Conception assistée par ordinateur des machines électriques Page 21
/A. BOUZIDA UMBB-FSI-2017
IV. Dimensions principales des Machines
électriques
IV.1 Dimensions principales de la machine asynchrone
Les principaux paramètres du dimensionnement sont géométriques (diamètre de d’alésage,
longueur utile, dimensions des encoches), électrique (densité de courant et charge linéique),
magnétiques (induction dans l’entrefer et dans les différents tronçons de la machine).
IV.1.1 Dimensions du stator
Selon l’utilisation, l’emplacement et l’encombrement les machines asynchrones peuvent avoir une
forme extérieure différentes. La Figure IV.1 montre les formes les plus utilisées pour les machines
électriques industrielles [4].
Figure IV.1 Différentes formes du stator
IV.1.2 Bobinages statoriques
Le circuit magnétique statorique est constitué d’un empilement de tôles fines d'acier découpées
faisant apparaître les différentes encoches statoriques. On utilise des tôles minces dont l’épaisseur
varie entre 0,35mm et 0,50 mm pour minimiser les pertes magnétiques. Afin de limiter l'effet des
courants de Foucault, on isole habituellement les tôles d'une mince couche de verni ou de silicate de
soude. Le bobinage statorique est constitué de deux parties : les conducteurs dans les encoches et
ceux des têtes de bobines.
Le calcul de l’enroulement statorique commence par le choix du type d’enroulement à utiliser.
Les enroulements sont caractérisés par le nombre d’encoches par pôle et par phase qu’occupent les

Conception assistée par ordinateur des machines électriques Page 22
/A. BOUZIDA UMBB-FSI-2017
conducteurs appartenant à la même phase et se trouvant au même instant sous le même pôle. On
distingue, suivant la disposition des têtes de bobines (connexion entre les conducteurs), des
enroulements concentriques et des enroulements imbriqués [8].
Figure IV.2 Distribution de bobinage dans les encoches statoriques
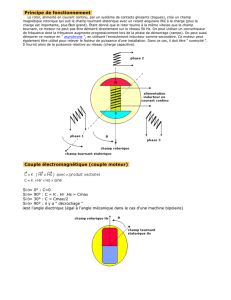
La Figure IV.2 montre un exemple d’un bobinage de 48 encoches du stator avec a 4-pole pour de
types de distribution de bobinage (concentrique et imbriqué), le pas d’enroulement est 11 le nombre
de bobine par phase et par pole est CPP = 4, Le schéma montre l’enroulent d’une seule phase.
Les différents types de distribution de bobinage utilisés permettent de réduire ou supprimer
certaines harmoniques d’espace.
Figure IV.3 Types de bobinages les plus utilisés dans les machines asynchrones triphasées
Une bobine est formée de plusieurs spires en série et la spire est contient un aller-retour d’un seul
conducteur. Un conducteur peut être formé de plusieurs conducteurs appelés « voie » afin de respecter
le diamètre maximal des conducteurs exigé par la norme.

Conception assistée par ordinateur des machines électriques Page 23
/A. BOUZIDA UMBB-FSI-2017
Figure IV.4 Bobine d’enrouement
Un enroulement statorique est formé de plusieurs bobines mises en séries pour former le nombre
de pôles nécessaires par phases. Les trois enroulements statoriques sont identiques avec un nombre
de spires par phase et par pôle identiques.
Figure IV.5 Enroulements triphasés avec connexion en étoile
Tous les faisceaux de bobinage positionnés dans les encoches ne sont pas forcément positionnés
de manière parallèle occupantes la surface totale de l’encoche. Il en résulte une légère perte de surface,
estimée par un facteur appelé coefficient de remplissage qui doit être limité 0.65<SFill<0.95.
=
é
(23)
La Figure IV.6 montre le remplissage des encoches.
Figure IV.6 Facteur de remplissage

Conception assistée par ordinateur des machines électriques Page 24
/A. BOUZIDA UMBB-FSI-2017
IV.1.3 Type d’encoches statoriques
Il existe une grande variété de formes des encoches et selon la puissance des machines. Parmi les
encoches les plus utilisés nous schématisons quelques formes sur le Figure IV.7. La forme des
encoches jeu un rôle très important dans la définition des harmoniques d’espèce, couple reluctant,
bruit et vibration [8].
Figure IV.7 Forme d’encoches statoriques
IV.1.4 Dimensions principales du rotor
Dans la plupart des machines asynchrones industrielles les rotors sont en cage rotorique. Les
dimensions principales seront calculées après avoir dimensionné la partie du stator. Le diamètre du
rotor est déterminé directement à partir du diamètre interne du stator en enlevant la longueur de
l’entrefer. Le choix de nombre des barres est lié directement au nombre d’encoches statoriques afin
d’éliminer certains harmoniques d’espace.
La Figure IV.8 montre les formes les plus utilisé pour usiner la cage rotorique.

Conception assistée par ordinateur des machines électriques Page 25
/A. BOUZIDA UMBB-FSI-2017
Figure IV.8 Formes des encoches rotoriques
Pour le rotor à double cage "empilée". Deux types de barres sont autorisés, et la cage peut également
être remplie par des conducteurs en fonction des pourcentages de conductivité PC1, PC2 et PCN.
Les dimensions des anneaux de court-circuit sont généralement applicables aux bagues
d’extrémité et on peut citer les types A, B, C et le type D.La vue de l’anneau est représentée sur la
Figure IV.9 avec 8 ailettes, c'est-à-dire NRFins1/2 = 8.
Figure IV.9 Anneaux de court-circuit avec ailettes
Les différentes formes possibles de l’anneau de court-circuit sont montrées sur la Figure IV.10
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
1
/
26
100%