 k . = 0
~\I= -r33,3
10i,1 k;X
lOi 1 ix
En addlnonnant
112.2kN ~1 ï.3Q•
1(>5
k_\l
vecteurs A, et
\
~I" 011
trouv ('
'IUf'
la réaction i\ l'appui .4 ('si
•
\'(·riflt·utiolt. On l't'III \'i1li<Jpr Ir;'! r~a('lioli~obtt'IlIl('S ,'II sr- ruppolnnt lJ1l1' la
50111,1)(:' des moments des forces externes (l'htu'~(Js et réactions par rapport tl lUI
point donné est nécessairement nulle. Ains], si l'on utillsc le point B, on écrit
+1l:.1\18 == -tU,SI kN)(2111) - (2:J,5 k~)(6
ln)
+ (IOï,l
k:\)( 1,.511\) = 0
153
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
PIobIBmes
Résolvez le problème 4.7 si a = 400•
4.8
159
4.9 La poutre 1\8. ayaJlt une lungueur de 10 111. est déposée sur deux supports C et D. En négJigc>ant I~ poids dl" la p<)lItre, déterminez l'étendue des valeurs
possibles de la force P nécessaire pOUf garder l'ensemble Cil équilibre.
La valeur maximale adrnlssible pour chacune des rëacuons ('st de 50 kN
ortentëe vers If' haut. En n('gligc8111 Ir poids d.. la p01ltre', cl~l('nlül'('i'. l'étendue des
valeurs possibles de." la force P néecsssjrc pour garc!t'r la poutre en sltullUut'l
sécuritaire (sans basculer).
4.10
2
ln
3
3
III
III
2
III
Ftg\lre P4.9 - P4.10
4.11
POlir la situation décrite an pmhlf>1l1f' réosolll Pl'-4.2, détermiaez
l'étendue des valeurs possibles de la fOI"(;~P pou r que la poutre soit en situation
sécuritaire, sachant que la valeur maximale permise pu ur chacune des réaction. s est
de 30 kl:\ et que la reaction au point 1"\ est orientée vers le haut.
4.12 En vous référant au levier de la figure P4.12, déterminez l'étendue des
valeurs possibles de la distance a pour que la réaction d'appui au point B ne dépasse
pas 100 N dirigée vers le bas ou 200 N dirigée vers le haut.
r-
III -,
1OC1 '\
a --I-Il
1110 x
1.)11 N
JINI "
rt1rn-
~
,\t:====~~~.~~~==========~~8
l'
1-
c
fJ
50 N
I·--I2.
.. mm
I---S "un -_. ~·__
B
~
.....
111111
_J
1----450 mm -~-4.')() mm ---t
Figure P4.12
Figure P4.13
4.13 En ,"OIL'\' référant à la figure P-!_13, c1~t('rlnin("'L. l'étendue des \'all"llrS
possihlps dt' 10dish\n~f' fi pOlir quI" la poul no soit ('11 ('lai sécuritnire, sachant tille hl
valeur maximal .. udmtssible dt· chacune des réactions est dt, 180 N ('1 que le poids
de la poutre est négligeable.
4.14 Résolvez le problème ....13 en remplaçant la charge de 50 N par une
autre de 80 N.
4 15 Le levier BCD est fixé à un rible en
les charges tel qu'illustré, calculez :
CI)
la tension dans le câble AB ;
IJ la reaction au pivot C.
B et pivote au point C. En appliquant
t
Il =0.l8111
L
A
~
0,24
111
1.-0.,
m-+-O.4 m--I
Figure P4.15
IJ
4.15, sachant que a = 0,32
4.16
Résolvez le problème
4.17
Sachant que ln teusion dans le câble I\B est mainteuuc
la foree verticale P à appliquer sur la pédale:
la valeur de la réaction correspondant au point C.
t/
J
1)1
4 18
Déterminez la tension maximale applicahle
In'lI---~
•
..j1
111.
à 2(lO N, calculcz .
au câble .-\B si la valeur de
lu réaction maximule admlsslbh- Ou point C est de· 250 r\.
1------).:;0
t\
Figure P4.17 • P4.18
Copynghted ma rial
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
4.36
deux
Résolvez 1<>problème
".37, sachant que le câble BE est pnrallële aux
163
tig('~(Ir.: 3()D).
U Ile console est tenue au repos par un câble
"Jq
point E el par les
Fe eçt I~gèrenlf'nt
rL\~au
rouleaux san frottement A. B. Cet D. La largeur de la tringle
inférieure li la distance séparant les rouleaux, Evaluez là foree qu'applique clla(ju"
rouleau sur le montant, sachant que a = 20°.
,1,)(""11'--
IOOmm
F·~a
«t:
-lU mm
..JO 111111
iO mm
20 mm
:1011 ,
(;
Figure P4.39
l'
...
30 '"1"
[)
t
Figure P4.41
t1(t~()h('1 1(' probll'I)l(' 4.39, achant que
4,40
o = 3()~.
" 41 Une console est tenue pM des chevilles placées aux points A et 8. achant
qllf' If' coefficient de rnenon entre les chevilles et les rainures est nul et qllt> P = 15 1'\.
calculcz :
III
la force exercée par chacune des chevilles sur la plaque:
l,) la réaction d'appui ail point F.
En se référunt tl la plaque du problème 4.41. on souhaite que la réaction
maximale ail point F soit dt' 20 N pt orientée vers le bas. En nrgligC'anl 1(' Ïmtternent
4
2
aux chevilles. déterminez l'étendue des valeurs po. stbles dt· P.
.. 43
Une masse
qu'illustré
Î\
c!(th'nllitl("l.lu
1•
de 8 kg pellt être supportée de trois façons différentes. tel
lu ngur'" P4.-l3. Sachant (Jue Ir l'ayon dl' ln poulie B t'st de' 100 mm,
rénetiou nu poinl J\ pour
I,h 'n----I
chacnnr- d 5 sitUilliolls prcts,·nt('('s.
'"'1,--1,6 'n----I
4,5ln
,n
1--1.1l nl----I
il
1-1.5ln~
Agure P4.44
fn 1
Ir)
30
Figure P4.43
III m
301nln--j
C
•
UII pou-au dr 1;5 kg 501llil'Ill rt SOI1l~~lrtJ),itt' C lin fil (l1C'Clriqllf'. Ln
tension dans le fil est de 600 N et celui-ci forme au point C un an~lt' de 15° avec
r
. 4
l'horizontale. Déterminez les tensions maximale et minimale perrnlses
hauban BD si ln gl':lnot"lIr du couple en 1\ Ile peut dépasser 500 ~ . Ill.
18
I~
duns lE' L
4 45 UII(' tension t'OILSI1UltE" de 5 N est malotenue sur un nib ail mu..~nétilluf:'
passant par deux poulies, A et B. tel qu'illustré, Sachant que chaque poulie a un rayon
do ..j mm, dl-ll'rlllillcL hl réuetlcn d'appui 1111 point C.
•
.\
Ir., \
Figure P4.45
•
B
j~
Il1111
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
4.71
fi}
b)
4.72
En vous référant à la barre illustrée à la IIgllr<' P4.; t,
la tension dans la corde BD;
la réaction au point C.
PrOb€rTJBS
d~t('nl1jn(,7.:
Une caisse de 50 kg est attachée à la poutre. tel qu'illustré. Sachant que
a ... 1,5 Ill, déterminez :
CI' la tension dans le câble CD:
b J la réaction au point 8.
U.&
,-1\
0.3
4.73
ln
B
III
Résolvez le problème 4.72 avec a = 3 m.
4.74 En vous référant à la ûgure P4.74 - P-I.75, évaluez Ics réactions
points A et B, sachant que fj = 50".
0.4
~l11X
O.b III
III
Agure P4.71
l
....,,-0
1.4
)
V5()
Figure P4.74 • P4.75
111
1
\1'
mm
1:-·
-tl-"'I
Agure P4.72
4.75 En vous référant il la figure P4.74 - P4.75, évaluez les réactions aux
points A et B, sachant que f3 ;;;; 800.
4.76
171
~
Une roulette de 4,1 kg, ayant un diamètre de 200 mm, est au repos entre
deux tuiles d'un plancher, tel qu'illustré à la fi~lre P4.Î6. Sachant. que l'épaisseur
des tuiles est de 7.5 Il111'. évaluez la foree P nécessaire pOllf plaCf"r la roulette sur
les tuiles si
n
la roulette est poussée vers la gauche;
b, la roulette est tirée vers la droite.
La barre ABC est supportée par un pivot en B l·t par 1I11e:.: corde
tnextensible fixée en A et en C et passant par la poulie sans frottement D. En
supposant que la tension est la même dans les ceuons AD et Cf) de la corde el en
négligeant le diamètre de la poulie, déterminez la tension dans la corde et la réaction
d'appui au point B.
FIgure P4.76
4.77 et 4.78
V ,160
III
-1C
fa
2.5f)
IIAnl
L10
111111
ft 1
iO rnrn
A
-- ..
R
1-0 =
1-----2AO
Figure P4.n
Ulm
, J .'
120 mm
------1
4.79
Solutionnez le problème 4,22 en utilisant I~(méthode de 11<\ SI.:ctiO,1 4, i,
4.80
Solutionnez le problème 4.2; en utilisant la méthode de la section ·1.i.
Figure P4.78
Copynght d ma nal
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
184
Equ lore des eoros ngu:Jos
4. ~10
Résolvez le problème .t.l09. si
li
=
1,5
Ill.
Vue hampe dl' 9ô() mm cie long est retenue pttr une rotule en C ct par
deux câbles, DF et DM. Le câble V,\E passe par une poulie sans frottement fixée
à l'extrémité A. Une charge de 1280 N est appliquée au point B. Évaluez la tension
4.111
,L'lOS chaque câble et la réaction en C.
li
400
!J
DIIlIt'IlSIOtl,
en mil)
250
,.1111
x
1
1
FigUTe P4.111
-4.112
RC:$OI\'l'~Il' problème ..t. III si la churge dl" 12 0 N est déplacée au
poiut A.
50 111111
4.113
Figure P4.113
La barn' dt' llu"lal.ABEF ('1'1soutenu€' pat Ics palipf. C et D et par un
<..able I\JI. Ln section IVJ de la barre mesure 250 mm. Une charge de 400 N agit au
point P. ELl supposant que le palier 0 Il'exerc . aucune poussée axiale, calculez:
tJ)
1:1 tension tians le câble ,\11 ;
/,) les réactions aux points C ('t D.
'l
0.6
III . ..n--,
-
0.9
__ 111
4.114
Le panneau cl une ouverture de toit de 20 kg pivote sur deux charnières
t\ el B. Ln pente (lu toit est de 30° par rapport à l'horizontale. Le couvercle est
maintenu en position horœontale à l'aide de la barre CE. En supposant que la charnière .\ n'exerce aucune poussée axiale. évaluez:
tl)
la gr:llld('u r de' lu roree upplïq uée par la barre:
Il) les réacnons aux charnières.
4.115
III:li"(('IIII('
"O,!) III
U"'" pl:HIIIC' n'<.'tHllglilalrl· dl' :100:-" Ilxée aux
C'tI po),itioll pur .111(·âhh· t!,r'.
11lll'1I1IC'poll,~fi(l("
fi)
Il)
nxlale,
En .supposant
CIU('
chumières
la charnlèr . B n'exerce
l'i.VBIII(·~:
la tensiou d.uIl> le cûble :
les réactions aux points A et /J.
Figure P4.114
y
r<
Di mcnslons
Pli
mil'
120
1;
/'
.".-
-
Figure P4.1 15
1\ et 8 est
11
..
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
188
4.133 Une trappe de 50 kg el de densité unifonne est supportée par deux
charnières sur SOI) côté ,\8 el par nn câble CE. Déterminez la tension clans le câble.
équlI.tlre <tes cocps tlgodes
y
2>111
IUIlI
2.:l0
1l1n1
~
"'00 IIIUI
i\
Dr:'~
A:
.N
: 200 IlltnL
<'-
nnlx
<,
·IKtl mm
' ....
y
Figure P4.133
4.134
R~:s()lvt'zIl· pmbli'IIH" 4.133 r-n remplaçant le câble CE par un câble
reliant les points D et E.
4.135 Une barre de métal ABDE est soutenue par deux joints à rotule en A
ct E. cl par Ir câble DF. Si la barre est sollicitée par IUle charge de 600 N nu point C.
évaluez la tension dans le t'âble.
4.136
Résolvez le problème 4.135
("TI
remplaçant Je câble OF pnr un câbla
reliant les points B <.>1F.
Dimensions
Cil 1""1
SON
1
!
Figure P4.135
80
111111
Figure P4.137
4.137
Deux plaques recrangulntrcs sont soudées ensemble, le] qu'illustré il ln
ligure P·lI37. Ll' montage est supporté aux points B ct D par de.s rotules cl appuyé
au point C sur une bille dëposëc sur une surface: horizontale. Calculez la réaction
d'appui au potnt C. sachant qu'une force de 80 N est appliqué
ail point A,
C p n
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
198
Foreos rëparlWS conuoioes
el centres da gral/llê
5.1 INTRODUCTION
Nous avons supposé jusqu'ici que l'attraction terrestre exercée sur un corps
rigide correspondait à une force unique W. appelée force cie gnlvité ou poids.
NOLIsaVOIl$ appliqué cette force' <1\1 rentre (If! grfll;;tf {ln corps (section 3.2).
En réalité, la terre attire séparément chaque particule du corps; son action
correspond donc à un très ~rand n011lhre de petites forces réparties sur
l'en crnblc du oorps rigide. Nous verrons toutefois dans ce chnpitre qu'une
force unique équivalente \V peut effectivement remplacer la multitude de
petites forces. et qu'elle s'applique au centre de gravité du corps. Nous
upprendrons à situer ce centre pour <les COlpS de fOlll1eS diverses.
En première partie. nous ft1.ldit>rons les objets plans tels les plaques et
les fils dunt le parcours se siluc dans un plan, Afin de localiser le centre de
gravité (le ces <''OTpS, nCJU$ ferons appel à deux nouvelles notions : It' centroïde
d'une aire ou d'une courbe ct le ,nOluent statique (aussi appelé le premier
moment ou tout simplement Je 111011lcr,t) d'une aire ou d'une courbe par
rapport à un axe donné.
Nous verrons ens ulte que le Ca.)ClÙ de l'aire d'une surface de révolution
ou celui du volume d'un solide dc révolution dépend direct nnent de
centroïdc de la courbe ou de l'aire qui engendre kt surface ou le solide de
révolution (théorèmes dt' Pappus-Culdinns). Déterminer le centroïde d'une
surface slrnplifiera J'etude des poutres S()1I111isesà <lescharges réparties et le
calcul des forces exercées sur une SUJfuc.'C rectangulaire submergée comme
celles des vannes hydrauliques OLI <les barrages (sections 5,8 et 5.9).
Pour compléter ce chapitre. nous apprendrons comment trouver le
centre de gravité d'un (.)()rps tridimensionnel et le centroïde d'un volume,
ainsi yue les moments statiques de ce volume par rapport aux plans du
S\ stèrne cie coordonnées.
J
SURFAC.ES ET COURBES
5.2 CENTRE DE GRAVITÉ D'UN CORPS PLAN
Considérons d'abord une plaque horizontale (figure 5,1) que l'on divise en
11
l)(."tlL~élérneuts.
L·· coordonnées
On attribue
.r!! et y'J. au deuxième. etc .. et
XI
cl
yl
IlU premier élément •
nomme â\V[. â\\1Z, .... âW,. lps forces
exercées par Laterre SUT (''CS éléments. Ces forces. ou poids.
On
correspondantes
convergent vers le centre de la terre : cependant, pour des raisons pratiques.
un peut considérer qu'elles sont parallèles, Leur résultante devient doue
une force unique clans la même direction qu'elles, dont la grandeur
correspond à la somme des gr,lndcuTs des poids des éléments.
"'1
\\'= ~'VI
+
~\,f"
+
-
... + a\v
•
ri
•
•
w
\V
,
/
X
~;\/~
!:lI,
/
l
1
X \~'
"'!f 6 \.1'
!i \\' ~ Iy il\1'
Figure 5.1 Contre cie gravJte d'une ptaque
Copynghted ma nal
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
210
5.10 à 5.16
r6parlJOS: cenHoides
III contres de grav10
Forces
Situez 1(>oenmiîd<> des sIIrfi-tC'es planes
iIlIJSlr'{oCS.
!I
&)
!J
6<)
III n,
47 mm
fil n 1
Demi-ellipse
1
..........----'1
60mm
1
~/7
/
/
90
r
iOrnm
\....
Figure PS.l0
r
L
rU11l
lC
Figure P5.11
Figure P5.12
!I
y
Somme!
r~
'1
Parabole
60 mm
li
,) = 4
III
T'
a = Sn)
Figure P5.13
!I =kx3
6n Ullll
L I-r5nun~
20
r-
I
20
•
111111
\
1--
:}O III m
Figure P5.15
Figure PS.14
11H11
l
kllZ
x
30
Figure P5.16
5.17 Déterminez l'ordonnée du oentroïde de la surface onlbragée en fonction
de r" r~ pt a.
Il
'1
n
,"
Figure P5.11 • P5.18
Figure P5.19
rend vers r2, ln position du centroïde tend vers celle
du oentroïde d'un arc de cercle de rayon (rI + r2Jl2.
5.18
Prouvez
qllP
si
rI
5.19 Dét<·fIlÜnc.'Z l'ordonnée dt! ecntroïdc du trapèze ci-dessus Cu fonction
de b r- b2 et Il.
5.20
sorte que
En
\"OI1S
Ii = 3,../4.
rapportant à la figure P5.10, déterminez Je rapport rz!r •. de
C P
1
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
214
Forces reoorues: ceonotoes
Une fois l'aire calculée ct après avoir évalué les intégrales 5.9. la résolution
(les équations donne les coordonnées E et y du centrnïde df" l'aire.
01001111&5 cl" glrrv,l~
P{:....!I)
IJ
'1
('lt
!J)
rly
1
T
l{rl
~
o
de
'1
11 1
l
1
•
-n
()
a
-
x,/=:t
:t,,=
dA=ydx
r
·1
:C
()
x,,-l
9,.
Il..,.:C
T
.r,1 =
-v, =!I
'i;Il =
dA = (0 -xldy
d.-\
(Il)
Cerrtroido et airs des olémonts dltferenucls
l'lie!> /)
>1)1'
7f ~IIIIl
(cl
HI~éh1"ifl"e. on
son eentroïdc en évaluant les intégrales 5." de la section 5.3:
Lorsqu'une courbe
détermin
:1
=!- r~dO
(CI)
Figure 5.128
l'
LI
ti. =
Hile forme déflnje par une ~'1"ation
J x (IL
yL ==
J y dl:
(5.4)
remplace l'élément de longueur {IL par l'UJ1C des expressions suivantes,
choisie selon la variable indépendante, x. y ou 8. utilisée dans l'équation qui
définit hl courbe (on clélive ces relations à l'aide du théorème de Pythagore):
00
dL - JI +
(J;)' dx
(IL =
1+
dL -
(~~)' dy
\1 2 + (~~)2rlfl
r
1\près avoir utilisé l'équation de lu courbe pour écrire "une (les coonlouuées
en [onction de l'autre. on procède à l'intégration: finalement, la résolution
des équations 5.4 donne les coordonnées et y du centroïde de la courbe.
x
5.7 THÉORÈMES DE PAPPUS·GUlDINUS
Ces théorèmes concernant les surface et les volumes de révolutiou ont été
formulés pour la première fo1.(ôau troisième siècle êlp. J.-C. p_tT If' gpomèh-e
gTe<:Pappus, et énoncés de nouveau plusieurs siècles plus Lard plU le mathématicien suisse GuJdinus, ou Culdin (1.577-1643).
Une ~lIrface (le r(J~)ll1ti(}n est 1l11f' surface f;'ngendrée- par la rotation
d'une courbe plane autour d'un axe>flX('. Par exemple, on obtient la surface
d'une sphère en faisant tourner l'arc semi-elrculalre i\BC de la figure 5.13
•
B
Spht·rt'
o
Cône
Figure 5.13
C P
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Dkillis('/.
5.141
cr une
coquille
par int{'&'l'alie'l1 dirN.'l(' la position
11IiJl(.'Vhémisphérique
dl'
unifonue
I_.('~({Il(-~
Si ,
« R (.'1 Il
= 250
l"
Problèmes
nl)'OIl /{.
Figure P5,141
5.142
du cc-ntroïde dl' la nloiti~
FIgure P5.142
la h~(, (l'un 1.0111 plnlt'h
0111 1111('
('pui~'\'lIr ttllifonllt"
"
111111.
~ilUl~LIL' ('(·"ln.' dl' grnvité:
Il'
du bol;
b]
du punch.
ro"r
5.143
Un entrr-pn-neur f'l! construction place quatre> pieux
déltrnlter les
foudatious cl 'II Il l' IIllIi-;OIl, Pour solidlflcr et mettre à niveau Il' sul. il a déposé une
épaisseur vnrinble dt>$.,'l'n\;C'rd'lin minimum de 60 mm pt d'lin Inl\.\;11111111 clf' 160111111
sur toute la surface. Déterminez 1(,volume de gravit'r néeessain- ('1 la eoonlonnéc.
de son centrorde.
(SIII!J!.t·'111oll:
décrit par l'équnüon 'J -
(1
SUPPOS('Z
(jllf'
1" IÇr:lVÎC'rrt'poSf'
sur 1111plnu ohliqm-
+ bx + c:..)
y
'1
IlI.,1l
III
Figure P5.143
Figure PS.l44
5.144
Loculisez pur inl{>~rlllioll directe le ocntroldc du volume compris
entre le plan x:: el la partie illustrée de la surface déflnie p:tr 1'(~(ll1UUOll
2
Ij - 16II(nx - x )(/I:' - :.2)la2Iil•
Localisez lc ccntroïde de la section illustrée. coupée
circulaire mince par deux plans obliques,
5.145
à
partir d'un tuyau
'J
Ij
!
3.11
"
Ftgure P5.145
.5.146
clljpti(1'
1('
Localisez Il' eentroïde
paJ' un plan ohlkJlIP
tilt
volume illnstré. coupé à partir d'un (.·ylitldrt,
Figure PS.146
247
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
')0
1000 ;-.J/ui
III
,-\
12(MJ \l
III
Il 1
rn
Figure P5.154
La poutre ,\8 supporte deux charges concentrées. Le sol appltqne sur
La poutre une charge
Déterminez :
verticale
répartie
«)
lu Ùi:s-tUllll('
l,)
la valeur correspondante
5,155
B
,
l,h
Figure P5.153
5.154
t
k\
0.3 Il
Situez lu
(1
linéairement
el orientée
~'C"S If'
haut.
= 20 kN/I1I;
cie IV n,
polir lacl"l'llt'
1('
du centre de gra\'ité Je l'élément
coort!UIIII('C' ;:
de
IIlacllilll'
il1u$tr(l.
'1
40
.j(l
,t.'
,l',
2(1
'1
.~
...:c
hH
1 )illlf' n~i()II~
.1~
t'II 111111
...
150111111
15
~
25"
4U
FIgura PS.1 S5
5.156
IIIIU
111111
..
x
Figure P5.156
Sunez If' centre de grl1\'it~ de la piè't'C' en lôk· iI1I1StT~("
5.157
Lot'alistrL Il' centroïde du volume obtenu
ombragée autour dl." l'axe des x.
pdT
lu rotation de lu Sl1rf'al'(.·
y
(1
1,
f----/I---
Figure P5.158
FIgure P5.157
5.156
La porte" <''U1Tér'AB à bascule est soutenue par des charnières le loug
du côté supérieur l\ ct par \111(' cheville (le cisalllcrucnt 0111 point B. i la hauteur dl'
l'eau retenue à gauche est 1/ = 3.5 m. calculez la force de retenue exercée sur la
porte par lu cheville.
l..è"llIlIlllt'IlH·:'\
"tlIH'
l ,d'II),lllIll'
'111\:1111' '11111 ('tIlIl,lIS
pll"!I.llIllll
jlollr
l'In '1III(tl(lIlH'~"
:11',11<11 d,·llIrclill,tll'llf
4111
.1111'
5.C1
UUe' poutre doit '_;tJ'l' capable' cie supporter des char~,·s rt.1partie's
uniformes ct des f'hargC's réparties (lui \"anC'ot lin~ai"l·nl('nl. 1('1 qu'illustré :1 la
Agun! P5.Cla, En vous inspirnnt du problème résolu PI{-.5J). dé(''UlILPOSt L la slIrfllt't'
V
c
p
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
6 l Introduct;on
6,1 INTRODUCTION
Dans les chapitres précédents, nous avons étudié l'équlllbre de corps rigides
simples, soumis à des forces externes seulement. ~OIlS allons maintenant
examiner (les structures comprenant plusieurs éléments. qui subissent à la
fois des forces externes agissant sur l'ensemble, et des forces internes, c'està-dire des forces que les divers éléments exercent les uns sur les autres et
qui assurent la eohé ion de la structure.
Prenons par exemple la potence illustrée à la figure 6.10, qui supporte
une charge \v. Elle est constituée de trois éléments. ou membres. AD. CF
f't BE. assemhlés à l'aide (le chevilles 011 de rivets san frorternent. La
structure e l flxée à un pivot (\11 point A et maintenue en place au moyen du
câble DG. Le <uagranulIf' du corps libre (DeL) de la potence (figllre 6.1u)
montre les force. externes, incluant le poids W. les composantes At et Ay de
la réaction en ...\. ainsi (111t' la tension T pxercée par le câble au point D. Les
forces internes (lui retiennent ensemble les pièces de la potence ne sont pas
représentées. Cependant, si l'on décompose la structure et que l'on trace
UII DeL p<>urchacune de se parties constituantes.
les forces qui s'exercent
entre les trois membres devront figurer sur les diagrammes car elles agissent
extérieurement n chaque partie isolée (ligure 6,le).
D
0
E
1·
- -
T
F
E
C
8'
8
F
10'
cf?
C
w
B
\\'
\l'
.\,
.\
~
~
A
(ul
tA.,
,\
1\
(1,)
Figure 6.1
II PS t à note r q IIf' la furc:p exercée t> Il B par la poutre BE su r )' élé Il. (en t AD
est ég:lJ~ ct opposée à la foree produite au même point par AD sur BE. De
mème. la force exercée en E par BE sur CF est égale et opposée à la force
développée par CF sur BE. Finalement, les composantes de la force exercée
cn C par CF sur AD ont égales ct opposées aux composantes produites
par AD sur CF. Ces considérations expriment la troisième loi de Ne vvton,
qui stipule 'Ille les [orees tl'nctlon et (le réaction entre (lé.'>(;017)$ qui se touchent sont cie même (!,ralldetll~de sens opposé, el ont la même liglle d'acuon.
Cette loi empirique fait partie des six principes fondamentaux de la
mécanique énoncés àU chapitre t et il t'lit essentiel d'y référer I>OlIrrésoudre
les problèmes traitant des corps liés.
Dans ce chapitre. nous anal) eron lrois grandes catégories de structures:
us 1retltts, egalement
appelés [enlies ou puull1:S f ritJ'l(!,ulé~, conçus
polir soutenir des charges. ont habituellement
stationnaires ct
complètement liés. Ils sont constitués exclusivement de poutres droites
jointes par leurs extrémités. En conséquence.Ia structure se colllpose
uniquement de membres bi/oree. • c'est-à-dire soumis n deux forces
égales et opposées orientées selon l'axe {J~l'élément considéré.
2. Les charpentes, égaJenlcnt conçues pOIlI supporter des charges.
sont elles aussi habituellement stationnaires et complètement liées.
Cepeudant. tout comme la potence de lu figure 6.1. les charpentes
1.
E
A.t
(c)
257
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
réaction'
aux appuis. La t"Onfigun\tioll des membres et des nœuds «('1111
treillis simple est tellf' <lu 'il est toujours possible de trouver lUI nœud où
s'exercent seulement deux forces inconnues. On calcule d'abord ces forces
en appliquant les méthodes vues à la section 2.11; on transfère les valeurs
obtenues aux nœuds adjacents. on les utilise pour déterminer d'autres forces
et on poursuit de la même façon jusqu'à ce qu'il ne reste plus d'inconnues.
À titre d'exemple, analysons le treillis de la figure 6.ï. Examinons l'éqnilibre à chacun des nœuds. en commençant par un point où Sc trouvent sculernent deux forces inconnues. Dans le cas con idéré, au moins troi forces
s'appliquent à chacun des nœuds. Il faut donc d'abord déterminer les
réactions aux appuis en examinant If' curps rigide fonné par l'ensemble <lu
treillis. Les équations d'équilibre indiquent (lue la réaction R,\ est verticale
el elles permettent de calculer les grandew'S RA el RIf'
Après celte étape. LIne reste que deux ÏllCOlll1UCS au nœud 1\, lluC' l'on
détermine en considérant l'équilibre à ee point. 1,.;;\réaction RA et les
forces F AG ct F AI). exercées en A par les éléments AC 'l AD. doivent former
un triangle de forces. On trace d'abord R.-\ (figure 6.8); sachant que Fi\(:
et F AD sont orientées respectivement le long de AC el/\D, on complète le
tri~u1glepOil r déteruuner ensuite la gr.uldeur et le sens Je F,\{' el F AI), Les
grandeurs FJ\(: et f~",)
correspondent aux forces internes des membres AC
et Al). La foree F AC étant dirigfe vers Je 1)as et vers la gallche. c'est-à-di re
vers le nœud A,
, le membre /"\C pousse sur l'articulation 1\ el sc trouv C en
compression.
A l'inverse, If' 1l1t'11I})rt>AD tire sur If' nœud A (Il' sorte qu'il est
en tension.
DUll!mJlllnC
du corps libre
roly~on(.'des
rOR.'{'S
Xœud .\
l'
l'
Xœud C
F~ll
Figure 6.8
6.4 Ar.AI)'se à un lreluls par la mélhode
ees nœuds
261
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
!?AJO(} N
PROBLÈME RÉSOLU PR-6.l
1000 N
l-l2In--I--.112
'll-(
En utilisant la méthode des nœuds, déterminez la force interne dans les éléments
du treillis illustré.
6 UI
6 nI
SOLUTION
Diu~rarnme du Ci)rr~ libre de l'ensemble du treillis, On trace d'abord
tl! Del de l'ensemble du treillis i les forces externes qui agisSt!nt SUT Ia structure sont
les deux charges et les réactions Bl,IX points d'appui Cet E. Il en résulte les équations
d'équilibre suivantes:
+~~Alc= 0:
(2000 N)(24
Ill)
+ (JOOON)(12
ln) - &(6
E = +10000 N
=0
E ~ 10000 Ni
Ill)
Cl' = 0
+i~F~= 0:
12f1OO N
3 'FAt)
N
+ 10000
N
+ c, = 0
Cy
;; iOOON~
(lu nœud Iihre ..\., Ce nœud est soumis à deux forces inconnues
appliquées par les membres 1\8 et AD, On trace un triangle des forces pour
Diagramme
I~---F.\8
<jt,~
-2.000 ~ -1000
Cy = -7000 N
2!)OI) N
calculer F AB et F AD' 00 observe que la barre AB tire sur le nœud , cette barre est
donc SOlL~ tension (elle st en traction). D'autre part. la barre ,ill pousse sur le
nœud et se trouve ainsi en compression. Les gnlndellrs do ces deux forces sont
obtenues par la relation suivante:
2000 N
--""
435
FAS
"'"
FIIl)
__;;,;;;;;...
I,()I):-" [
~
f' J"ll =- 2.500 \ ('
~
[0' 1/1 ;;:
Uia~r:lnllnl' elu no-ud libre D. Puisque la force appliquée par l'élément AD
est connue. il ne reste que deux inconnues dans le diagramme du nœud libre
(DNL) D. Encore une (oiS, on trace un triangle dos forces pOlir (."Ult."ulcrIl'~
effurts
aux barres ou éléments structurels DB et DE,
FDB
= FDI\
F De = 2{i}F DA
2,')UII:\ T
l~/I1 = 3U(l0 :'\ (:
"/lU
-
~
~
265
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
6.9 POlir chaque élément dl" la lel'Tlle cie toiture Howe tllustrée, évaluez la
force interne et indiquez .s'! l'élément est Cil tcnslon ou Cil compression.
Problèmes
269
6ltN
61eN
6kN
6kN
6kN
D
2.3.'3 m
1
3 kN
3 kN 5 III
B
1)
1
F
F
1
5 III
A
0
~8
0
0
6uI
l
[1
o
CI
1n118 InJ- ~ln~\·
III
o
S
Figure P6.9
C
E
fis Il,--t-S
_j_
o
ll~
m-+4--& 1111-+11-8
Il>--l
Figure P6.10
6.10 Pour chaque élément de la ferme Garnbre] illustrée. calculez la Iorec
interne et précisez si l'élément est en tension 011 en compression.
6.11 Pour chaque élément de la renne Fink illustrée. évaluez ln force interne
et indiquez si l'élément est en tension ou en compression.
2.25
2.2..5 ni
III
:3 kN
3kN
3kN
Do
i.s ~N
J
-
C
FIgure P6.11
t;;i
kN
=2
1,5 III
ln
ix "' ~k."\
2k:-;
E
1 fil
C
F
U
B
J
3nl
ln
2kN
III
1
0
1)
1--3
1.5 k:-;
F
J~
A
1.5 ni 1.5111 1.5111 1.5 III J ,5
1-,
A
-3111
0
0
(;
G
1 liN
--r2
III
Li
Fi9ure P6.12
6.12 POLIrchaque élément ou tr:f'illis lllusrré, évaluez lu force interne et précisez si 1'l'lc"lîlC'nl ost en tension OH {'il compression.
6.13
Pour chaque élément du treillis illustré. évaluez
la force interne et spé-
cillez si l'clément est en tcn ion ou en eomprcssion.
6 LU
-+--- 6 III--t--
6 n1-1
4 III
3 n1
·l III
1210tN
1 •--r.")
2.4k~
lF
1,5 kN
2kN
D
7'.6
Flgure P6,13
k~
D
0,75 kN
fil
J
o
9 ITI---I·
F
1
Il
1-
L:r\
:! kN
o:"""'-r
2.4 kN
3 Hl
oC
li
0-
C
1'1"
o
e
(.;,'1.
.....
_-!l
rn ~
~
6 111--+-0- 6 111---1-<- 6 !l1-
Fi9ure P6.14
Pour chaque élément du treiJlis à pt'ntf' double illllst~, détermlnez la
force intente et indlquez si l'élément est co tension ou t'1) compression.
6.14
Copynght d ma nal
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Probèmelt
Ij
273
1
lU m
-
•
Figure P6.37
·6.37
Un tl"('illi~est constltué de sb: éléments. LIest supporté par 1I11t· barre
articulée en J\. par dl'lI>: hurn:~.lrti('lIll'I·S ('11 8 l'I p:lr 1111" rultllt' ail point D. Le'
treillis étant soumis Il lu chargt' Illustrée. déterminez la fort,(' dau!I Ch:lqIU: 1I1t'lnhr('
cie l'armature.
Un Irt'illis est constüué de neuf éléments, Il pst supporté par une rotule
au point A. par deux barres artl(,\ll(o{'l> Cil B ct par une harre nr1i('III(o(' HII point C.
-6.38
I,A' trelllis étant soumis
Ù
la charge illustrée,
déterminez
la force Ù.IlI~chaque
membre de l'armaturr-,
y
p
., III
'llil
(l,fi
x
Figure P6.38
Figure P6.39
Un treillis est constitué de' neuf éléments. 11e t supporté par 1111(' rotule
ail point B. par c!C"IIX narres articulées en D et par une barre articulée au polut C.
(1)
\'(-riO,,/. ~i1(, tretllis est de t)1'f' simple. s'il est isostatique et si les
réactions aux appuis sont complète .
,)
'acltallt (Iu<' P = (-1200 !'\)j el Q = 0, déterminez la force dans chaque
*6.39
'1
9f)()
membre dt' l'armature.
(11lXl '\ 1 i
·6.40
·6.41
au point
ollliionnt'I'.
r\,
aJ
déterminé)
h]
It" problème 6.39. sachant que P
= 0 et
Q = (-900
x 1k
/'
N1k
Un treillis ('st constitué de lb éléments. II est supporté par 1I11(' rotulepar deux barres articulées en B et P.'lf une h.ITTl· urticnlée ail point C.
Vénûez si 1(' trcilhs est de I)pt' simple, s'il est isostatlque (~tatJ(llI(\IIlI'1I1
et si les réactions à Sf'S appuis sont statiquemeut ùét(.'nllill(·(:~.
POlir ln situation indiquée. déterrmnez la force dans chacun des .si'(
éléments joints
:111
nœud
(1)0"'11
E,
l
·6.42
Un tretllts est constitué de l ' éléments, II c rt supporté par tint' rotnlc
ail point .1'\, par deux barres articulées <.'11 LJ ·t par une hurre tlrti('ul('t~ "" point C.
fi)
VtSlinpz si 1(' treillis est de I)rpe simple. s'il est Isostatique (statiq,lIt'IlH'1I1
d('tt'rnliot') ('t si 1(':0;réacttons à 51'S points d'appui sont complètes,
/,)
Pour la situutlon
éléments joints
titi 11(1'l1d (;
illustrée,
rt~ll'rlnille7.la fol'C(' dans chacun
des six
Figure P6.41 - P6.42
Cap
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
2li kN
28k~
PROBLÈME RÉSOLU PR·6.2
1 kN
Détorrntnez la [oro- dall~ 1('$~l(>ln('nts EF cl CI de la structure
m
8111
28kN
8 III
111
SOLUTION
28kN
~1 -=~=C::::;;E
tf'"
illustrée.
,.;;..G::::;;:::;;;!~'
=i~K~l
-
fl~kN
Diagrfllnlllt'
du oorp" lihre (lu trt'iUi",. On trace le diagramme du corps
libre dl:'l'ensemble cie la srmcrure : les forces externes agissant sur elle sont les deux
10 l'TI
<"harg('sappllquées aux points Cet G, la force de tension au nœud K et tes réactions
d'appui aux points B et J. Les équation s d'équilibre sont
B
D
.B.
lJy
S,n
P
8 "'
Il
8 IJI
:;,III
8 IT'
+1~,\fB= ():
-(28 kN)(8 ln) - (28 kl''oi)(24m) - (16 kN)(lO m)
+ J(32
J=+33kN
28kN
B,
fi
+ l6 kN
ru) = 0
J=33kNj
=0
8" "" -16 kN
'"
A~~~C='~E~=/~G~'I~'==~K
__
16~k~
+,!~IJ 0:
!:::
2.'3 kN
(28 kN)(24 m)
F
DI
lôkN
"
+ (28 kN)(8
33kN
2SkN
ln) - (16 kN)(lO m) - By(32 rn) = 0
+23 kN
Dy "'""2.'3 kN
e, ""
l
Foree dan .. 1·~léllll.'l1t EF. On fait passer la section Ill. à travers le treillis afln
de couper la barn" EF et au plus cieux autres éléments de la structura. En retil1\ot
les barres sectionnées (EC, 'EF et DF), on considère la partie de gauche du treillis
initial comme corps libre. On observe sur le DeL qu'il )' a trois inconnues. Pour
éliminer les deux forces horizontales. on écrit
+jlFy
= 0:
161 \
+23 k~ - 281:cN - F B/~ = 0
FE.F == -5 kN
Le sens de F E.F a été choisi en supposant que le membre EF était en tension; le signe
2.1kN
négatir obtenu indique que EF est en compression,
F'el
1
Jou = .5 kN C
K
~~=::;9--'
1.
l~~
.....
10 III
IGk~
FUI
/
I ......
oO
Ifl
~
FU}
I-f> 1.'
de I'élément (;/. On trace la section mnl à travers le treillis
afin de couper la harre CI ct deux antres éléments de la structure. En retirant les
barres sectiounées {Cl. Ill et 1IJ). 011 considère la portion de droite du treillis
comme L'OrpS libre. On identifie trois ineonnues ; pour éliminer les deux forces
Force interne
pnssant par 1(" nrr-ud H. on écrit
+i~AJII
=
0:
(3.3 kN)(8In)
- (16 kN){lO m)
+ Fc/(lO ln)
Fc/=-lO,4kN
=0
J'(;r=IO.-ik
C
~
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
4.
Une ferme de toiture Mansart est soumise aIL" chilr~esillustrées. Calculez
l'effort dans les memhres Dr',
oc et
EG.
6 14
Une Ierme de toiture Mansart est soumise
l'effort dons les barr 'S cr, 111 c:t Hl.
aIL\:
charges illustrées. Calculez
f
]
,{
D
H
.3 IIi
L
o
treillis de pont Warren t'sI soumis aux charges illustrées, Calculez
l'effort duns Il'S membres C";. DE c't Dl',
l'Un
1------4 "'11 ,1
III·
2.25
fj,2,ij III
nlJ~
IrI-f-,'
2.25 m
IIi
Figure P6.43 • P6.44
,
K
12,5
III . t 2..5111
fil) ~ '\
l2.:'5 m 12,:') m 12,5 m
ti(1
k:\
Figure P6.45 • P6.46
f a
Un treillis de pont \V'arren pst soumis aLIX charges illustrées. Calculez
J'cfTort clans k-s barres EC, FC et FR.
r:: ~'
L: 1(('lllIs d'ulle' pa.<;St' relie est soumis
ln force dans les barres CF. EF ct EG.
3lL'C
charges illustrées. Déterminez
:l k:\
11..'\ 1 k:\ 3 ~I\ :l k:-' 21.N 1 kN
Ù.8 rn O,oS III O.Sm
0.& rn 0.8 ru a.S.ll
5. q" Lé treillis d'une passerelle est soumis aux charges illusrrées. Déterminez
la force>dans les éléments FI, III et [11,
1
fi
D,
t;
o
{, 44
minez
la
Une> femle à écharpes Howe est soumise aux charges
force dans les (51~rnf'nts DF, DG et EC.
!
Illustrées. Déter-
Il'
C
l:
o
F
]
L 1
0
o
{
Figure P6.47 • P6.48
1 il k:-'
1 Il 1,:,\
I.n k:\
jl.h
k'\
~
0
,
C
8111
F
..
..
E
Bo
"\a
~
Dv
1 (; k:-'
0
0
G
fi ln
- ..
1
L
.1.5
III
K
~
Snl
Bnt
SIn
8111
Sin
Figure P6.49 - P6..50
Une Ierme HOINe est soumise uux cllargt·s illustrées . .I)~I('nl1int'7..la force
dans los ~~Iélll('nts
CI, IiI et IIJ.}(j
Une ferme de toit supporte des charges, tel qu'Illustré. Calculoz I'cfforr
1(:5 membres CE, DE el DF.
6 c
dans
5;:;;
Une ferme tic toit supporte des charges, tel qu'illustré. calculez l'effort
dans les membres EG, Cff ct H].
Figure P6.51 • P6.52
281
Copynghted matenal
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Les poutres et les câbles
On a construit des ponts suspendus pour enjamber des lIeuves el des
estuaires; leur lBbIier est soutenu par des cAbles. le Vemuano-Narrows.
qui relie Staten IsIa!1del Brooklyn. à New Yor1l. esl le pont ayanl la plus
longue portée aux Etats-Unis.
C
p
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
328
En vous référant 3U,'( données du problème 7.19. détemnnez la gr.lndeur
et l'emplacement du moment fléchtssanr maximal dans l'élément Be.
L@!;poutres (lI les câbles
7.20
7.21 Une force P est appliquée sur une tige pliée en fonne cie coude. soutenue pat un rouleau ct lin pivot. DtltCl'll1Înft7, les forces int mes àl! point] pour
chacune des configuratioos
illustrées.
p
p
r
r-
/J
B
r
a
ara
n
ta
c
r'
c
(J
f-
+-,
(1
a
1.
r'
(lo )
(0)
C
+1\
..l-
p
(e)
Figure P7.21
7.22
Une force P est appliquée sur uue tige pliée en forme de coude,
soutenue par UI'l rouleau et un pivot. Déterminez
chacune des configurations illustrées,
J
pour
p
11--11-
p
B
les forces internes au point
B
B
r
c
r
(a)
(hl
A
(c)
Figure P7.23 - P7 .24
F1gure P7.22
7.23
En considérant le Inontage de la figure P7.23 - P1.24. calculez le moment
fléchissant au point], sachant que f) = 600• La tige semi-eirculaire a un poids \V ct
une section uniforme,
7.24
En considérant le montage de la figure P7.23 - P7.24. calculez le moment
fléchissant au point J. sachant que () = 1500• La tige semi-circulaire a un poids \'"
ct une section uniforme.
Figure P7..25
7.25
En considérant le montage de la Hgure P7.25. calculez le moment
fléchissant <lU point). sachant que
poids \IV pt une section uniforme.
(J = 3(}0.
La tigt' forme un quart de cercle.
Il
un
7.26
.En COI1$id';nln·l· J(. IJloutage de la figure P7.26, calculez le moment
fléchissant au point J, sachant que (J = 300• La tig!' forme 'ln quart de cercle, a lin
poids \V et une section uniforme.
7.27
En considérant la tigt' du problème ;.26. calculez la gr.mdeur et l'emplacernent du moment n~chjssullt maximal.
7.28
Flgure P7.26
la tigt' du problème 7.2,5, calculez ta valeur et l'ernplaIlëchlssaet ruœdmal,
En considérant
cernent du moment
Copynghted ma nal
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
332
A
Les pouues et 1...., C<il.'
1
'7.5 DIAGRAMMES DE t:EFFORT TRANCHANT
ET OU MOMENT flÉCHISSANT
&S
-
P
t:
2-
1.
-1
2
o
(0)
p
c
'.
i\
~.
i
l'
R~:.
1
1
•
A
E
D
tloL'
H
l' '
R",,-~
-
(bl
ir----j \''')''l'
r
C
1)
R
~r \..
l'
R~ ~
r
à
-
(c)
\.
(el 1
V
P
'>
:::0
L
_-
-L2
f'
(
...)
.If
PL
4
---------
-2
(fl
Figure 7.10
Maintenant que nous avons clairement défini la graIldeur et-le sens de l'effort
tranchant et du moment Iléchissant, on peut facilement présenter les résultats
obtenus SUT toute la longueur de la poutre en mettant en graphique ces
valeurs en fonction (Je la distance x mesurée à partir (le l'une des extrémités
de la poutre. On appellera diagramme (le ['effo,-t tronc/tant et diagramme d'fi
moment fléchissant les graphlclues ainsi élaborés. Considérons, par exemple,
une poutre simplement appuyée AB, de portée L, SOUTIÙseà une seule charge
concentrée P appliquée au point milieu D (figure ï.l Û(l). On détermine les
réactions aux appuis en analysant le diagramme du corps libre de la poutre
complète (figure 7.10b) ct l'on trouve que ln grandeur de chaque réaction
est égale à P/2.
On sectionne ensuite la poutre au point C, entre A et D. et l'on trace
les diagralt)lnes <les corps libres t-\C et CB (figure i.tOc). 0" suppose que
l'effort tranchant el le InDOlent fléchissO/lt sont positifs, ct on oriente les
forces internes V et V' et les couples internes ,M et 1\-1' dMS le sens indiqué
à la figure ï ,9(1. Considérant le corps libre ~\C. 00 égale à zéro La S0111tlle des
composantes verticales et la somme des moments par rapport C des forces
agi.'isaotsur le (.'orps,ct l'on trouve V = + Pf2 et AI = + Px/2. Les deux valeurs
sont positives: on peut le vérifler en observant que la réaction en A tend
à cisailler 1:1 poutre et à la plier en C tel qu'illustré aux figures 7.91J et c.
On trace ensuite le graphtque des valeurs de V et L\l obtenues entre A et D
(figure!' 7.) (W et j); l't>ffort tranchant est constant, \1 = P/2, et le moment
Iléchissant augmente linéairement de At == 0 pour x == O. à 1\1 = PU4
pow· x = UZ.
Coupons maintenant la poutre au point E, entre D et B. et considérons
le corps libre EH (figure 7.10d): la somme des composantes et la somme des
moments par rapport à E des forces appliquées sur le corps libre sonl égales
ù zéro. Il en découle (lue "
P/2 et lI'f = P( L - x)/2. Leffi)rt tranchant est
négatif alors que Je moment fléchissant est positif: on peut le vérifier
en observant que la ré..action en 8 plie 1,,1 poutre en Etel qu'illustré à la
hhl'ure 7.9(' et qu'elle t~J\J il la cisailler dans le sens contraire à celui qui est
montré à la figure 7.9b. On est maintenant en mesure de compléter les
diagrammes des figures 7.1Oe et .f; l'effort tranchant est constant entre D
et B. soit \' = -P/2, alors qllt> If' mome-nt fléchissant suit une décroissance
Linéaire, évoluant de 1'1 = PU-! à x = U2 vers AI = 0 à x = L.
Lorsqu'une poutre est sournlse uniquement à des charges concentrées,
J'effort tranchant est constant entre les charges alors que le moment Iléchissant varie linéairement sur le 111ênlC segment. Par contre. lorsqu'une pout.re
soutient des charges réparties, l'effort tranchant et le moment fléchissant se
comportent très différemment (PR-7.3).
2
x
-
Copynghted ma rial
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
7.63 Résolvez le problème ï.29
section 7.6.
l'II
utilisant la méthode
présentée
à la
(~J)
utilisant III méthode présentée
tl 13
7.64 Résolvez I~ problème
section 7.6,
7.30
7.65
Résolvez If' problème
section 7,6,
7.31 en utilisant la méthode
7.66
présentée
à la
Résolvez If' problème 7.32 en utilisant la. méthode présentée
à la
section ;,6,
utilisant la méthode
présentée
à la
7.::>4 en utilisant la méthode
présentée
à la
7.67 Résolvez le problème 7.3.3
section 7,6,
12 kN/ln
c
At--,--_-.----.------"
ln
Eu considérant la poutre et la t'harge' illu:.tr(-('S li la figuI"C Pi.69,
a}
tracez le' tliagraJlllues dt· l'errurt tranchant ct du moment lléchissant.
J))
déterminez la valeur absolue maximale dt, l'(;'1fo rt tranchant t.'t celle du
moment Iléchlssant,
7.69
1----1---1---'1--- l ,S rn
0.6 m
in
Figure P7.69
Résolvez le problème
section 7,6,
E
D
7.68
l'II
---l
7 70
1)
(1 J
En considérant la poutre et la chargE' illustrées à la figure Pï,ïO,
tracez les diagramlnes de l'effort tranchant et du moment Iléchissnnt :
détermtnez la valeur ubsolue masimale de l'effort tranchant et celle dn
b)
moment fléchissant
c
~
0.4
UI
-'011-0---
Figure P7.70
0.8
III ---j
7.71 Hc:soh'cz le problème ; ...(1
section 7,6,
('II
lItjlis~lllt hl méthode présentée
à la
7. 72 Résolvez le problème
section 1,6.
7.-[2
t'II
utilisant la méthode
présentée
ù la
7.73 Hésolvez le problème
section i,6.
1.39 Cil lItilisant la méthode présentée
à la
7.74 R{osolv('z If.' prohlèlllC'
section j,6.
ï.-lO
/\
7.75
fi
J
1))
t'II
Iltili~Jult la III(othodc· pr(> (·t\té(·
It,
En considérant Lapoutre et la charge illustrées à la Agllre P1.75,
tracez les diagrall'llllf'S ri...l'effort 1ranchant f't du moment Iléchlssant ,
détcnninez la valeur absolue maxlmale de "effort tranchant et celle du
moment Iléchissant.
(.'
/)
A
B
1..-51111511115111-1
348
Figure P7.7S
Copynghted ma nal
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Les relations ;.5 indiquent que la composante horizontale de Iii tension T
7.9 CAble l1ari\t:.'lIi~lJfIl
353
est la même PH tout point du câble et c1ue la (_'Olnposallte verticale Je T e-st
égale à la grandeur ,v de la charge mesurée à partir du point le plus bas. Les
équations 7,6 montrent que la tension 1'est minimale au point le plus bas et
maximale à l'une des attaches.
"7.9 CÂBLE PARABOUQUE
Supposons
maintenant
que le câble r\B soit soumis à une charge tl1lifor-
,.né,ru'lIt ré})(lrtie selou "axe horiZOl/t,,1 (figure 7.lôa). On peut supposer (l'le
les câbles (les ponts suspendus sont sollicités (le cette manière étant donné
qlle le poids des câbles est faible relativement au poids du tablier, La charge
par unité de longueur LV, mesurëa ho ri;:'()111 ale.IU:'I 1, s'exprime en Nzm.
On place l'origine du système de coordonnées ail point le plus bas C; la
c
/(
grandeur \V de la charge totale portée par le segment compris entre C et le
point D, (le coordonnées x et 1), devient alors \\' = 10X. Les relations 7.6. qui
donne la grandeur ct l'orientation de la ten ion en D. deviennent alors
IV.\'
tan (J=-
IV
(a)
(7.7)
t;
De plus. la distance entre D el la ligne (l'action (le la résultante ~f est égale
à la moitit: de la distance horizontale entre Cet D (fi~ure 7.16b). En additionnant les moments par rapport à D, on trouve
x
+~IAIn = {):
,....
x- - 'foU = 0
2
On isole !I pOUf obtenir
.,
C
T.~
/(
x
-
~~
1)
\\' = .. \
(b)
Figure 7.16
w.r
1) == 2T
o
(7.8)
IJ
L
Il s'agit de l'équation d'une parabole d'axe vertic ..ù dont le creux coïncide
avec l'origine du système de coordonnées, Un câble dont la charge est répartie
uniformérnent selon l'horizontale aura donc une forme parabolique''.
Si les points d'attache A ct B sont à la même hautcur. la distance L entre
ces points correspond à la portée du câble, et la distance verticale Il (lui les
sépare du point le plus bas s'appelle la jlèch(1 (figur(> 7.] l(l). Si l'on connaît
la portée cl la Dèche d'un câble, ct si la charge LV l')tlt unité de longueur
horizontale est donnée, on. trouve IH tension minimale T« en substituant
x = L/2 et y = 11 clans l'équation 7.8. Les relations 7. ï donnent alors la
tension et la pente en tout point (lu câble. et l'équation 7.8 tlénnit la forme
(a)
y
du câble.
Lorsque les attaches sont à des nrvcaux différents, ln position du point le
plus IJtlS du câble reste inconnue (C) et il lillit détermiuer les coordonnées
XA, YA. ct X/1, YII des points d'attache.
POUl' cc' faire. on pose que les coordonnées de A et H satisfont il. l'équation 7.8 et (fut! X(J - X,.\ = L pt 1)" - '1.'\ =
d, ail L et d correspondent respectivement ft la distance horizontale et à la
distance verticale entre les attaches (figures ",l7b cl c).
L'équation suivante donne la longueur du câble entre son point le plus
bas C et SOli extrémité B :
1 + ((II)
- )"- dx
(Ix
x
C
-t--
YB
cl
_l-
Y.~
e
-
\,\
tB
1:
ail
y
(7.9)
'lB
Y...
3. Un cÎlùlt.'tl'lldll sous sou propre 1)C'ltis lit' de slue
l'''lI IIrl('
IX,nîoolf>
(,If
la clHIl~e Il'('SI pas
e
rép;lrtip
selon la clirc>ctionhorizontale. Cependant. si le câble est lissez tendu. l'erreur
('ngI'11~ en supposant une fonnc parabolique est fiuble. La prochaine: section présente UIlO
analyse détaillée: de Ct: problème
IIllifonnérllf'nt
•
(c)
Figure 7.17
Copynghted ma nal
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
7 120 a 7 123
En vous appuyunt sur la relation établie au problèuie 7.119.
solutionof'7. les problèmes indiqués en commençant par résoudre 1(>problème cff'
poutre correspondant.
7.120
Problème 7.9-Jn.
1.121
Problême 7.97c.
7.1 2"
Problème 7.991J.
7. Î 2... Problème ï.10OJ,.
7.124 f)(-,nCllllrc'l. qlu' la courbe fOTllléc par un c.îblc supportant une charge
répartie lV(X) obéit à l'équation dlITérelllit>llc (r2y/c[xl! =: u.;(x)/l·o, où To est la tension
au point If' plus bas du câble.
7 121:' En uûlisalllin relation (.ttlhlit· au problëme 7,J 24 ... J('tcr"litl~~z la courbe
formée [lUT un câble de portée L el de Ilèclie Il, supportant ,une charg' répartie
Il' ;;;: tVu C<lS(1ttll...
), oil x est mesuré à partit tif' la III t-portée. Etnhlissez ('nSllilt' Ir!;
expressions etes valeurs nlfL'-inlalc' et 11Ijni.tIlHIt' dt" ln tension dans 1(>CRoit"
'7 126
Si le poids linéaire d'un c-âble 1\8 est
ln courbe formée par le câble est lin arc
obtr-nue (\11 problème ï.124.)
('
FIgure P7.126
= l&tl/<:OS2 O. démontrez (lue
dt" cercle. (SII!!J!f'sllotl: uniisez la relalion
tL'
*7.10 CHAINETTES
Considérons maintenant un câble AB soumis à une charge répartie unifor.
menu-ut le IOIlI!. du câlJI:t:(ft~ure 7.1&). Les câbles tendus sous leur prt)pre
poids correspondent à cc cas. La charge par unité de longueur, notée tV et
mesurée le long dll cable. s'exprime en N/m. La grandeur \\' de la charge
totale portée par un SE.'glllt"lIt du câble de louguellr.'i, qui s'étend du point le
plus bas C il LLO point quelconque D. devient alors ,v = t1..'8. On trouve la
tension au point D en substituant cette valeur nt' \V clans l'équation 7.6:
r
'J
_,
C
\\
l'
0
- ft·'
r,
\\'-11\
X
((1 )
{t'l
Figure 7.18
Afln de ·inlpliOer les calculs subséquents, on introduit la constante c = 1'ul(l.;.
On peut alors écrire
Tt) := tcc
\\f
= teS
(7.11)
I...l. fibturf' 7.1 Rb montre le diagranln1e du corps
du câble. On ne peul cependant l'utiliser pOlir obtenir
de la courbe des -inéf" par le c...âble puisqu'on ignore
séparant D cl . la ligne J'action Je lu résultnnte \V de
libre de ln portion CD
directement l'équation
la distance horizontale
la clat~e, Pour obtenir
cette équation, 011 considère d'abord la projection horizontale dx d.'UD petit
élément du câble cie longueur ds, soit dl' = ds L'US o. La figuT't!7.18(.' montre
(lue cos 1) = Torr; l'équation 7.ll permet d'écrire
(Ix = ds cos
'[0
(J
=-
'('
(I.~=
lt;C
ds
UlVe? + S2
d.."
= -....,...--~~
vi + S2/C2
Copynghted matenal
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
368
les po!..o1JBSet les câbles
7.134
Un
ni de
90
III
('st suspendu entre deux potnts liÎlué." ail
et séparés par une distance dt>60 Ill. La tension Il,a:drnale
calculez :
a) la Ili'eh(· dll 111;
b) la niasse totale du III
7.135
Êvaluez la flèche d'une chaîne de 30
III
<1'\05
In(3111C
niveau
le fil étant de 300 N.
de longueur attachée à <feux
points de même niveau et distants de 20 m.
7.136
Calculez:
Une cord dl' 10 III est attachée à
Cl)
b)
ÙL'UX
supports ..\ et B. tel qu'illustré.
la portée de la corde pour laquelle la portée- est égale à la flèche;
l'angle OB correspondant.
7.137
Un câble de masse linéaire 3 kg/n.. est suspendu ft deux points de même
niveau séparés de -lS ln. Déterminez la flèche minhuale permise si la tension
maximale dans If' câble doit €>tl'f' inférieure à 1800 N.
F1gure P7.136
7.138
Une corde de 50 ni axée:au point A pusse autour d'une poulie en B.
En négligeant le frottement, calculez la plus petite des deux valeurs de " de faÇ()n
qUf' la
corde soit en état d'équilibre,
sachant que L ... 20
Ill.
Fïgure P7.138
7.139
Un utilise un moteur !Il pour enrouler doucement un câble. tel
qu'illustré. Sachant que la masse linéaire du câble est de 0,4 kg/In, évrullf'z la tension
maximale dans le câble lorsque ft = 5 m.
~--IOIlI---t
011 utilise un moteur Al pour enrouler doucement un câble, tel
qu'illustré, Sachant que la masse linéaire du câble est de 0.4 kg/nl, évaluez la tension
maximale clans le câble lorsque. Tt = 3 ln.
7.140
,
Figure P7.139 - P7.140
A gêluclll' du poiut 8, le câble AnDE repose sur une surface rugueuse.
7.141
I.tl 1I1;'1$~f>linp:lln' du câble ptaot dl' 2 kg/ol. estimez la grandeur de la force F lorsque
a
= 3,6
m.
1---0---1
Figure P7.141 - P7.142
7.142
À gauche du point B. II! câble ABDE repose sur une surface nlgueIL'ie.
Ut rnass e linéaire du câble étant Je 2 kg/ln. déterminez la grandeur de la force F
lorsque
li
= 6
111.
7.143
U Il câble unifonue UC ruasse llnéalre 0.306 kg/rn est tenu dans la position illustrée à l'aide d'une force P appliquée ail point B, Si P = 180 N cl 8....== 60°,
déterminez :
A
a)
J,)
b
_____
t----a---i.!
Figure P7.143 - P7.144
8....:1_' ....
la position du point B:
la longueur du câble.
1
7.144
Un càhl(· IInilonl1c (I(~masse linéaire 0.306 kg/m est tenu dans la posilion illustrée à 1';1ldt· d'tille force P appliquée au point B. Si P = 150 N et 8,\ = 60°,
dc,;tc·nui1Î('z.
a)
b)
la position du point B;
la longueur du câble.
Copynghted ma nal
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
A.\e
l.ll'ltPUr
1)t~~I~U,ttlIJl'
c'
1
en
x
X
II..,;liI~
-l,
'"ln-
Hnu
.UUI
H,n lnlll~
,
14 .jU~J
~
10~ll(l
46:l
I! J
W1fl!) x '17
.210
1.")'1
._
,-"
W2HII:< 16.1
5~~J(J
211:1
:2l~1
J().ll,M1
'-').
1!'i2
S'JIll X 47,3
S2!';}(t X :1', S
fin3::!
305
.,
1"-
.j'1116
.2.'1.•
Ils
SI50)( 1~,6
2.162-
152
s.t
C311) x :14.1,1)'
C9,'lOx 22 ~
,j!t'29
~l!~)ï
3tl5
i'_OY'_ ,
fi')
C201l X 17.J
C l,50 x 1:2.2
.:!1"'1
1~~"
2().1
aï
15:1
~"l
WtlOX
1
Huuteur
11:1'
W,I6!')
Profilés
\il"
X
Axr )'.)'
X·,'\
k.
y
.,IlIl
UJJl1
-1'1
H~UIIII4
-k!f
111111
2M1
').;'1
196..1
63,3
66,3
IlS!
,JI6
1,0,';'
1':-.9-1
o4H,6
([102
1 II). 1
Il Il
JbI.4
,",S,1
la.4'
51.3
4' "
l'
nllll
r
S.H~J X ~I ..I i
}'
Pnulrelll',_
r~i4'res
1standards ,un{>nClUn~J
,l.l3
179,6
~,fi6
HO;
179,7
3,90
es ,,1
51ft
10,1,4
62.2
2,~1
0,756
24 ,'7
!17.1
!)'j3
1,615
W:W
I~
l ,-'l
•,
tl Uoc19
11i,II
is.io
j'9,O
(1",.,9
14 !JO
5H,-t
O.2&'i
l.'ï ~
1:1.64
1 :J.Ck)
456
-17,2
9.2
2U.O
17,9]
,\
X
"
.-r
Pr()O Its.. l'Il (;
l~t.II1(lard,
.ullllnC"iljll~Ji
v
71
5.1.:2S.I
l,l'lÎ
5. ~
X
-1. -~
t--.
)
l
4x'
U 5:1)( 152 x 25.-1 l
7100
l·t7~
lH}l x 10'-2x 12,7
Liti x 76x 6,4
2420
2,:}1
0,516
Ll.J2x ICr2x 12:ll2TX76X
12.r
( '()mii>re~
li6x
X
y-
1
'lI X64
tr2!)
,~)60
2-tZO
'fiS
X
,:,.-'-
r
Figure 9.13
Proor etes des prof res 3 chlrperre
t} [auteur Ol;uninako an millimètre:ç
t Haulellr.largcur
el
cm kiJOgTalnmes p'lr mètre.
f5p:üsseur en nlilli.uèlrE'$.
2. A/tlt!rlc611 St.D,UÜlrrl SIUlpt!lJ,
3. A"lerlcoll Standard CJI(IIlIlPl~.
446
~tmasse
El'l scier l,rHI€s SI)
.,2..1
3,93
0,454
45.6
30,9
2:1,6
'~.6
4"1,_"
14.rs
.10.0
;2.31
ao .9
3H,O
21,4
.50,5
0,516
2.1,6
21.4
2 fi)
1.074
0.16.'1
21.)2
2';,1
21.1
19.0')
14,58
12,52
40,.1
4-1,5
243
,
~.2
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
9.59 et ·9.60 Les figures suivantes montrent lin des pannpaux d'une auge
reiuplle d'eau jusqu'au niveau AA'. Eu vous référant à la section ~.2. évaluez la
profondeur du poinl d'application C!(' la résultante des forees h~rostali('I"('s agissant
sur le prullle:lu (centre de pression).
Problèmos
A--r~~~--~~~-,...-A'
--n---+--II--J
j\ __
"'
~...; I_-.--_A'
~
1
Il
li
~ b-I-
Parahole
b
Figure P9.59
j
--
FIgure P9,60
Le couvercle du trou d'accès d'un réservoir d't'au a WI diamètre de 0,5 111.
li est fixé au réservoir à l'aide de quatre boulons équidistants. Déterminez la force
additionnelle du(' à la pression d't'ail sur chaque boulon lorsqu!" le C!':lItrt' du COllvl:'rclt: ('S( sitllé ù 1.4 HI {'II (It·s~ou· du ilh'C'1I11 d'eau.
9.61
Figure P9.61
11ne trappe tr'1~5.?.oycla le \'CI"1icul" S('r1 dt' SOt'PilPC dl" sO,'el « Elle est
ganlée eu POSitiOl1 fermée à l'alde de deux ressorts tel qu'illustré. Sachant qut'
chaque ressort exerce lm couple de 1470 N· In, déterminez le niveau d'eau ri nécessaire pour qUE' la trappe S·OIl\Tt".
9.62
·9.63
Déterminez
la coordonnée
x du centroïde
du volume illustrp. (Sugf!l'stinns:
Figure P9.62
a) la hauteur !/ du volume est proportionnelle à la coordonnée x; b) envisagez une
antllogje entre cette hauteur ct la pression d'eau sur une surface subillergée.)
Calculez la coordonnée> x du centroïde dit \lO)'H11.,. illt usrré. CC' \'011l111t' il
étt obtenu (.n c.:ollpunt un C)tlindrC' cllipliqllt' pnr url pla" ohliqll(' (r(or('r('z-volls à lû
suggL'stioll du JJToolèlllt· 9.G:3).
·9.64
'1
,.-- --1 "
Ij
....
/
7
111111
6·.
--
FIgure· P9.63
rurn
Figure P9.64
"9,65 Démontrez yUl' Il' système Je fO'r<:éS hydre tatlques agissant sur une
surface plane' submergée d'aire A peut être réd1lit à la force P appliquée au t'entraide C
de la surface et à deux couples. La foree P est pcrpcndtculatre À la surface' C'I
vaut P -_'Y••\'ij sin O. où y est le poids VOIUH.iqll<.' <1" liquide. Les couples sont
~t.r'= (rI;r' sin 0)1. et l\'~.= (yI:r'y' sin O)j. où/x'!!' = f x'y' tlA (section 9.8). Notez
que les c(}lI[)IC"s sont ind~p('l)rlanlS c!t' ln (lrofOlldf'llr à laquelle se trouve la surface.
!J
Figure P9.65
455
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
,~ moins qu'il apparaisse évident que l'un des axes correspond à lm.....et
l'autre à lmint on mbsntue une valeur de O~II dans I'ëquanon 9.1 pour
déterminer lequel des deux donne le moment d'inertie maximal de la
surface par rapport il. O.
Par ailleurs. ~i
une surface possède un axe de symétrie passant par 0
(section 9'.8), il :il'agjt forcément d'un axe prtncipal de cette surface par
1'81J:pOltil. 0; cependant, un axe lJI'inclpru 'n'est I)US toujours un axe de symétrie,
l\vec ou sans ase de symétrie, une surface a toujours deux axes principaux
(l'inertie par rapport à un point quelconque 0,
Les propriétés établies valent pour tO~btpoint 0 situé à l'intérieur ou ~..
l'extérieur d'une surface donnée. Si le point. 0 coïncide avec le eentroïde de
la surface, tout ~1.'Xe
passant par ·0 devient un axe central. 011 nomme axes
cerareux ]Jrin.:ciplfUX «([·in.ertie)de /(1 SlJ..Jj:aœ les dellX axes principaux cie l'aire
<1é.6ni par rapport à son centroïde,
Copyrighted rnaterial
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
466
f~
rllpartlo::>: rr...t>tmJllti d'ane:tlo
Vi
!I
11-----
I,,----i
If-----lt, ---->01
.--=---.~r~_--r
r'
-o:::t-.-,...--1----_,.~-.::--r-.-~
1•• lg
-1'1/
-l.-y.
Il
(g}
~--------1
.. --------~
(bl
que l'angle XCX' (ligure 9.19b) est deux .fois plus grand que xOx'
(ligure e.l9a). Pal- ailleurs, le diamètre X'Y' défir.dt les moments IJt" 1!J0' et
le produit d'inertîe ir,u' d'une surface donnée pal' rapport aux axes perpendiculaires Xi et y' fonnant un, angle f} avec les axes x et y. Oô o15tient Je
diflll1èb.'e Xi Y' en faisant tourner (l'un angle 2fJ le diamètre 'A'Y, ElSSocié
aux moments Ir. l, . et au f>tOO\l:Jt d'inertie l~.La rotation qui ramène le
diauilètre cr sur rf/y' (fl9'lï~9.19b) est de même SCJ1Sqlle ("'elfe qui déplace
les axes x et 11 sur x' et y (figure 9.19a).
Le cercle de Mohr n'est [JaS réservé aux solutions gtn{)bique:s. c'es..tà~dite celles où l'on mesure les paramètres sur des diagrammes précis. Une
ébauche du cercle de l'\flohrcornbinée à ]'utilis.ttion judIcieuse dë la trigODO.
métrie permet de dériver les relations nécessaires à la solution algébrique
d'un problèfite donné {PR·O.e ).
Copyrighted rnaterial
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
470
Force-s reparues
fY'.omel'fts d
valeur minimale du moment d'lnertÎt' dl' la surft\Cc'è par rapport à lout axe pa....sant
par C est Im.in = 0.300 x lOf; mm", À l'aide du cercle de Mohr; calculez:
nE!ltlfl
l'!i dl' III $urfac·(';
(1)
le produit d'inertie
b)
l'orientation ~~ axes prinei palLX;
la valeur de 1.1\....,.'
c)
9.104 et 9.105 ,\ J'aldo du cercle d," Mohr, déterminez J'orientation des axes
centraux principaux et les valeurs correspondantes des moments d'inertie dt' là
section des cornières illustrées ci-dessous. (Les propriétés de la section des cornières
sont données à la figure 9.13.)
!II
tft
mm-i
19,05
12,7 tllllfi
11
6, 1.
.~
.,
-
~
r
- L 121 x 76 x 12.1
25.2
Iii III
(
.:' . _:ar.:- .
111111
.:
C
:~I
Li6x51)( 5,4-
...
•
x
C
J
t
,~
51 lIl"l
L271 min
]2 ..52 Illlll
••
44.5 mm
7r. "lin
. 112.1 n'Ill
--1
-6.41f1nl
Figure P9.104
~761nm--l
Figure P9.105
·9.106
Les moments et If' produit d'lnerne d'une surface do~ée par rapport
li deux axes centraux orthogouuux :r: ('t IJ sont respecûvement 1( ... 1200 mm"
et 1'.1 = 300 mm", Sachant qu'après la rotation (1(-'$ axes de 30° (l,,\I)$lc 5('IISulltihorairc
autour du centroïde le 11101l1ent d'inertie rek,Uf à J'a.\;t· des r est de 1450 Il)111'', déterminez à l'aide du cercle de Mohr:
l'orientation des R,.Xt'$ princtpaux ,
les moments centraux prîncipaux d'inertie.
a]
J) J
1ue.
_ 9.107 On sait
pour tint' surface donnée. I!I ;;;; 48 X 1Cf mm' et
LIlI = -20 x lOU mm , x et !I étant des axes centraux orthogonuux, L'lI.X(' œrrespondant au produit d'inertie' maximal est obtenu en faisant pivoter l'axe des r autour
de C do 67,5° da os le ens antihorurrc. )\ l'aide du cercle de Mohr, déterminez:
-
le moment dlnc>rtil" 1" dt' la :oIlIrfa('(';
les rnornents centraux principaux c!'i,\('r!ic.
a)
,,)
9.108
À raide du cercle dl' Mohr, démontrez <4ue pour Lout polygouc
(telle pentagone):
u) le moment d'inertie est identique
Cf: ntroïdc
IJ}
roguUcr
par rapport à tout axe passant par le
;
le produit d'inertie est nul par rapport
11 tOlll s)'strn)<, d'H.:Ct'S
orthogonau
(x. y) passant par le centroïde.
À l'aide du ce rel" (1(' Mohr, P"""'CZ qu(' l'exprcsslon l.r,l~/ - 12x''J''
où Ir" l'J' et 1.''J' représentent les moments et le produit d'inertie d'une surface
cfonnne par rapport à des axes orthogonaux x' et 'J' centrés sur 0, est indépendante
d(' l'oriclItltliOTl des a.~('Sx' et y'. Démorurez ('lIsuitl' {lue cette ospression est ~g31e
au carré de lu longueur de la tangt'nte tracée entre l'origine du système do <-'00[données et lé (,'(;'1"(;1
... dt, Mohr,
9.109
En IltilL sant la propriété démontrée ail problème précédent, exprimez
le produit d'inertie T,y d'une sllrf~ICI' .rI. par rapport l\ des A.,XCS orthogonaux (x ct y)
9.110
O. en fonction des moment d'lnerlie'. ct rI) de A ct des
moments principaux d'inertie ',nbl et I,n.u dt.' .t\ par nlpport à 0, Finalement,
appliquez cette formule pour calculer Je produit d'inertie 1,,&de la section de la cornière
pa.ssant rar Je
point
de 76 mm X 51 mm X 6,4 tl1111 illustrée à la figure 9.13, sachant que son moment
d'inertie maximal est de 0.52.1 X 1()6 10014•
Copynghted matenal
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
par (A.t)h {J\y}. et (A:)l les termes des trots équations av-.mt de les additionner. On obtient
Eu comparant avec 9.46. on \-tQit que le membre de gauche de l'éqtlaü"On
représente le moment d'inertie du corps par rapport àl'axe principal associé
il KIl; il diclit donc le moment principal cl'inertie eotrespondan,t à cette
racine. Par a.illffilrs. l' équsnon 9.51 permet de str:nplifrer le membre de (troite.
qui devient égnl à Kl' 01. Ct) déduit qlte KI est le moment pnnctpsl d'inertië.
'En appliqu.ant le même (aisOnl1e~e~~011d>~mol~tre
fuci1~nlentque ~ et 1<.,
sont les deux autres moments pnJlClpatlX cl mertie tltl
solide.
Copyrighted material
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
PROBLÈME RÉSOLU PR·10.3
J--d--t~\V
•
~
L
·~II_.
~.I
~ __
2
!
Une table dl." levage- hydraulique' CSI utilisée polir SOIIJ ver des
caisses de 1000 kg. Ut lullie est eonstltuée d'une plate-forme et
de deux mécanismes identiques, disposés de chaque côt~de la
plate-Iorrue. Sur lesquels des vérins hydraullques appliquent
des forees égales (mit' seule moitié de l'ensemble est illustrée).
Les membrures EDB et CC mesurent 2n et la membrure AD
est articulée au point milieu de EDB. La caisse est placée sur
la table de sorte que le systèmE' illustré supporte exactement
la moitié de son poids. Sachant que e :;: 60°, a = 0,70 m et
L :: 3,20 11\, d~t(.'flnilll~lla forte développée par clluquu cylulc.lre
pour soulever les crusses. (Ce mécanisme a déjà été traité au
problème résolu PR-6.7.)
SOLUTION
LI" machiuc (.~ttldiéoeest constituée de Iii plate-forme et du mécauisme, avec uue force à l'intrant F DU créée par le vérin et une
force à la sortie égruf' el opposée à !W.
Principe du lra\'uil virtuel. Dans un premier tCl1l1}S, on
observe que les r(oaclions aux points F. t't C 11(; produiS 'nl pas de
lmvail.
Si 'J -;;; hauteur rtl' la plaie-l'Orme par rapport à la base,
s = lougueur Dl! de l'ensemble cylindre-piston.
ou écrit
E.
f>U
-"'!
0:
(1)
Le déplacement vertical. ôt} de Laplate-forme,
exprimé en fonc-
tion du déplacement <\nglllrurc 58 de la membrure EDB, est
'J -;;; (EB) sin () = 2n si" ()
~ =
_ _-
-----------,
.....
By
Pour exprimer 8.~en fonction de SO, on ulilis(' la loi des cosinus :
SZ
. _.,
-.;-
.
.
211 ('O!> 0 50
==
+ L2
02
-
~/L CoS 8
~
00 dérive l'éqna.LÎon C't on obtient
0) 50
2v 86 = -2aL(-sin
'1
al: sin 8
œ=
Il
.,
59
En substituant les expressions obtenues pour Sf) et 65dans l'ëquation 1. on écrit
fiL sin 0
{-t\V)211 cos () SO + F VII
80 = 0
li
F Off
des données
Liusertion
s
:::; '{f.- oot fJ
L
ou problème
lV = tilg = (1000 kg)(9,81
y2 ",. a2 + L2 - 2nL cos (}
Il
:;; (0.;0)2
=:
9810 N = 9,81 k r
- 2(0.70)(3,20) cos 60°
= 8.49
s = 2.91 ln
F
VII
524
+ (3,2.Q}.2
rn/52)
dans ces équations donne
,
= \V-L
t'CIl
0 :::.(9 81 kN)
'3,20
9,91 ln
oot 60°
m
Fou = 5.1') kl\:
~
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
On choisit lm s)'stèlne de référellœ dont on place l'origine en il..
Sachant
qlle l'allongemerIt du ressort nlesure ft partir de sa position neutre est AB :;;::ta,
on écrit
On e.\-prime les coordonnées
X8 :;;:
21sin
X8
e
et Yc eu fonction de 8; on a
!le -l cos 6
\'g ". "t'{l cos 6)
Vl! = ik(21 sin 0)2
V = V.. +
2k1}! sirli
"Il: ""
(J
+ 'W''1' cos
e
(10.22)
,00 trouve les pas.itions d'équilibre du s~'ième en faisant éf,raler à zéro la
dérivée de J'énergie potentielle V. Ou écrit
d\'
l
(,f)
.
= '1/;::[2 sin 8 cos e -
\iVl .'>.Ï.ll 0' "'" 0
On met en évidenœ 1 sin .()et l'expression devient
av
= 1stn O(ti/cl cos (J (lf)
'~V)=
0
Il. Y 1) donc <leux posittons d~équ.iJibre, œrrespondant
et e = cos"! (W/4kl) respeetrvement''.
aux valeurs 0;;;; 0
~10.9 ÉTATS D·ÉaUIL.JSRE
Considérons les tiges uniformes de longueur 2ft et de poids W illustrées à.la
figu.re 10.14., Les trois tiges sont en équilibre mais
Ulla
(lifférence importante
les distingue. Dépleçons lëgërement chaque tige de sa position d'éqtlilwIe
et relâchons-la ensuite: ta. tige a reviendra à 'a position irutiale, la tige b
continuera de s'éloigner (lu point d'éq'uÙibrê et la tige c eoaservera sa nou-
velle position, On <lira que l'équillhre de la tige
tige b est instable et que celui de e est neutre.
(J
est mble. que œJ.ui de la
B
»
(lI) Équilihre staWe
B
(e)
&tuiJIbre neutre
Figure 10.14
RappelollS que l'énergie potentielle t,rravitatioJUleUeVg est égale à '!VYt
où y représente lu hauteur du point d>application de W, mesurée à l'mir
d'un nlveau de référence aibitmite (secl'iott 10.7). On en déduit 'Ill'à L':iposi.don d'équilibre con ...idérée l'énergie potentielle de hl tige li, est mirlÎJJlaie,
celle de la tig", b est iJlàA:irl1aJe a}<.))'s
que celle de la tige e demeure oon.stmlte.
Léquilibre sem donc stable, instable ou neutre selonque la...
ral:e\u·00 l'éne~
potentielle est mÜlimale, maldflilale Ou eonstante (Ggtll"tl 10.15).
Copyrighted material
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
10.59 Solutionnez le problème
section 10.8.
10.29 à l'aide de ln méthode présentée
10.60 Solutionner. le problème
section 10.8.
10.30 à l'nlde do la méthode présentée à la
10.61
À l'aide de III flléù)(xle présentée
à la
il 13 section 10,8, solutionnez lÉ'
problème 10.33.
10.62 À l'aide de la méthode présentée à la section 10.8. solutionnez le
problème 10.34.
10.63
Solutiunnez 1" problème
10,35 à l'aide de la méthode présentée à lu
section 10,8,
10.64 Solutionnez le problème 10.36 à l'aide de la méthode pré entée à la
section 10.8,
B
10.65 À l'aide de ln méthode présentée
problème 10.31.
à la section 10.8, solutionnez le
10.66 À l'aide de la méthode présentée
problème 10.38.
à ln section 10.8, solutionnez le
10.67
Démontrez que le mécanisme
décrit au problème 10.1 est en ëqut-
libre neutre.
10.68
Démontrez que le mécanisme décrit au problème 10.2 est eu équi-
tJbre neutre.
Figu:re Pl 0.69
10.69 Deux barres uniformes, chseune de masse fil et de longueur l, sont fixées
i\ des poulies reliées par une courroie (6hrlU'(~ PIO.69). Aucun glissclncnl ne survient
entre la courroie ct les poulies, Détermlnoz les positions d'équilibre du système et,
pour chacune de ces positions. établissez l'état d'équilibre (stable. instable ou neutre),
ro
10.70 Deux barres uni rm es, chacune de masse III ct de longueur " sunt
ûxées à des engreoages tel qu'Illustré, Pour des angles () compris entre 00 et 180°,
déterminez les positions d'équilibre du s)'stètl1e et. pour chacune de ces positions,
dites si l'équilibre est stable, instable ou neutre.
D
540
FIgure P10,70
C P
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Travail d'une force
Dans ln première partit> dt' t't' (·IH'J,itrp.. non-, 0.1\ ons pt~t'I1(( le principe tlu
tmcatl t irtue ct sex applicauons l>uur résoudre des problèmes d'(o((1uLiurc,
~O1l5 avons d'abord d~jlIl11(,trnvni! d'unrjorc:
Ji' corrcspondau: fi lin clépl(lc...·,lll"nt in.fiuitésillUll
(section 10,2) Je sorte que
ur
llU - F' (Ir
(10.1i
c'est-à-dire (ln,~IICI est obn-un l,ur l,.>produit scalalre (le la force F ct du
dé-plilt'('HI('nt (Ir (f1Wlrt' t(',16 i\(lIIS avons nlors
litT - F ils cos cr
(10.1' J
1\
Figure 10.16
F,•
011
(/(1 - travail Je ta force F:
F - gl .UIÙl'llJ' Lit' la forcl' F,
ils = grandeur du déplacement :
ct = angle {uriné l'nt ri: F ('l (Ir.
Alors,
au»
(lU
Cl
= Il
si
Q'
<
9()~;
sl Cr = SOu;
clU < () si
ct
> 90':).
Le tri/t,;aU r/'ull COUplL'(/1.' montent ~1 tlgiS!it1ul sur un corps rigidl' se calcule par
,lU - .\1,10
oü dO = angle lllfillitt!!iÎlnaJ <1(,rotation
Figure 10.17
Déplacement virtuel
546
du c:orp ...l'\11!illlé en radians,
une particule srtuéc an pulut .\ cl qui subit l'l'tli.:l Ul'S
forees F,. F~,
....Fil (section 10,3) !lUIIS avons llnag'lnf> (11It' lu pnrncule se
déplaçait au point •\ r ln~tln.'10 17) PUiS<JUl' cc déplacement ne 'il réalise
pas réellement. CJn l'appelle (/ëplfICClIll"lt virtuel el OJi 1e, désigne par ôr. tandis
Eu cousidérnnl
h· trav'llil correspondnut
p.tr St. (l'oil
qU('
Principe du travail vlrtuel
(] 0.21
IlIIX
Iorce
c;
est appelé traunil cutuel et d<~sign~
Princip« rh, trllle/i! t lrtucl : 'îl Ullt' particul« (','if t fi (.1(/,,#1/111 C, le tracall otrtue!
lota! 8l} (l('~ [orco« flgi.\stluf sur la partlcul« est 11,,1pour tout (lé,,1(/('Cllwllt
cirtuc! dt la particule.
Ce principe pellt ...appliquer par t'\it"IISifJl1 aux ('orp rigtde~ et. dt·.;
assemblages de COI]>S ri~itll".\.Etant (tonné (lU Il n'Implique <fliC (1~·~
[arces
l)n)(,,';~(JtI( 1111 tl'lIrail, il nous pcnnet une solution dt> I"t'('h:lngt" il l'unhsatron
tics équations d'équllibrc. Le principe du travail vtrtuel t1st très t,ffit';)(:e In1";
(le l'unulvs(.. dt' ,nt>('111I1S1nl''\et dt:' machines ccnstitues d'éléments rigides
reliés entre ('U'. Dans dl ll·l.. ("US. Il' truv a.il llt>~ réuctions tUl' HPl>lIis esl 11111
et le travail <Ic<;lorce internes 'UlX liaisons s'annule (SCCÜOtl l O. ~ et PR·l 0.1.
l'R·I 0,2 el PR-lt).3)
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
550
10.108
Une tige mince de masse 111 et de longueur lest attachée au
manchon 1\ ('1 s'appui(' s,Ir un c)'lind~~ <1(' l'nY(1) r, En n~lig('anl l'cff('! du Ironement, calculee la valeur de l'angle 0 qui correspond à l'équilibre du système, sachant
que 1 = 180 mm et r = 120 ium .
Méthode du IntV"dll vir1ust
..\
Figure Pl0.l08
10.109
Le manchon B illustré gUsst' sans frottement sur 10 barre AC. 1J est
attaché ù l'aide d'un pivot à un bloc sc déplaçant dans un guide. Écrivez une formule
pour calculer ln grandeur du couple ~fnécessaire' pour matntenîr
mathématique
r('qllilibrc~.
p
!I
c
p
t\
l,v
figure P10.l09
Figure Pl0.110
10.110
Deux manchons ....
\ et B sont reliés pur un câble ,,'\B. lis se déplacent
frottement sur des barres tel (IU'illllstr(i. La longueur du câble est de 440 mm
ct Il' potds dll lnancboll/\ est w ...90 '. Calculez 10grandeur de la foree l' néœssake
~lU1S
pour assurer l'équilibre (Ill système lorsque:
Cll r"'; 80 IIlIH;
,))
C'
= 280 mm.
La bnrre ./\8. dl' poids lI~glig(·<)bl(.',peut gli ''l'r IibrelH\!llt sur 1~ sol
l't ltur la surface in('IiIlN'. r)6dlllsf"Z Hill' I"orllllll(' Il'Ialhç.tl1:ltj(jLl~pour calculer la
gr.,ndeur de la [oree Q nécessaire pour maintenir l'équilibre.
10.111
Q
Figure Pl0.111 - Pl0.112
10.112
La barre IVJ de musse ln = 2,55 kg pE'ut gLisser liurClllellt sur le sol
ct sur la surface inclinée. Sachant que P =
N, {J = 500 et 6 = 20", calculez la
grandeur de la force Q nécessaire pour maintenir l'équilibre.
~o
Copynght d ma nal
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
554
AnnellO
Dans Ip système impérial, l'utilisatlon des poid:s en livres force au lieu
del>masses el! slugs simplifie l'étude de la statique. Par contre, en dynamique,
(Il', on t;'lit aI)LJeI aux forees, aux masses et aux accélérations, on utillsera
les slllgs pour les l'nasses, et les livres f()rc.-cpour les poids, où \V ~ lu.g
(\\rr ~ poids, III
IIla$S(~,et g = accélération terrestre).
Voici d'autres unités de mesure souvent utilisées dans le système impérial:
- J(! ruille (ml). qui égale 5280 pieds (I)i):
:::0
-
Je i)Ull(,:e (pu), (!IIi ~gale 1/1:2 de pied (pi):
la tonne (T), qui égale 2000 livres (lb).
On peut imaginer la complexité df's calculs
une vitesse de 30 JJlilh en pi/s.
pOlir
convertir.
I1HI'exemple,
A.2 CONVERSION DES POIDS ET MESURES
Pour siruplif 'r les calculs nécessaires au passaue du système métrique ou
internaticual (Sr) au système impérial, nous présentons à ln page suivante
une table de conversion des III esures les plus communes,
EXEMPLES DE CONVERSION
Les exemples ci-des ous illustrent la procédure à adopter
pOlir
convertir des
" Clt'autre .
moments ( l'un S\'SteI11P
•
Exemple 1
On veut convertir un moment de 40 N: rn du système métrique (SI) au
sj'sti'II)t'
impérial.
Solution
~I = -10 N'Ill = (N'Il))
.
(1))(
II f
.
4,448 N
1 1)1
)
= 29.5 lbf'- pi
0,3048 m
Exemple 2
011 \'E-'111
convertir
1111
moment de 47 lhf': po en svstème international (ST).
SO/t,tÎ07l
~1 = 47 lbf'- po = -t7(4.-141'3N)(25,-t
n1111)
= ;:>310N '111m = 5.31 N
'ln
Copynghted matenal
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Tatllnaux et ligures u111es
Moments d'Inertie de formes
Moments d'inertie (masse) de formes
géométriques courantes
géométriques courantes
I(
Rt>t",,~
• /1 /.1/,
,
~. 1 • J..loh'
r
-
Il
.
f'
r-
1tI(" "'UIU'
,~..l, -
~
1
'1
f7 \
11
Jr•
A",""f . ha)
1• = -mr
l
">-.
I!
C
\
.'
li,
l'IW:I"' rl"'Ci",,!!:,o.1.l ...
' . "",
-
I-IJ-l
••
C.'rcll~
Y
l&
\
l, ,.,"',.:
0
t
P.lr.olll'l(.pil"\ot. •
Ir ,~
,pn'lrn'
,,-
If
I.
ri
",.
fl·"t''''~I!.aI1"I''1
../'f-
J U ,...Lofr'
!
=
-
_
J,:'~..,..IL'r-1
l)i)l~UL'",Ull.,
'1
·C
o ~,--i
1/
'1
mr-
-
C\ hJt,-ln' nrl'ul.u:n·
de l"'tek
',l,
1• = .,
1
ma«•
,_,
• 116s:
+
'
: 1 Il rf
J ,~,
" - "
1. 11111,1
t=
,~
... , '" :'",:
1 ::
1
1 11111)1. ,..::,
I~
1
I~'" ~ • nl,
1,
1
i: mll~
• 1:
r:-
.' 1
l~
l, '"
f __ 1 bl,l
r
,
rel
•
1 = -1 ,,~,
,
...
minee
1
.~
QilJlJ1
I
0: onl.'
'•• ~I,JI,
~
1.
I!
1,
1
TrifU'gl,;
-1, .1I,!.1
,:
li'
561
r·
,~= t. = I~ ",1:ltlJ
+
L!'
J " - !.o:~
k
'1
1
t, = 111",1.1"
'1
<,
F.lllpw
0
../
r--"-
-li ....",,/,'
,
"
1/
('l "
, . ,l,,, ,1"1.• 112\
1 • 1 -
r./M li ,01,,11""lf'"
'I·!·'II'/,
J ! "IJla' - /,J)
1
'"
JI
'1
~pJ."r..
' .•
Iv
:II:
1:. - .. lua.1
C p n
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
566
Index
Compression,
Concourantes,
Embrayages à disques. 405
Encastrements, J48-149, 174, ]7,1)
68, 322
forces. 1.5
Éner~e potentielle. 536 •.5.17
Entrée.
300
,
Equation d'équilibre
pOUT un corps rigide. 146
pour une particule 31·.32, 51
f~qllilihTe
Constante du ressort. 534
Contreventcrnënt, 283
Corps
soumis à
(Jeux forces, 166-167
trois forces. ]67
Corps rigide(s), ;t 66
équilibre d'url
clans l'espace, 174
d'lin corps rigi(lc
JaJ\S l'espace, 174
(lans un plan, 146-174
dans lin plan, 146-175
dtagrammc du corps libre d'un, 1-l6
instables, 151
Cosinus directionnel. 4..l
COIlI)le, s, 9R-) 01
additiou de, 100
équivalents, 98-100
Courroies, 413-4 J 4
Cric, 395-396
D'Alembert.
Décimètre.
Ff'n ne, 259
Flèche, 354, 36--1
Jean, 2
1.
Forœ(s),3
Décomposition d'une force
concourantes, 15
dans l'espace. 39.43
dans Ill) plan, J 6, 22-9,3
cn une torce ct un couple, 101-102
conservative-,
hydrostatiques, 225, 433
interne, 66
dans un élément {le structure, 257, 322-323
(III membre, 260
virtuel, 518~522
Deuxième moment, 432-434
Diazrarnme
l">
de l'effort tranchant, 332
de MèL't\VeU, 262
réparties, 19B
sur des corps ligidcs, 65-135
SUj' une particule
duns l'espace, :19..51
du corps libre, 3L 146
équilibre d'une particule et. 31 =.12
(lu 1I101ltf!lIt fléchissant, 332
Direction d'un vecteur, 1.3
Distributif, produit scalaire, 83-84
Dynamique, défirtition cie la, 2
ÉJétnt>nts différentiels
ct centroïdo
d'un volume, 237
d'IIIlé surface, 213
pOlIr moments d'inertie
(les solides. .. 75
des surfaces, 434
Ellipsoïde d'inertie. 491-49.2
.5..15
coplanaires. 15
dc contraintes. 141
érlulvalt'utt's, 61.68
externe. 66.68
Degrés de liberté, 535, 537
Densité, 234
Déplacement, 516, .517
EITc)rt nul, 263
Effort tranchant, 322. 330-342
Jiagnunnle de t 332
,
Élément à effort multiple (mulülorce),
d'une particule
dans l'espace, 51
dans un plan,,30-:31
éqnarion {t:(Jir Equation d'équilibre)
instable, 536-5.17
ne utrc. 5,16-5~7
stable, ,5.16~')37
Espacc,2
d~lJ1Sun
plan, 13-2.5
Forme du déterminant
pour les produits vectoriels, ï()
momeut de l'Oree
p<lr rapport à un axe, 86-8ï
[lar l'apport ;\ UII point, 73
pour un produit mixte, &5-86
Freins à hau(le, 414
!>l)llT UII
28.5
Frottement.
37ï -414
angle de, :179
cinétique, 378
anglE' de, :379
(,.,()t'f6Cient
riE", 377-319
courroie et, 413-4]-l:
d'un axe, -tt)3-40,)
(le Coulomb, :377
cie disque, 405
,
Copynghted matenal
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Sources des photos
Couverture:
Derek Croucher/First
Ligllt
Chapitre 1: Bill Sanderson/Science Photo Library/Photo Researcher
Chapitre 2: d'Arazien/Image
Bank
Cliapitre 3: John Coletti/Stock, Boston
Chapitre :1:: l', Zimmerrnann/Fl'C
Chapitre 5: Bruce Hands/Stock, Boston
Chapitre 6..: JelT Gna rs/Stock Market
Chapitre 1: Brian Yarvin/Photo Researchers
Chapitre B: Wayne Hoy/Picture Cube
Chapitre 9: Paul Steel/Stock Market
Chapitre 10: \VolfVon Dern Bussche/Image
Block
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.
Vou have either reached a page that is unavai lable for vi ewi ng or reached your vi ewi ng limit for thi s
book.