Calcul d'erreur et propagation des incertitudes en physique
Telechargé par
Messaoui 1 Imed

TravauxPratiquesdePhysique vers.septembre2014
Calculd’erreur(ouPropagationdesincertitudes)
1) Introduction
Lemot"erreur"seréfèreàquelquechosedejusteoudevrai.Onparled’erreursurune
mesurephysiquelorsqu’onpeutlacompareràunevaleurderéférencequ’onpeut
considérercomme"vraie"(parex:mesuredelavitessedelalumière,delatempératuredu
zéroabsolu).
Généralement,pourlesmesureseffectuéesaulaboratoire,onnepossèdepasdevaleurde
référenceetonneconnaîtpaslavaleurexactedelagrandeurmesurée(parex.vitessed’un
projectile(tir)).Onparlealorsd’incertitude.
LerésultatYd’unemesuredépendgénéralementdeplusieursgrandeursmesuréesx1,x2,….
Onparlealorsd’unegrandeurcomposée.Chaquegrandeurmesuréeaunecertaine
incertitudex1,x2,…etcesdernièresvontsecombinerpourproduirel’incertitudetotale
YsurlerésultatY.Lafaçondontl’incertitudedechaqueparamètreindividuelcontribueà
l’incertitudetotaleestdécriteparlapropagationdesincertitudes.
Lapropagationdesincertitudesestdoncletermecorrectpourl’expressionimproprement
maiscourammentutiliséedecalculd’erreur.
2) Mesure
Parmesureonentendsoitledénombrementd'unensembled'objetsoud'évènements(par
ex.lecomptagedeprocessusdedésintégrationradioactive)soitlacomparaisond'une
grandeuràmesureravecuneunitédemêmeespèce(parex.comparaisond'unedistance
avecl'unitédelongueur).Lerésultatd'undénombrementestdéterminédefaçonunivoque
parunnombresansdimension,parcontrelerésultatd'unemesureparcomparaison,c'est‐
à‐direlenombremesuré,dépendduchoixdel'unité.Ilestdonctoutaussiimportant
d'indiquerl'unitéchoisiequelenombreobtenu.
LeSystèmeinternationald’unités(abrégéenSI),inspirédusystèmemétrique,estle
systèmed’unitéslepluslargementemployéaumonde,quiestdéfiniparlaConférence
généraledespoidsetmesures.Ils’agitd’unsystèmedécimal(onpassed’uneunitéàses
multiplesousous‐multiplesàl’aidedepuissancesde10),saufpourlamesuredutemps.On
parleaussidesystèmeMKSA,enréférenceauxunitésprincipalequilecompose:lemètre
(longueur),lekilogramme(masse),laseconde(temps)etl’ampère(courantélectrique).Ce
systèmeestcomposéde7unitésdebase;enplusdesquatreprécédentes,ilyaencorele
kelvin(température),lamole(quantitédematière)etlacandela(intensitélumineuse).
Touteslesautresunitéssontdéduitesdecesunitésdebase,maiscertainespossèdentun
nomparticulier(parexempleleNewtonpourlaforce,1[N]=1[kg∙m∙s‐2]).
Ilestessentiellementimpossiblededéterminerlavraievaleurd'unegrandeurphysique(par
ex.ladéterminationdelamassed'uncorpsparpesée).Celas'expliqueparlefaitqueles
instrumentsdemesureutilisés,demêmequelesorganesdessensdontonnepeutse
passer,nepossèdentpasunesensibilitéinfinie.Lalimitedesensibilitésetrouveimposéeen
dernierlieuparlastructureatomiquedelamatièreetlesphénomènesdefluctuations
statistiquesquiysontliés(parex.lemouvementbrownien).Unrésultatdemesureaurapar
conséquentplusoumoinsdechancesdes'approcherdelavraievaleurdelagrandeurà
mesurer,suivantlafinessedel'instrumentdemesureetl'habiletédel'expérimentateur.

3) Lesincertitudesdemesure
Ondistinguedifférentessortesd'erreursdonttoutemesurepeutêtreaffectée:leserreurs
systématiques,leserreursaccidentellesetladispersionstatistique.
i) Leserreurssystématiquesseproduisentparexemplelorsqu'onemploiedesunitésmal
étalonnées(échellefausse,chronomètremalajusté)oulorsqu'onnégligecertains
facteursquiontuneinfluencesurlamarchedel'expérience(parex.l'influencedu
champmagnétiqueterrestredansunemesuremagnétique).Celamèneàundécalage
(biais)durésultatsil‘erreurcommiseesttoujourslamême.Leserreurssystématiques
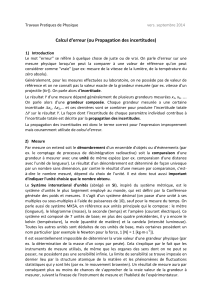
influencentl’exactitude(oujustesse)delamesure(voirFig.1.c).
Danslaplupartdescas,leserreurssystématiques,pourautantqu'onconnaisseleur
cause,peuventêtreprisesenconsidérationparunecorrectioncorrespondante
apportéeaurésultatdelamesure.Pourlesmesureseffectuéesdanslecadredetravaux
pratiquesdephysique,ellesn'ontengénéralqu'unesignificationdesecondplan.
ii) Leserreursaccidentellesparcontrenepeuventenprincipepasêtreévitées.Leurcause
setrouvedansl'expérimentateurlui‐même.Lasûretéaveclaquellelamainmanieun
instrument(parex.l’arrêtd'unchronomètre),l'exactitudeaveclaquellel'œilobserve
(parex.lapositiond'uneaiguillesuruneéchelle)oul'acuitédifférentielledel'oreille
(parex.pourladéterminationd'unminimumd'intensitésonore)sontlimitées.C'estla
tâchedetoutobservateurd'êtreconscientdeserreursaccidentellesdemesure,deles
mainteniraussifaiblesquepossibleetd'estimeroucalculerleurinfluencesurlerésultat
obtenu.
Leserreursaccidentellesaffectentlaprécision(oufidélité)delamesure(Fig.1.b).
Fig.1: Exactitudeetprécision:(a)Exactetprécis;(b)Exact,pasprécis;(c)Pasexact,maisprécis.
iii) Ladispersionstatistiqueapparaîtlorsqu’onfaitdes
mesuresrépétéesdelamêmegrandeur.Sil’on
mesureplusieursfoislemêmephénomèneavecun
appareildemesuresuffisammentprécis,on
obtiendraàchaquefoisunrésultatdifférentx
i
.Ceci
estdûàdesphénomènesperturbateurs(parex.
bruitdefondélectronique,sensibilitéd’un
instrumentauxvariationsdetempérature)ou,pour
desmesuresextrêmementprécises,àlanature
aléatoireduphénomène(chaos,incertitude
quantique).
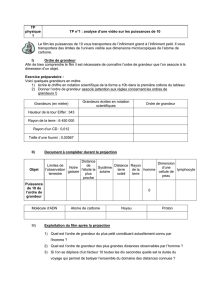
Fig.2:DistributiondeGauss.

Pourungrandnombredemesuresetphénomènesphysiques,onpeutgénéralement
postulerqueladistributiondesvaleursobtenuessuitunedistributiondeGauss
(distributionnormale).Notonsquecettedistributionn'estpastoujoursvalablecomme
lemontrel'exempledesphénomènesdedésintégration(distributiondePoisson).
LadistributiondeGaussestcaractériséepardeuxparamètres(voirFig.2):savaleur
moyennexoetsavarianceσ2(oudéviationstandard).DansladistributiondeGauss,
68%desmesuressontcomprisesentrexo‐etxo+95%entrexo‐2etxo+2et99.7%
entrexo‐3etxo+3
Ladispersionstatistiqueaffectelaprécisiondelamesure(Fig.1b).Lebutderépéterun
grandnombredefois(Nfois)lamesuredumêmeparamètreestd'obteniruneestimation
aussiprécisequepossibledelavraievaleurcherchéexo.Onconstatequecetteestimation
serad'autantplusprécisequeladistributiondeGaussestétroite,c’est‐à‐direqueσest
petit.Laméthodedemesure,lesappareilsutilisésainsiquel'habiletédel'expérimentateur
contribuentchacunàlagrandeurdeσ(parex:unchronomètreélectroniqueestplusprécis
qu'unchronomètremécanique,unfaisceaulumineuxassociéàunecellulephotoélectrique
seraplusprécisquel'œiletlamaindel'expérimentateurpourdétecterlepassaged’un
projectileenunpoint).
Lemeilleurestimateurdelavraievaleurxoestlamoyennearithmétique
x
desNrésultats
individuelsxi:
1
1N
i
i
x
x
N
(1)
Demême,lemeilleurestimateurdelavariancedeladistributiondexestdonnépar
22
1
1()
1
N
xi
i
x
x
N
(2)
Finalement,laprécisionaveclaquelleondéterminexoestdonnéeparlavariancedela
moyenne
x
qu’onnote
2
x:
22 2 22
1
111 1
()
(1) (1)
N
xx i
i
N
x
xxx
NNN NN
.(3)
CettevaleurvarieinversementaveclenombredemesuresN.Ainsi,sionveutdiminuerla
déviationstandarddelamoyenne
xd’unrésultatd'unfacteur2(c’est‐à‐direréduire
l’incertitudedemoitié),ilfautquadruplerlenombredemesures(oualorsaméliorerla
méthodeet/oulesappareils,sansparlerdel'expérimentateur!).
Lerésultatdelamesureestfinalementdonnésouslaforme:
x
x
Acôtédel'erreurabsolue
xd'unrésultatdemesure,ilestsouventcommoded'indiquer
l'erreurrelative
x
x
.L'erreurabsolueatoujourslamêmedimension(mêmeunité)quele
résultatdelamesurelui‐même.L'erreurrelativen'apasdedimensionets’exprimeen%ou
en‰.
Chiffressignificatifs:Lenombredechiffressignificatifsàindiquerdansunrésultatest
égalementfixéparlecalculdesincertitudes.Endonnertropesttoutaussifauxqued'en
donnertroppeu!Laconventionadmiseestlasuivante:toutrésultatdoitcomporterun
nombredechiffressignificatifstelquelederniersoitaffectédel'erreurfixéeparlecalcul
deserreurs;l'avant‐dernierparcontreestcertain.AinsiunemasseMpeséeà±2mget
trouvéeégaleparexempleà25.3873gseradonnéepar:
(25.387 0.002)gM.

4) Incertitudessurunemesurecomposée;loidepropagation
Lesmesureseffectuéesenphysiquesontleplussouventindirectes,c'est‐à‐direquele
résultatfinald'uneexpérienceneconsistepasenlamesure(répétéeounon)d'unseul
paramètre,maisdeplusieursgrandeursqui,liéesparuneloiphysique,conduisentau
résultatcherché.Chacunedecesgrandeursaunecertaineincertitude;lerésultatde
l’expérienceencomporteraaussiunequidépenddesincertitudesindividuelles.Onveut
déterminerdequellemanièrechacunedecesincertitudesserépercutesurlagrandeur
finale.
4.1)Propagationdesincertitudes
Illustronscelaparunexemplesimple(Fig.3).Sionveutdéterminerlasurfaced’unepièce,
onmesuresalongueurletsalargeurdetlasurfaceestdonnéeparlafonctionS=ld.Les
distancesmesuréescomportentuneincertitudelsurlalongueuretdsurlalargeur.
Commentdéduirel’incertitudeSsurlasurfacecalculée?
Envisageonslecasleplusdéfavorableetconsidéronsquelesincertitudesaugmentent
chaquefoislesgrandeursmesurées.L’incertitudeSsurlasurfacecorrespondalorsà
l’accroissementtotaldelasurface(voirFig.3a):
()( )Slld dlddlld ld
.(4)
Lederniertermepeutêtrenégligélorsquelesincertitudessurlesgrandeursmesuréessont
petitesparrapportauxgrandeurselles‐mêmes(x<<x),cequipermetdesimplifierlecalcul
d’erreurenconsidérantladifférentielle(variation)delafonctionparrapportauxdifférentes
variables(Fig.3b):
SS
Sdlld l d
ld
(5)
Fig.3: Accroissementtotal(a)etdifférentielle(b)delasurfaced’unrectanglede
longueurletdelargeurdcomportantdesincertitudes.Ladifférenceentreces
deuxgrandeursestlepetitrectanglerougedontlasurfacepeutêtrenégligée.
Plusgénéralement,onaurapourunefonctiondeplusieursvariablesf(x
1
,x
2
,x
3
,…):
12 3
12 3
...
fff
fxx x
xx x
(6)

Fig.4: L’incertitudefsurunegrandeurfrésultantdel’incertitudexsurunevariablex
dépenddelapentelocaledelacourbef(x),donnéeparladérivéepartielle
fx
.
Leprincipeconsistedoncàcalculerladérivéepartielle(notée
i
fx
)delafonctionfpar
rapportàchaquevariablex
i
,quireprésentel’accroissementdelafonctionfpourunepetite
variationdelavariablex
i
(voirFig.4).
Rappel:ladérivéepartielled’unefonctionparrapportàunevariablex
i
consisteàdériverla
fonctionparrapportàx
i
enconsidéranttouteslesautresvariablescommedesconstantes.
Quelquescassimples:
L’applicationdelapropagationdesincertitudesdécriteparlaformulegénérale(6)devient
particulièrementsimpledanslescasparticulierssuivants,souventrencontrésenpratique:
Somme/différence:lorsquelagrandeurcomposéen’estconstituéequedesommesoude
différences:
123
...yxx x,alors 123
... yxxx
(7)
Dansunesomme(différence),leserreursabsoluess’additionnent.
Produit/quotient:lorsquelagrandeurcomposéen’estconstituéequedeproduitsoude
quotients:
12 3
/ ...yxxx ,alors3
12
123
...
x
xx
y
yxx x
(8)
Dansunproduit(quotient),leserreursrelativess’additionnent.
Produitdepuissances:lorsquelagrandeurcomposéen’estconstituéequed’unproduitde
puissances
123
...yxx x
…,alors 3
12
123
...
x
xxy
yx xx
(9)
Danstouslesautrescas(parex.enprésencederelationstrigonométriques,delogarithmes,
deracines,etc…),laformulegénérale(6)doitêtreutiliséeencalculanttouteslesdérivées
partielles.
 6
7
8
6
7
8
1
/
8
100%




![III - 1 - Structure de [2-NH2-5-Cl-C5H3NH]H2PO4](http://s1.studylibfr.com/store/data/001350928_1-6336ead36171de9b56ffcacd7d3acd1d-300x300.png)