Simulation Hacheur et Régulation MCC - TP Electrotechnique
Telechargé par
farhat thameur

TP Modélisation Simulation et Cde des Convert. Electromécaniques Avril 2017
Kifouche Rezki 2017
1 1
TP3 Simulation d’un hacheur et régulation de vitesse d’un MCC_v02
Objectif du TP :
Simulation d’un hacheur
Simulation d’un hacheur associé à un moteur à courant continu parallèle
Régulation de vitesse d’un MCC parallèle
I. simulation du hacheur débitant sur une charge RL :
Le hacheur est convertisseur DC/DC utilisé pour varier la tension moyenne de sortie. Il est associé
au moteur à courant contenu pour la commande. La commande MLI est la plus utilisée pour
commander le hacheur en tension. L’un des critères principal lors de l’utilisation des hacheurs pour
la commande du moteur à courant continu, c’est le choix de la période T de fonctionnement, qui
devrait permettre un fonctionnement sans que le courant s’annule dans l’enroulement du moteur.
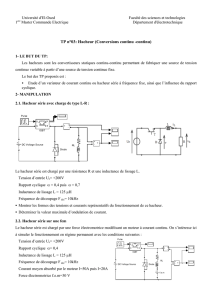
La figure fig.1 représente un hacheur à un quadrant débitant sur une charge RL. Pour les montages
hacheurs, on retrouve des montages à deux et à quatre quadrants aussi.
Monter dans simulink ce schéma bloc et simuler pour chacune des deux charges RL :
a. La puissance réactive de la charge RL est : Q=100var
b. La puissance réactive de la charge RL est : Q= 1000var.
Visualiser pour chacune des valeurs de Q :
Les impulsions de commande du hacheur
La tension aux bornes de la charge RL
L’évolution du courant dans la charge
Constater l’état de la conduction d’abord discontinue puis continue du hacheur.
Refaire les mêmes simulations pour les deux mêmes valeurs de Q en cherchant la période des
impulsions qui vont permettre d’obtenir, à chaque fois, une conduction continue.
Fig.1 Modèle de simulation d’un hacheur à un quadrant débitant sur une charge RL

TP Modélisation Simulation et Cde des Convert. Electromécaniques Avril 2017
Kifouche Rezki 2017
2 2
II. Simulation d’un hacheur alimentant un MCC :
Le rôle du hacheur est de délivrer une tension variable. On commence par simuler le générateur
d’impulsion pour la commande du hacheur. Puis on associe ce générateur au hacheur déjà simulé à
la partie I en remplaçant la charge RL par le moteur à courant continu récupéré de la bibliothèque
SimPowerSyst.
II.1 On monte le schéma bloc, représenté par la figure fig.2, sous Simulink
Simuler pour deux valeurs de la constante :
a. Constante = 4
b. Constante = 8
Visualiser l’évolution de :
Du signal dent de scie
La valeur de la constante
Les impulsions de sortie
Constater la variation des largeurs des impulsions.
II.2 On associe le générateur des impulsions au hacheur et au moteur et on simule l’ensemble. Voir
figure fig.3.
Le hacheur est commandé par la technique MLI, qui permet de changer la tension d’alimentation du
moteur, puis obtenir la variation de la vitesse du moteur.
Fig.2 Générateur des impulsions de commande MLI

TP Modélisation Simulation et Cde des Convert. Electromécaniques Avril 2017
Kifouche Rezki 2017
3 3
Simuler le système pour deux valeurs de la référence, représentée par une constante, à l’entrée du
générateur d’impulsions :
a. De 0 à 5s ref = 4
b. De 5 à 10s ref = 8
Visualiser l’évolution de :
Du signal dent de scie et de la référence
Les impulsions de gâchette
La tension aux bornes de l’induit du moteur
Le courant dans les enroulements du moteur
La vitesse de rotation du moteur
III. Simulation de la variation de vitesse avec et sans régulation (BO et BF):
Reprendre la modèle du MCC, et simuler la variation de la vitesse en fonction de la variation de la
tension et du couple charge, sans régulation (Fig.4) puis avec régulation avec un régulateur
proportionnel voir (Fig.5).
Fig.3 Modèle de simulation d’un hacheur à un quadrant alimentant un MCC
(SimPowerSystems)

TP Modélisation Simulation et Cde des Convert. Electromécaniques Avril 2017
Kifouche Rezki 2017
4 4
III.1 On commence par simuler le fonctionnement du moteur sans régulation :
On simule le moteur pour le suivant :
a. La tension d’alimentation commence à 100V puis à t= 4s la tension devient 220V.
b. Pour le couple résistant, on choisi d’appliquer un couple Cr1=40nm à t=3s et un autres
identique Cr2=40nm mais à t=7s.
Visualiser l’évolution de :
La tension d’alimentation
Le couple résistant
La vitesse de rotation du moteur
III.2 On simuler le fonctionnement du moteur avec régulation :
On insère un régulateur proportionnel le schéma bloc du moteur, représentée sur la figure par le
gain3, on montant le schéma comme suit :
Fig.4 Simulation d’un MCC en boucle ouverte avec variation de la tension
d’alimentation et du couple résistant
Fig.5 Simulation d’un MCC en boucle fermée avec variation du couple résistant,
avec un régulateur en P

TP Modélisation Simulation et Cde des Convert. Electromécaniques Avril 2017
Kifouche Rezki 2017
5 5
Le modèle du hacheur est intégré dans le schéma bloc, il est représenter par un gain K, dans notre
cas K=1, il n’apparait pas dans le schéma bloc, sinon, il est monté juste après le régulateur. Après le
comparateur, l’erreur obtenue est une entrée pour le régulateur proportionnel.
A l’entrée du hacheur, on a un signal appelé référence de vitesse, qu’on corrige pour le ramener à la
hauteur la vitesse mesurée, pour effectuer une comparaison et obtenir l’erreur qui est l’entrée du
régulateur.
On simule le système pour différentes valeur k, gain du régulateur, pour une tension et un couple
résistant qui évoluent comme suit :
a. La tension d’alimentation commence à 100V puis à t= 4s la tension devient 220V.
b. Pour le couple résistant, on choisi d’appliquer un couple Cr1=40nm à t=3s et un autres
identique Cr2=40nm mais à t=7s.
On prend :
1. K= 10
2. K= 20
3. K= 40
Visualiser l’évolution de :
La tension d’alimentation
Le couple résistant
La vitesse de rotation du moteur
On constate l’influence de la régulation sur l’évolution de la vitesse du moteur, puis l’erreur de
vitesse en fonction de la valeur de K.
IV. Préparation du compte rendu
Présenter les objectifs de la simulation.
Afficher les courbes de simulation obtenues
Interpréter les résultats obtenus en expliquant en détail, l’évolution des courbes.
Donner une conclusion objective du travail.
1
/
5
100%