Systèmes Séquentiels : Logique, Chronogrammes et Auto-Maintien
Telechargé par
hamza ladib

COURS DE MÉCATRONIQUE I - IMC 325
Département de génie mécanique
Chapitre 4
SYSTÈMES SÉQUENTIELS
Objectifs spécifiques
Dessiner le chronogramme décrivant un système séquentiel.
Concevoir une commande séquentielle simple avec l’auto-maintien.
Choisir entre une commande logique combinatoire et séquentielle.
01000110101001010010101010101
01010101010101010101010101010
101010101
Q
S
R
temps
a
a
b
b
b
D
( )
a
c
c
c

Table des matières
1. DIFFÉRENCES ENTRE LOGIQUE COMBINATOIRE ET LOGIQUE
SÉQUENTIELLE 2
2. LE CHRONOGRAMME 3
2.1 Chronogramme 3
2.2 Événement: front montant et front descendant 4
3. L’AUTO-MAINTIEN 6
3.1 Avec priorité à l’activation 6
3.2 Avec priorité à la désactivation 7
3.3 Méthodologie de conception 8
3.4 Exemples d'application de l’auto-maintien 10
4 EXERCICES 15
4.1 Chronogramme 15
4.2 Mouvement pendulaire d’un vérin 17
4.3 Commande d’un moteur électrique 18

Systèmes séquentiels
1. Différences entre logique combinatoire et logique
séquentielle
La logique combinatoire ne possède pas de mémoire, il ne peut y avoir de séquencement automatique des
actions de la commande.
Lorsque l'état d'une variable de commande dépend non seulement des états des variables mesurées mais
aussi des événements précédents, le problème est dit "séquentiel". Le concept de mémoire doit alors être
introduit. La figure suivante illustre ce concept.
Problème relevant de la logique combinatoire :
BP1 ouvert, la lampe L1 est allumée et la lampe L2 est éteinte.
BP1 fermé, la lampe L1 est éteinte et la lampe L2 est allumée.
Les 2 états sont uniquement fonction de BP1.
Problème relevant de la logique séquentielle :
D’abord, BP1 ouvert, la lampe L1 éteinte et la lampe L2 allumée.
Puis, BP1 fermé, la lampe L1 est allumée et la lampe L2 éteinte.
Puis, BP1 ouvert, la lampe L1 reste allumée et la lampe L2 éteinte.
Puis, BP1 fermé, la lampe L1 éteinte et la lampe L2 allumée.
Puis, BP1 ouvert, on revient au début (L1 éteinte, L2 allumée).
Les 4 états ne sont pas une simple fonction de BP1, le ‘séquencement’
joue un rôle important.
L1
L2
BP1
Logique
Combinatoire
Mémoires
Entrées
Sorties
Commande
séquentielle

4. Systèmes séquentiels
4.3
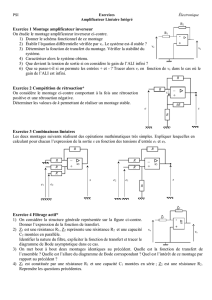
La figure ci-dessous illustre l’effet de séquencement. Pour le problème combinatoire, l’état est uniquement
fonction de la variable BP1 de commande. Ainsi, la connaissance de la variable BP1 suffit à déterminer
l’état du système de commande. Si BP1=0, la partie commande est à l’état 0. Si BP1=1, la partie
commande est à l’état 1. Donc, pour cet exemple, “ état de la commande ”=BP1.
Par contre, pour le problème séquentiel, la partie commande passe par l’état 1 afin d’accéder à l’état 2, puis
à l’état 3 pour finalement revenir à l’état 0. Le changement d’état est caractérisé par le changement de la
variable binaire BP1, mais la variable binaire BP1 ne permet pas de déterminer l’état de la commande.
Ainsi, si BP1=0, la partie commande peut aussi bien être à l’état 0 qu’à l’état 2 ; et si BP1=1, la partie
commande peut aussi bien être à l’état 1 qu’à l’état 3.
Il est important de bien séparer l’état de la partie commande et l’état des variables de sorties. Ainsi, la
même combinaison de sorties “ L1 éteinte et L2 allumée ” est présente à l’état 0 et à l’état 3.
BP1=1
BP1=0
0
1
0
2 états fonction
de BP1
4 états fonction du
séquencement
3
1
2
BP1=0
BP1=0
BP1=1
BP1=1
L1 éteinte
L2 allumée
L1 allumée
L2 éteinte
L1 allumée
L2 éteinte
L1 éteinte
L2 allumée
Diagramme d’état de la commande combinatoire (à gauche) et séquentielle (à droite).
Pour déterminer si le problème de commande est combinatoire ou séquentiel, la question qui se pose est
“
la donnée de la valeur des variables d’entrée suffit-elle à déterminer l’étape dans laquelle se
trouve l’automatisme
”. Si la réponse est à cette question est oui, le problème est uniquement
combinatoire et la commande d’une sortie est une fonction logique des variables d’entrées. Si la réponse
est non, le problème relève de la logique séquentielle.
2. Le chronogramme
2.1 Chronogramme
Le chronogramme représente dans le temps l’état d’une ou plusieurs variables (binaires dans le cas qui
nous intéresse). Il permet notamment de visualiser l’influence d’un “ événement ” sur l’état des autres
variables. Les flèches verticales permettent notamment de visualiser rapidement la causalité des
événements. Le chronogramme est un outil de description des automatismes. Ainsi, le cahier des
charges d’une automatisation peut être décrit par un chronogramme, ou diagramme temporel, qui

4. Systèmes séquentiels
4.4
représente graphiquement les variables binaires au cours du déroulement d’un cycle du processus. Le
chronogramme comporte une ligne par variable de commande et une ligne par variable de sortie.
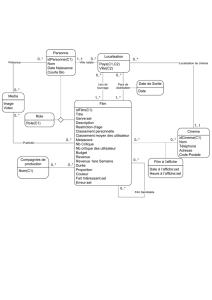
La commande combinatoire des deux lampes L1 et
L2 à partir d’un unique bouton poussoir BP1, de
l’exemple précédent, peut être énoncée à l’aide du
chronogramme ci-contre.
Les flèches verticales ne sont pas indispensables.
BP1(t) 1
0
L1(t) 1
0
L2(t)1
0t
t
t
BP1(t) 1
0
L1(t) 1
0
L2(t)1
0t
t
t
Chronogramme
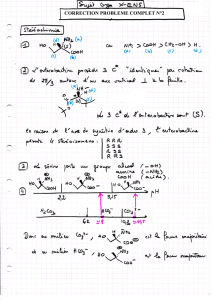
La commande séquentielle des deux lampes L1 et L2
à partir d’un unique bouton poussoir BP1, de l’exemple
précédent, peut être énoncée à l’aide du chronogramme
ci-contre.
BP1(t) 1
0
L1(t) 1
0
L2(t)1
0t
t
t
BP1(t) 1
0
L1(t) 1
0
L2(t)1
0t
t
t
Chronogramme
2.2 Événement: front montant et front descendant
Les systèmes automatisés sont regroupés parmi les systèmes à événements discrets. Cette terminologie
vient du fait qu’un système automatisé gère des événements. Pour définir le terme d’événement, on
considérera dans cette partie le cas des fronts montants et descendants. Le “ front ” d’un signal se situe à
l’instant précis où la variable change d’état.
Exemple
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%