Câblage industriel : Initiation aux capteurs et à leur utilisation

Electrotechnique-fr.com Initiation au câblage industriel
Technologie
Les capteurs Page
1/17
1. Les capteurs : Le traitement de l’information.
Pour exploiter correctement un système technique, électrique ou pneumatique, qui peut être
éventuellement automatisé, il est nécessaire suivant la nature de ce système :
De mesurer les variations de certaines grandeurs physiques.
Exemples
La vitesse du vent pour un store commandé
automatiquement.
La pression d’air dans le réseau d’alimentation d’un
automatisme pneumatique.
La température d’un four de traitement thermique.
De contrôler l’état physique de certains de ses constituants.
Exemples
La position levée d’une barrière de parking.
La présence d’une pièce sur un convoyeur.
La position fermée de la porte de chargement d’un four
industriel.
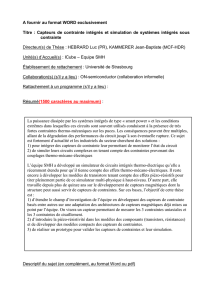
Le système technique doit donc traduire la variation de grandeur physique ou le
changement d’état en un signal exploitable par la partie commande du système
technique.
( Ex : Température du four).
Ce signal exploitable est une image informationnelle de la variation de grandeur ou du
changement d’état.
http://www.electrotechnique-fr.com

Electrotechnique-fr.com
Initiation au câblage industriel
Technologie
Les capteurs Page
2/17
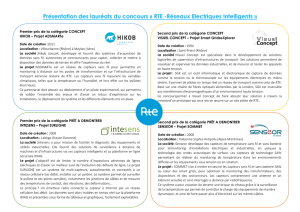
2. Les différents signaux transmis
http://www.electrotechnique-fr.com

Electrotechnique-fr.com
Initiation au câblage industriel
Technologie
Les capteurs Page
3/17
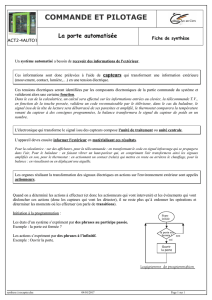
3. Les détecteurs de positions Tout-ou-Rien
3.1. Interrupteur de position avec contact
De nombreuses versions existent, elles sont fonction des problèmes posés par
leur utilisation (encombrement, nature des mouvements à prendre en compte), ainsi que de leur
exploitation (sévérité de l’environnement, atmosphère corrosive…).
Une action mécanique directe permet d’ouvrir ou de fermer un ou plusieurs
contacts.
L’objet à détecter entre en contact avec le dispositif d’attaque, le mouvement engendré
provoque le basculement du contact électrique.
http://www.electrotechnique-fr.com

Electrotechnique-fr.com
Initiation au câblage industriel
Technologie
Les capteurs Page
4/17
a)
Caractéristiques électriques
Elles définissent :
La nature du circuit : Alternatif ou continu.
Les valeurs maximales de la tension et du courant qui
peuvent être coupées.
La configuration des contacts.
b)
Caractéristiques mécaniques
Elles définissent
L’endurance mécanique ou durée de vie estimée par le
nombre probable de manœuvres.
Force nécessaire pour déplacer l’organe de commande.
Amplitude de la course du mécanisme transmetteur.
http://www.electrotechnique-fr.com

Electrotechnique-fr.com
Initiation au câblage industriel
Technologie
Les capteurs Page
5/17
c)
Démarche de choix d’un interrupteur de position à contact.
Exemples :
http://www.electrotechnique-fr.com
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%