Partie III
Les Actions Mécaniques
L'équilibre ou le mouvement s'un solide ou d'un ensemble de solides
résulte des actions mécaniques exercées. Ces actions seront d'abord
considérées sans se préoccuper des phénomènes physiques qui leur
donnent naissance et seront alors classées en force, couple et action
quelconque. Les actions de gravitation et de pesanteur seront étudiées
dans un chapitre particulier. Un chapitre sera consacré aux actions de
liaison, dont le concept est à la base de la conception technologique
des systèmes mécaniques. L'étude de quelques problèmes d'équilibre
statique des solides permettra de comprendre la structuration des
actions mécaniques exercées sur un solide ou un ensemble de solides.


CHAPITRE 11
Généralités sur les Actions
Mécaniques
11.1 CONCEPTS RELATIFS AUX ACTIONS
MÉCANIQUES
11.1.1 Notion d'action mécanique
Les phénomènes mécaniques résultent d'actions mécaniques, dont nous avons
une notion usuelle :
— un objet, abandonné à lui-même, tombe : la Terre attire l'objet ;
— le même objet, posé sur une table, ne tombe plus : la table exerce sur l'objet
une action qui l'empêche de tomber ;
— un enfant qui pétrit de la pâte à modeler exerce une action qui déforme la
pâte ;
— le cycliste exerce sur les pédales une action qui produit le déplacement du
vélo ;
— le frein exerce une action qui s'oppose à ce déplacement ;
— etc.
Ainsi, d'une manière générale, une action mécanique est un processus qui
maintient un équilibre, provoque une déformation, produit un mouvement ou
s'oppose à un mouvement.
11.1.2 Représentation d'une action mécanique
Si la notion d'action mécanique est usuelle, elle n'est pas en fait directement
accessible par la mesure. Nous n'en avons une connaissance que par ses
conséquences : présence ou absence d'équilibre, mesure de déplacements, mesure
de déformations, établissement de lois des mouvements, etc. Ainsi, afin de

Chapitre 11 Généralités sur les actions mécaniques 156
traduire par des équations les divers phénomènes mécaniques, on est amené à
énoncer l'axiome suivant :
Toute action mécanique s'exerçant sur un ensemble matériel peut être repré-
sentée par un torseur associé à cet ensemble.
Nous entendons par ensemble matériel soit un solide, soit un ensemble de solides.
11.1.3 Classification des actions mécaniques
À chaque type de torseur correspond un type d'action mécanique dont les
propriétés sont des conséquences immédiates des résultats établis au chapitre 5.
11.1.3.1 Force
On dit qu'une action mécanique exercée est une force, si et seulement si le
torseur représentant l'action mécanique est un glisseur.
Il résulte des propriétés établies au paragraphe 5.2.1, qu'une force est
caractérisée par :
— la résultante du glisseur associé à la force, généralement appelée par
contraction de langage : la résultante de la force (la norme de la résultante de la
force appelée intensité de la force s'exprime en newtons : N) ;
— l'axe de moments nuls du glisseur (déterminé par un seul point lorsque l'on
connaît la résultante), appelé support de la force ou ligne d'action.
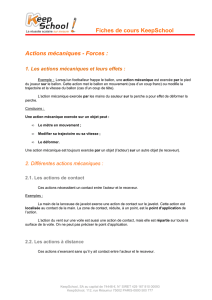
Si l'action mécanique exercée sur l'ensemble (D) est une force, nous pourrons
la représenter symboliquement en faisant figurer le support (
∆
) de la force et un
bipoint (A, B) dont l'image dans \3 est la résultante de la force :
R
J
G (figure 11.1a).
Si nous sommes dans le cas étudié au paragraphe 5.3.3 du chapitre 5, la force
possède un centre de mesure H défini par (5.69) ou (5.72) ; et nous prendrons
pour point A le centre de mesure (figure 11.1b).
Enfin, notons qu'une force tend à déplacer l'ensemble sur lequel elle s'exerce,
suivant la direction définie par la résultante, donc parallèlement au support de la
force.
11.1.3.2 Couple
On dit qu'une action mécanique est un couple (action-couple), si et seulement
si le torseur représentant cette action est un torseur-couple.
Il résulte des propriétés établies au paragraphe 5.2.2 qu'un couple est carac-
térisé par son vecteur-moment, indépendant du point considéré, et dont l'intensité
s'exprime en N m. Ce vecteur-moment est parfois appelé couple. Notons toutefois
qu'il y a lieu de distinguer l'action-couple, du torseur-couple et de son vecteur-
moment.
D'autre part, il résulte du paragraphe 5.2.2 qu'un couple est équivalent à un
couple de deux forces de résultantes opposées, donc de supports parallèles. Il

11.1 Concepts relatifs aux actions mécaniques 157
FIGURE 11.1. Représentation symbolique d'une force.
existe une infinité de couples de forces équivalents à un couple ; ces couples sont
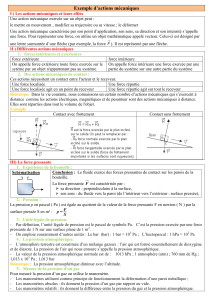
obtenus conformément aux résultats du paragraphe 5.2.2.3. Un couple tend à faire
tourner l'ensemble sur lequel il s'exerce, dans le sens direct autour de la direction
définie par le vecteur-moment du couple (figure 11.2).
11.1.3.3 Action mécanique quelconque
On dit qu'une action mécanique est quelconque, si et seulement si le torseur
représentant cette action est un torseur quelconque.
Suivant les résultats établis au paragraphe 5.2.3, une action mécanique
quelconque peut être décrite comme étant la superposition d'une force et d'un
couple. L'action mécanique est alors réduite à une force et un couple. Il existe une
infinité d'ensembles force-couple équivalents à une action mécanique quelconque
(paragraphe 5.2.3.2).
FIGURE 11.2. L'action-couple tend à faire tourner l'ensemble (D).
A
(∆)
B
(D)
(∆): support de la force
AB R=
JJJGJG
: résultante de la force
(∆): support de la force
HB R
=
J
JJG JG : résultante de la force
H: centre de mesure
(a)
H
(∆)
B
(D) (b)
A
B
(D)
AB =
JJJGJJG
M: moment du couple
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
1
/
72
100%