Least Squares Induction Motor Parameter Identification Using Three-Level System
Telechargé par
islam.new9

A least squares induction motor
parameters identification based on three
level system
Bianchunyuan1,a,Liuhaijing1,b, Caoruixia1,c, Songchonghui1,d
1,2,3,4 School of Information Science & EngineeringˈNortheastern University
Shenyang ,China
d songchonghui@ ise.neu.edu.cn
Abstract—In recent years, with parameter self-tuning of the
drive is concerned by national experts and scholars, which has
become the focus of research. Because the induction motor has a
strong coupling, nonlinear, operating parameters and other
significant characteristics change, many scholars do a lot of
research on the induction motor parameters identification, the
parameters identification theory, many of the results of modern
control theory are applied directly to vector control systems to
develop into a high-precision vector converter. This article
describes an experiment based on single-phase improved
methods, the least square off-line identification, only one
experiment can measure the motor parameters. According to the
simulation results , we obtain a satisfactory result.
Keywords-least square; induction motor; parameter
identification
I. INTRODUCTION
At present, the inverter plays a more and more important
role in energy saving and speed control so that it has been
experienced rapid development and wide application. The
application of higher voltage and better performance inverter
gets more and more attention. Therefore, three-level inverter
based on space vector control is a hot topic in the future
development.
This study is based on the three-level system to research
the motor parameter identification. Accuracy of motor
parameters is an important factor in determining the inverter
performance.
The inverter with parameter identification technology
research can be divided into offline and online identification[1
2 ] two research directions. Offline parameter identification is
mainly used to complete the self-setting, identification of the
parameters of which is higher initial value of precision, or the
direct use value under not very high work environment.
Online identification key is used to track changes in the motor
parameters, calibration of electrical parameters to meet the
operating environment of relatively high precision. The main
methods used in domestic vector inverter are the least squares
method, model reference adaptive method, Kalman filter,
genetic algorithm and neural networks ]3[ . In recent years,
wavelet theory applied in the motor parameter identification
has been applied ]2[ .
II. LEAST SQUARE IDENTIFICATION OF MOTOR
PARAMETERS
A. Three-level system architecture
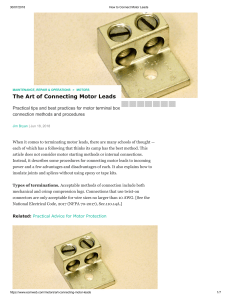
In Figure 1, A, B, C three terminals are connected with
induction motor. U-phase bridge inverter is a wall with
anti-parallel diode 14
(~ )
D
Dof the four source switch
14
(~ )SScomponent. In a real system, switching devices are
IGBT. The midpoint of the two DC capacitor is given in
inverter DC side. 1
Z
D
and 2
Z
D
are the clamping diodes.
Common three-phase bridge arm 12 and the continued flow of
power electronic switching diodes
Fig. 1 T Diagram of three-level NPC inverter
and six clamping diodes, all the same as the pressure tubes.
The two capacitors of the DC parameters are the same, the
voltage is half of the DC voltage[6]. Capacitance for two
capacitors is limited, the midpoint of the capacitor charge and
discharge current will produce the mid-point voltage drift[4 5
7].
29
978-1-4577-0321-8/11/$26.00 ©2011 IEEE
Authorized licensed use limited to: Consortium - Algeria (CERIST). Downloaded on July 09,2020 at 09:54:07 UTC from IEEE Xplore. Restrictions apply.

B. Linear model of induction motor parameters
The core of this method is to detect the rotor stationary
motor parameters, here we use two-phase stationary reference
frame of the motor mathematical model, expressing as
formula (1) - (2).
Voltage equation:
00
00
ss
ss m
ss
ss m
mmrrr
mm rrr
ui
RLp Lp
ui
RLp Lp
ui
Lp L R Lp L
ui
LLp LRLp
αα
ββ
γ
α
γ
α
γβ γβ
ωω
ωω
+
ªº ªº
ªº
«» «»
«»
+
«» «»
«»
=
«» «»
«»
+
«» «»
«»
−−+
«» «»
¬¼
¬¼ ¬¼
(1)
Flux equation:
00
00
00
00
ss
sm
ss
sm
mr
mm
i
LL
i
LL
i
LL
i
LL
αα
ββ
γ
α
γ
α
γβ γβ
ψ
ψ
ψ
ψ
ªº ªº
ªº
«» «»
«»
«» «»
«»
=
«» «»
«»
«» «»
«»
«» «»
¬¼
¬¼ ¬¼
(2)
For the squirrel cage induction motor with rotor measured
voltage is 0. From the mathematical model of induction motor
voltage and flux equations, derived a linear induction motor
model in (2) into (1), we can obtain state equation of the stator
currents
s
iand rotor flux r
ψ
:
1
m
s
rr
li
γ
αα
γ
α
γβ
ψψ
ω
ψ
ττ
=− −
<
(3)
1
m
s
rr
li
γβ β γβ γ
α
ψψ
ω
ψ
ττ
=− +
<
(4)
s
s
ss
r
K
ii K u
αα
γ
α
γβ
α
γψωψα
τ
=− + + +
<
(5)
s
s
ss
r
K
ii K u
β
βγβ γ
α
β
γψωψα
τ
=− + − +
<
(6)
Where
2
2
s
mr
s
s
r
R
lR
lll
γσσ
=+ , m
s
r
l
Kll
σ
=,1
s
s
l
ασ
=. If only the
α
-axis exciting, this time the motor does not turn, in this case
u
β
= 0, i
β
=
β
ψ
=0, we get formula (7) and formulas (8)
1
m
s
rr
li
γ
αα
γ
α
ψψ
ττ
=−
<
(7)
s
s
ss
r
K
ii u
αα
γ
αα
γψα
τ
=− + +
<
(8)
We can get the domain transfer function S, such as formula
(9)
10
2
10
s
s
imsm
i
s
ns n
α
β
+
=++ (9)
Where
1
s
rrs
sr
lR lR
nll
σ
+
=,0
rs
s
r
R
R
nll
σ
=,1
1
s
ml
σ
=,0
r
s
r
R
mll
σ
=, we can
see 1
n,0
n,1
m,0
m the four parameters are closely related to
the motor parameters ,so we must first identify the four
parameters. In order for this least squares transfer function
model parameters identification, which must be turned into a
linear form of variables, we should get their differential from
the stator voltage and current signals, here we use
second-order filter to replace differential. We can select the
filter in the form:
01
11
() ( )( )
Hs s s
ωω
=++
, making
2
01
()()
s
si
zss
α
ωω
=++
,
According to the definition of
z
, we can get
(10)
Here 2
1
s
is a integral part, commonly used in practice to
be replaced by low-pass filter, to avoid saturation points, so
we used )(
1
sH instead. We can get
10 10
101 100 1 0
()
()
()()
() ()
s
s
s
s
iz z
Hs
ns n ms m
iu
Hs Hs
α
αα
ωω ωω
ωω ωω
++
=+
+− + − +
=+
(11)
Using some fractions, we obtained following the linear model:
T
s
iX
α
θ
= (12)
011
01
11 0
1
01
2
2
3011 1
01
4
2
011 1
01
mm
mm
a
a
ann
a
nn
ω
ωω
ω
ωω
θωω
ωω
ωω
ωω
−
ªº
«»
−
«»
«»
−
ªº«»
«» −
«»
«»
==
«»
«» −+ −
«»
«» −
«»
¬¼«»
−+
«»
«»
−
¬¼
ˈ
1
1
0
2
3
1
4
0
1
1
1
1
s
s
s
s
u
s
xu
s
x
Xxu
s
x
u
s
α
α
α
α
ω
ω
ω
ω
ªº
«»
+
«»
«»
ªº«»
«» +
«»
«»
==
«»
«»«»
«» +
¬¼«»
«»
«»
+
«»
¬¼
Where
θ
is the parameter vector which can be identified,
X is measurable signal, these signals can all be measured
through the first order filter, the model has been simplified. In
the calculation , We assumed the stator and rotor leakage
inductance are equal. These parameters and the actual
relationship of the motor parameters:
30
Authorized licensed use limited to: Consortium - Algeria (CERIST). Downloaded on July 09,2020 at 09:54:07 UTC from IEEE Xplore. Restrictions apply.

1 1 034
0100314
112
00112
naa
naa
maa
maa
ωω
ωω ω ω
ωω
=+−−
=−−
=+
=+
(13)
The relationship between the above we can get:
0
0
s
n
Rm
= (14)
1
1
rs
n
R
R
m
=− (15)
1
0
r
rs
R
m
ll m
== (16)
2
1
s
ms
l
ll
m
=−
(17)
C. Three level work vector analysis
In this paper, an improved on the basis of a single-phase
experiments were carried out off-line least squares
identification. Three-level inverter switching state the main
use of PNN and NNN, as in the P-type in the SVPWM vector
and N-type vector can not be switched directly to the
transition through the zero vector.
The following we analysis the role of the state vector
SVPWM switching time. We conducted the analysis from the
above, V
β
= 0. V
α
> 0, the interaction vector for the OOO,
POO, PON, PNN, NNN; V
α
<0, the interaction vector for the
NNN, NNO, NNP, NOP, OOP, OOO.
D. The resolution of the key technology in linear induction
motor model
In the concrete realization of the process, many specific
needs of key technologies need to solve, as following we will
introduce.
1) Stimulus selection: In the parameter identification
process, the selection of stimulus parameters play a decisive
role in whether the convergence.
The continuous transfer function of Identification of the
object is:
01
1
() 1
m
m
n
n
bbs bs
Gs as a s
+++
=++
!
!
(18)
We can see transfer function contain ( 1)mn++
parameters, Therefore, in order to identification
(1)mn++ parameters, the persistent excitation signal shall
include different frequency components at
least: ( 1) / 2jmn≥++ . By simplifying the transfer function,
we can get the requirement of different frequency number
(2 1 1) / 2 2j≥++ =. Therefore, the selected excitation signal
is a linear combination of three different frequency signals.
2) The determination of filter parameters: We
transformed the form above to avoid the differential, but the
introduction of the integrator, which uses second-order
low-pass filter to replace the second integral, in the
transformation of the various models, we get the first-order
low-pass filter with model the equivalent of first-order points.
a) First-order low-pass filter equivalent to the
principle of the integrator
We can draw the low-pass filter cutoff frequency of the
input signal frequency is not the same time, low-pass filter of
the following approximate relationship:
When ec
ωω
, 1
()
c
Gs
ω
≈, when, ec
ωω
, 1
()
Gs
s
≈;
we can get, when 1
e
c
ω
ω
, Low-pass filter can be equivalent
to a pure integrator.
b) First-order low-pass filter parameter selection
Obtained by the above analysis, the larger of c
ω
, the
smaller of 1
c
τω
=. We choose e
c
ω
ω
= 5 or 6 to meet
requirement.
3) Sampling time selection: In order to make the
algorithm on the actual realization of digital controller, the
system must be discretized. We often select under the
experience formula of the sampling frequency; as follows are
the empirical formula of sampling frequency:
a) Selected in accordance with transition time
p
T
(1 / 15 ~ 1 / 5)
s
p
TT= (21)
b) Selected in accordance with main time constant of
the system ls
T
(0.05 ~ 0.1)
s
ls
TT= (22)
c) Selected in accordance with minimum time
constant of the system min
T
min
(1 ~ 2)
s
TT= (23)
Combination of the above calculation, and considering the
actual situation, the final choice of the sampling time is
0.0005s.
III. PARAMETERS IDENTIFICATION OF
INDUCTION MOTOR SIMULATION BASED ON LEAST
SQUARES ALGORITHM
Discussed above analysis, under the Matlab / Smiulink
environment build a simulation model of least squares.
We used in the experiment AC motor nameplate:
YB2-100L1-4, e
P
=2.2KW, 1e
U=380V/660V( /YΔ)
31
Authorized licensed use limited to: Consortium - Algeria (CERIST). Downloaded on July 09,2020 at 09:54:07 UTC from IEEE Xplore. Restrictions apply.

1e
I
=5.05/2.92A( /YΔ), e
n=1410rpm, cos
ϕ
=0.82, Continuous
duty GB series of parameters required m
λ
=2.1.
Calculated by the motor electrical parameters calculation
module, we get the simulation. Here we can see a1, a2, a3, a4
has a good convergence in Figure 3.
Fig.2 Waveform for the intermediate variables
The following simulation experiment we added a
three-level inverter and svpwm module. We conducted
simulation results shown in Figure 3.
Fig.3 Waveform for the parameters of the induction machine
with system
From the figure, we can conclude the effect of
convergence is satisfactory. This result was confirmed by
using the proposed method in practice for the feasibility of
induction motor parameter identification.
ACKNOWLEDGEMENT
The auther would like to thank the reviewers constructive
comment. Thank the National Science Foundation(60974141)
and the Natural Science Foundation of Liaoning Province
(20092007) to support this project.
REFERENCES
[1] Richard F, Chun Tung Chou, Michel HG, A Novel Approach on
Parameter Identification for Inverter Driven Induction Machine[J],
IEEE Trans. on Control Systems Technology, 2000, 8(6): 873-882.
[2] Jian chen. AC motor mathematical model and speed control system
[M]ˈBeijing˖National Defence Industry Pressˈ1989ˈ124-126
[3] Hai jin. Three-phase induction Motor Flux Observer Research on
Parameter Identification [D], Hangzhou˖Zhejiang Universityˈ2006
[4] H du Toit Mouton. Natural Balancing of Three-level
Neutral-Point-Clamped PWM Inverters [J], IEEE Trans.on Industrial
Electronics, 2002, 49(5): 1017-1025.
[5] Fukuda S. Optimal-regulator-based control of NPC boost rectifier for
unity power factor and reduced neutral variations[J] , IEEE Transaction
on Industrial Electronics, 1999, 46(3):527-534
[6] Bin Wu. High-power inverter and AC drive [M]ˈBeijing˖Machinery
Industry Pressˈ2008ˈ133-134
[7] Hong-yuan Jin. Three-level PWM rectifier and the midpoint of the
double-loop control of voltage balance control technique[J]ˈCSEEˈ
2006,26(20)˖64-68
32
Authorized licensed use limited to: Consortium - Algeria (CERIST). Downloaded on July 09,2020 at 09:54:07 UTC from IEEE Xplore. Restrictions apply.
1
/
4
100%