1
Résumé
—Cetarticleétudielesstructuresdecommandedela
Machine Asynchrone à Double Alimentation (MADA) qui
permettentdecontrôlerindépendammentlespuissancesactiveet
réactivestatoriqueslorsquelaMADAestconn ectéeauréseauou
surunechargeisolée.Danscetarticle,ondétaillela modélisa tion
de la MADA nécessaire pour appliquer la commande
indépendan te despu issan cesdan slesd eu x cas.Pu is, àpa rtir de
cette modélisation, on dégage les stratégies de commande. Ces
dernières sontsimuléesenutilisantMATLAB
®
/Simulink
®
.Dans
la pa rtie expér imentale, on a implémenté sur un e carte DSP un
algorithme qui p ermet d e fixer la fréq uence des tensions
sta toriques à 50Hz quelque soit la vitesse d’entraînement de la
MADA. Lesrésultatsexpér imentauxobtenussontainsimontrés.
MotsClés
—C ommandeindép endantedespuissancesa ctiveet
réactive,ÉnergieÉolienne,eZdspF2812,MADA,modeconnecté
au réseau,modeîloté.
I. INTRODUCTION
armi les énergies renouvelables non conventionnelles
connues actuellement, l’énergie éolienne est celle la plus
compétitiveetquialetauxdecroissanceleplusélevé[1].
Différentes configurations sont proposées afin de convertir
cetteénergieenélectricité.Parmicesdernière,celleàbasede
la MADA avec stator lié directement au réseau et rotor
alimenté à travers deux convertisseurs MLI est la plus
int ressante du point de vue co t et performance ([2])
car, dans cette configuration, la MADA peut travailler à
vitessevariabledansune largeplagedevariationdevitesse ;
de plus le convertisseur côté rotor n’est dimensionné qu’au
tiersdelapuissancenominaledelamachine.
A.Khirennas,Laboratoired’ElectroniquedePuissance,U.E.R.
Electrotechnique,E.M.P,Alger,Algérie,
e_mail:khaaa24@yahoo.fr
E.M. Berkouk, Laboratoire de commande des Processus, ENP ElHarrach,
Alger(Algérie)
e_mail:emberkouk@yahoo.fr
T. Ghennam, Laboratoire d’Electronique de Puissance, U.E.R.
Electrotechnique,E.M.P,Alger,Algérie,
e_mail:t_ghennam@yahoo.fr
T. Mesbahi, Laboratoire d’Electronique de Puissance, U.E.R.
Electrotechnique,E.M.P,Alger,Algérie,
e_mail:nadjib8507@yahoo.fr
II. MODELISATIONDELAMADAENVUEDELACOMMANDE
INDEPENDANTEDESPUISSANCES
A. Principe:
LacommandevectorielledelaMADAestsouventassociéeà
la commande indépendante de ses puissances statoriques,
rotoriques ou celles du réseau [3]. Dans notre étude, ce sont
lespuissancesstatoriquesquiserontcommandées.
Pourcefaire,l’approcheconsisteàétablirunmodèlequimet
enévidencelapossibilitéd'agirsur lessignauxrotoriquesen
vue de contrôler, et d’une façon découplée, l'échange des
puissancesactiveetréactiveentrelestatordelamachineetle
réseau (ou lacharge)sur lequelelledébite. Il y adeux cas à
distinguer:
lecasoùlaMADAestconnectéesurunechargeisolée.La
stratégiedecommandedoitassurer la régulation delavaleur
efficaceetdelafréquencedestensionsstatoriquesquedébite
laMADAsurlacharge;
et le cas où elle est connectée sur un réseau de puissance
supposée infinie donc la valeur efficace et la fréquence des
tensionsstatoriquessontdictéesparleréseau;on s’intéresse
plutôt au contrôle des puissances active et réactive débitées
parlaMADAsurleréseau.
B. Orientationdurepèred,q:
Pouraboutiràunmodèlepermettantlacommandedécouplée
des puissances, on choisit pour les deux cas d’orienter le
repèredePark(
d,q)
detellesortequel’axe
d
soitalignésurle
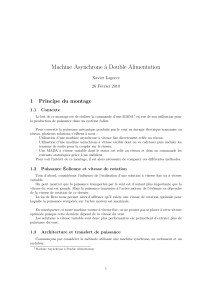
fluxstatoriqueΦ s (Fig.1).
Fig.1. Orientationdurepèrediphasé
d,q
Cequi donne :
0
d s s
q s
F = F
ì
ï
í F =
ï
î
(1)
AlimentationetCommanded’uneMachine
AsynchroneàDoubleAlimentation(MADA)en
vued’uneApplicationpourlaConversionde
l’EnergieEolienne.
A.Khirennas,E.M.Berkouk,T. Ghennam,T.Mesbahi
P

2
La tension d’une phase statorique
i
est donnée par:
si
si s si
d
v R i dt
F
= +(2)
Si l’on néglige
s
R
, hypothèse réaliste pour les machines de
fortepuissance,onpeutécrire:
si
si
d
v dt
F
»(3)
avec
si
F:lefluxtotalisésouslaphase
i
.
III. LACOMMANDEINDEPENDANTEDESPUISSANCESACTIVE
ETREACTIVESTATORIQUESDELAMADADANSLEMODE
CONNECTEAURESEAU
A. Modélisation:
SilaMADAestconnectéesurunréseauélectriquequel’on
suppose stable et ayant pour tension simple
Vs
, cela
conduit à un flux statorique constant et le modèle de la
MADAsesimplifiedonccommesuit [4]:
. .
. .
dr
dr r dr r s r qr
qr m s
qr r qr r s r dr
s
di
v R i L g L i
dt
di L V
v R i L g L i g
dt L
s w s
s w s
ì = + -
ï
ï
í
ï = + + +
ï
î
(4)
Avec
s
:lecoefficientdedispersiondelamachine.
Quant aux puissances statoriques, elles sont exprimées
commesuit:
2
3( )
2
3( )
2
m
s s qr
s
sm
s s dr
s s s
L
P V i
L
VL
Q V i
L L w
ì = -
ï
ï
í
ï = - +
ï
î
(5)
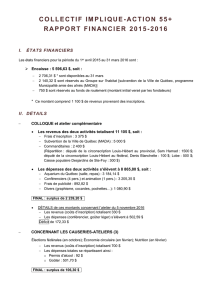
D’où le modèle interne de la MADA représenté par le
schémablocsuivant(Fig.2.):
Fig. 2.ModèleinternedelaMADA
B. Structuredelacommande :
À la base du modèle établi et afin de commander les
puissancesstatoriques,onpeututiliserunecommandedirecte
avecbouclesdecourant.Cettestructureconsiste,enplusdes
bouclesderégulationdespuissances,àdesbouclesinternesde
régulationdecourant(Fig.3.).
Fig.3.Commandedirecteavecbouclesdecourant
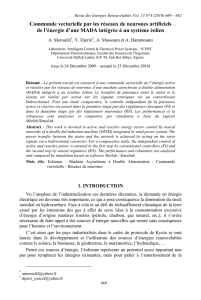
C. Simulationnumérique:
La structure décrite cidessus est simulée en choisissant
d’alimenterlerotorparunonduleuràdeuxniveauxalimentéà
sontourparunesourcedetensioncontinuesupposéeparfaite.
Lavitessepasseàl’instantt=0.4sdelavitessenominale(1410
tr/mn)àlavitesse1000tr/mn.
Onappliqueleséchelonsdespuissancessuivants:
Ps_refpasseàl’instantt=0.5sde 1500Wà+1500W
Qs_refpasseàl’instantt=0.8sde500VArà+500VAr.
Lesrésultatsobtenussontmontréscidessous:
0 0.1 0.2 0.3 0 .4 0.5 0.6 0.7 0.8 0.9 1
2000
1000
0
1000
2000
3000
temps(s)
P s
r e f e t P s (W )
Ps ref
Ps
(a)Lapuissanceactive
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
1000
500
0
500
1000
temps(s)
Q s
r e f e t Q s ( V A R )
Qs ref
Qs
(b)Lapuissanceréactive
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
100
50
0
50
100
150
temps(s)
T e n s io n s ro to r iq u e s d e r é fé r e n c e ( V o lt s )
vra ref
vrb ref
vrc ref
(c)Lestensionsrotoriques
PsrefetPs(W)
QsrefetQs(Var)

3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
15
10
5
0
5
10
15
20
temps(s)
C o u r a n t s r o t o r iq u e s ( A )
ira
irb
irc
(d)Lescourantsrotoriques
Fig.4.Résultatsdesimulationdelastructuredecommande
directeavecbouclesdecourant
D. Interprétationdesrésultats:
Les résultats obtenus montrent que les puissances active et
réactive suivent bien leurs références imposées. De plus on
peut constater que la puissance active est directement
commander par
qr
v
et celle réactive par
dr
v
ce qui signifie
que le pilotage de la MADA par son rotor permet de
commanderindépendammentlespuissancesàsonstator(Fig.
2.).Deplus,laMADApeutgénéreraussibiendelapuissance
réactivequedelapuissanceactive.
IV. LACOMMANDEINDEPENDANTEDESPUISSANCESACTIVE
ETREACTIVESTATORIQUESDELAMADADANS LEMODEILOTE
A. Modélisation:
Danscemode,laMADAdoitassurerensortiedestensionsà
fréquenceetamplitudefixesmêmeenvariantlachargesurla
quelleelledébiteetquelquesoitlavitesseaveclaquelleelle
estentraînée.
PourcefaireonétablitunmodèlediphasédelaMADApour
lequellestensionsstatoriquessontdesvecteursen sortieet
pourlequellerepère
(d,q)
estorientéde lamêmefaçonque
pourlepremiercas c.à.d. enorientant l’axe
d
suivantle flux
statorique.On aboutit aumodèlereprésentéparleséquations
liantlesfluxrotoriques aveclestensionsrotoriquessuivantes:
rd
r
rq
r
1.
1.
dr
dr d
qr
qr q
d v E
dt T
d v E
dt T
F
ì = - F + +
ï
ï
í F
ï = - F + +
ï
î
(6)
Avec:
( )
( )
m
d ds s qr
r
m
q qs s dr
r
L
E i
T
L
E i
T
w w
w w
ì = + - F
ï
ï
í
ï = - - F
ï
î
(7)
etpar leséquations liantles fluxrotoriquesaveclestensions
statoriquessuivantes:
( )
( )
m
d s s qr d
r
m
q s s d r q
r
L
v A
L
L
v A
L
w
w
ì = - F +
ï
ï
í
ï = + F +
ï
î
(8)
Avec:
( )
( )
sr
d ds s qs
m s
s
r
q qs s ds
m s
RL
A i L i
L
RL
A i L i
L
s
w
s
w
ì = - +
ï
ï
í
ï = +
ï
î
(9)
D’où le modèle interne globale de la MADA représenté
commesuit:
Fig. 5. ModèleinternedelaMADAdanslemodeiloté
B. Structuredecommande :
Apartirdecemodèle,lastratégiedecommandeconsisteàdes
bouclesinternesderégulationdesfluxrotoriquesdirecteten
quadrature, et une boucleexterne de régulation de la tension
statorique[5](Fig.6.).
Fig. 6. Structuredecommandedela MADAdanslemode
iloté
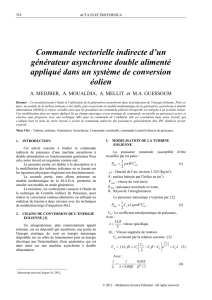
C. Simulationnumérique:
La structure de commande décrite cidessus est simulée en
imposantl’alluredevitessedelaMADAsuivante:
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
temps(s)
N/N s
Fig.7.Alluredelavitessed’entraînementdelaMADA
Onimposeunevaleurefficacedelatension statoriquesimple
de220voltsetunefréquencede50Hz.LerotordelaMADA
Courantsrotoriques(A)

4
est alimenté, comme pour le 1
er cas, par un onduleur à 2
niveaux.
LaMADAdémarreàvide(sanscharge)puisàl’instantt=0.1s
onluiassocieunechargetriphaséepurementrésistivede1KW
c.à.d.,avec 220
seff
V Volts
=,unerésistanceR=145.2Ωpar
phase.Lesrésultatsobtenussontmontréscidessous:
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
100
50
0
50
100
150
200
250
300
350
temps(s)
v s q e t v s d (V o lts )
(a)Lescomposantesdirecte
sd
v
etenquadrature
sq
v
delatensionstatorique
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
400
300
200
100
0
100
200
300
400
temps(s)
T e n s io n s s t a t o r i q u e s ( V o lts )
(b)Lestensionsstatoriques
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
60
40
20
0
20
40
60
80
temps(s)
T e n s io n r o t o r i q u e s d e r é f é r e n c e ( V o l t s )
vraref
vrbref
vrcref
(c)Lestensionsrotoriques
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
10
5
0
5
10
15
temps (s )
C o u r a n t s r o t o r i q u e s ( A )
ira
irb
irc
(d)Lescourants rotoriques
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
3
2
1
0
1
2
3
4
temp s(s)
C o u r a n t s s t a t o r i q u e s ( A )
isa
isb
isc
(e)Lescourantsstatoriques
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
1500
1000
500
0
500
temps(s)
P s (W )
(f)Lapuissanceactivestatorique
Fig.8. Résultatsdesimulationdelastructuredecommandede
laMADAdanslemodeiloté
D. Interprétationdesrésultats:
Onremarquel’aptitudedelarégulationàgarderlatension
statoriqueàunevaleurefficacede220Voltsetunefréquence
de 50Hz même lors de la variation de la charge ou de la
vitessed’entraînement.
L’application de la charge se traduit par une brusque
variationdelatensionstatoriquepuiscettedernièrerevientà
savaleurderéférenceimposée.
L’amplitude des tensions rotoriques diminue avec la
diminutiondelavaleurabsolueduglissementselonlarelation
. .
Vr m g Vs
=avec m: rapport de transformation de la
machine
La fréquence des tensions et des courants rotoriques
changeselonlarelation .
fr g fs
=.
L’application de la charge est accompagnée par une
augmentation de l’amplitude des courants statoriques et, par
conséquence,ceuxrotoriques.
L’amplitude des courants rotoriques ne dépend pas de la
vitesse d’entraînement de la machine mais seulement de la
charge.
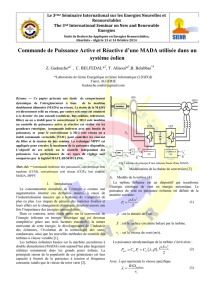
V. LAREALISATIONEXPERIMENTALE
Le banc d’essai réalisé consiste en une chaîne expérimentale
deconversiondel’énergieéolienne.L’émulateurdelaturbine
éolienne est réalisé puis, sur cet émulateur est associée une
machineasynchroneàrotorbobiné(MADA).
En utilisant la carte d’évaluation eZdsp F2812 ([6], [7]), on
implémenteunalgorithmequipermetdefixerlafréquencedes
tensionsaustatordelaMADAà50Hzquelquesoitsavitesse
d’entraînement.
0
g
f0
g
p
0
g
=
0
g
f0
g
p
0
g
=
sd
v
sq
v

5
En effet, l’algorithme est établi sous forme d’un modèle
Simulink; La compilation de ce modèle génère le code C
correspondant .Cedernierestensuitechargéetexécutésurla
carteDSP.
La carte DSP délivre les signaux PWM qu’on applique sur
l’onduleurà2niveauxalimentantlerotordelaMADA.Cette
dernière est entrainée par l’émulateur à une vitesse variable
selonunprofildeventdonné[8].Onrelèveainsilestensions
austatordelaMADAbranchéesurunechargeisolée.
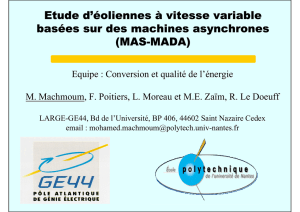
Fig. 9.Lestensionsstatoriquesetlavitessederotationdela
MADAentrainéeparl’émulateur
(a)à100tr/mn (b)à200tr/mn
(c)à500tr/mn (d)à750tr/mn
Fig.10. LestensionsstatoriquesdelaMADApourdifférentes
vitessesderotationdel’ensemble«MADA–Emulateur».
Les alluresdes tensionsstatoriques obtenues indiquentque
lafréquencedecesdernièresestégaleà50Hzquelquesoitla
vitesse d’entraînement; ce quipermet devalider l’algorithme
utiliséetlemodèleSimulinkétabli.
On remarque que l’amplitude des tensions statoriques
augmente avec l’augmentation de la vitessede rotation et vis
versa.
VI. CONCLUSION
Dans cet article, on a étudié les structures de commande
permettantdecontrôlerindépendammentlespuissancesactive
et réactive statoriques de la MADA dans le cas où elle est
connectéeauréseauousurunechargeisolée.
Lesrésultatsdesimulationobtenuspermettentdevaliderles
stratégies de commande étudiées et mettent en évidence la
possibilitédepiloterlaMADAparsonrotorafindecontrôler
lespuissancesàsonstator.
Les résultats de l’implémentation de l’algorithme
permettant de fixer la fréquence des tensions au stator de la
MADAnous ontpermisdevaliderlemodèleSimulinkétabli.
REFERENCES
[1] http://www.worldenergy.org
[2] S.ELAIMANI,«Modélisationdedifférentestechnologiesd’éoliennes
intégréesdansunréseaudemoyennetension.»,Thèsededoctorat,Ecole
Centrale de Lille et Université de sciences et technologies de Lille,
Decembre2004.
[3] P. E. VIDAL, « Commande nonlinéaire d’une machine asynchrone à
doublealimentation»,Thèsedoctorat,L’InstitutNationalPolytechnique
deToulouse,Décembre2004.
[4] A. BOYETTE, « Contrôlecommande d’un générateur asynchrone à
double alimentation avec système de stockage pour la production
éolienne », Thèse de doctorat, Université Henri Poincaré, Nancy I,
Décembre2006.
[5] F. KHATOUNIAN' et
al
, « Control of a Doubly Fed Induction
Generator for Aircraft Application »,
Records of IEEE IECON 2003
,
Roanoke,USA,2003,pp.207112016.
[6] TheMathWorks, Inc., «Link forCodeComposer Studio™ 3, User’s
Guide»,2007.
[7] TheMathWorks,Inc.,« EmbeddedTargetfortheTITMS320C2000™
DSPPlatformForUsewithSimulink,User’sGuide»,2003.
[8] F. AKEL,« Etudeetréalisationd’unémulateurdeturbineéolienne »,
MémoiredeMagister,EcoleMilitairePolytechnique,Mars2009.
1
/
5
100%