1
ETUDE ET COMMANDE DE GÉNÉRATRICES ASYNCHRONES
POUR L' UTILISATION DE L' ÉNERGIE ÉOLIENNE
-Machine asynchrone à cage autonome
-Machine asynchrone à double alimentation reliée au réseau
Directeur de Thèse : René LE DOEUFF
Encadrant : Mohamed MACHMOUM

2
PLAN DE L’ETUDE
1ère PARTIE : Généralités sur les systèmes éoliens
Présentation du système éolien global
Problèmes posés par une chaîne de conversion éolienne
Solutions électrotechniques
2ème PARTIE : Machine asynchrone auto-excitée autonome
Performances en régime équilibré et déséquilibré
Limites de fonctionnement
3ème PARTIE : Simulateur analogie de turbine éolienne
Modélisation du vent et de la turbine
Commande d’une MCC
4ème PARTIE : Etude et commande de la MADA en génératrice
Topologie des machines à double alimentation
Modélisation de la machine en vue de la commande
Synthèse des régulateurs
Résultats et association avec le simulateur de turbine

3
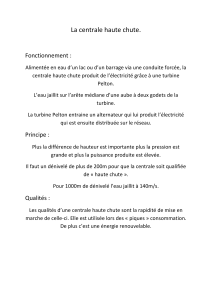
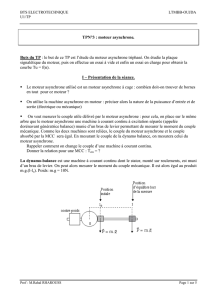
Energie éolienne, qualité et développement :
Puissance installée en GW en Europe fin
2002 :
Programme EOLE 2005, lancé
par l’ADEME en 1996 :
Objectif 0,5 GW en France d’ici
2005
12
4,15
2,9
0,15
0
2
4
6
8
10
12
Allemagne Espagne Danemark France
1ère PARTIE : Généralités sur les systèmes éoliens
Energie propre sans rejet atmosphérique
Géographiquement diffuse
Source d’énergie (vent) généralement plus importante en hiver
Captage et conversion de l’énergie complexe
Matériaux coûteux
Source d’énergie (vent) aléatoire

4
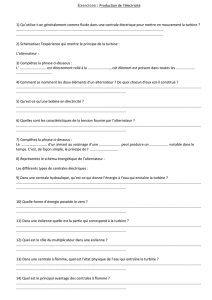
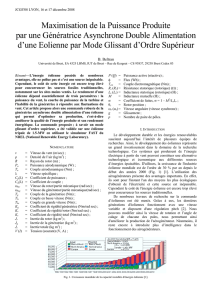
Conversion de l’énergie
23 2
11
1( ) ;
2
mp R
P C R V avec KV
Puissance disponible sur l’arbre de la génératrice :
0 200 400 600 800 1000 1200 1400 1600 1800 2000
0
1000
2000
3000
4000
5000
6000
7000
8000
9000 14 m/s
13 m/s
11 m/s
12 m/s
8 m/s
9 m/s
10 m/s
Puissance mécanique (Watts)
Vitesse de rotation du générateur (tr/min)
0 0.1 0.2 0.3 0.4 0.5 0.6
0.5
0.51
0.52
0.53
0.54
0.55
0.56
0.57
0.58
0.59
0.6
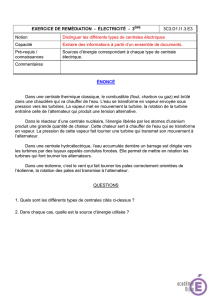
p
C
Cp
Exemple d’évolution du
coefficient de puissance
Vitesse fixe
Vitesse variable
1ère PARTIE : Généralités sur les systèmes éoliens

5
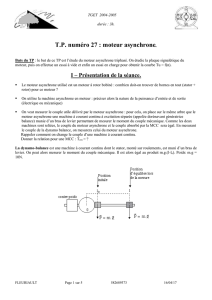
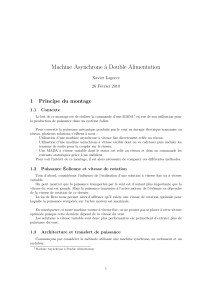
Systèmes de régulation de vitesse et
production optimale d’énergie
Système "stall"
res
V
res
V
Système " pitch"
Section de
pale
V
Sens de
déplacement
Fonctionnement de
l'éolienne à Cpmax. quelle
que soit la vitesse du vent :
Cp=Cpmax pour
=
opt
. ( )
opt
opt v zoneII
R
1ère PARTIE : Généralités sur les systèmes éoliens
III III
opt
max
min Vvent
Vmax
Vmin
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
1
/
51
100%