EXERCICES SUR LES ASSERVISSEMENTS NUMERIQUES
Exercice 17
Etudier la fonction de transfert en boucle fermée de l'asservissement par ordinateur d'un
système analogique du premier ordre encadré par le CNA et le CAN quand le correcteur est
une simple constante.
La fonction de transfert analogique est
ω
ω
0
0+p. Après numérisation elle devient :
()
()
Gz p
zp
pz
pz
=−
−=−
−
−
−
11
1
0
0
01
01 avec .
peTe
00
=−
ω
A G(z)
Donc
()
(
)
HzA pz
pz
BO =−
−
−
−
1
1
01
01 et
() ()
()
(
)
()
Hz Hz
Hz
Apz
pz A p z
BF BO
BO
=+=−
−+−
−
−−
1
1
11
01
0101
()
()
()
()
Hz Apz
pApz
BF =−
−−−
−
−
1
11
01
00
1 que l'on peut écrire, en posant AAA
'=+1 et
,
()
ppAp
00 0
1
'=− −
()
()
HzA pz
pz
BF =−
−
−
−
''
'
1
1
01
01
p00
'= quand Ap
p
=−
0
0
1 et devient négatif au delà. Finalement si
p01
'=− Ap
p
=+
−
1
10
0.
La réponse à un échelon est la transformée inverse de
(
)
Ap
zp
z
z
''
'
1
1
0
0
−
−⋅− qui s'écrit aussi
Azp
zp
''
'
110
0
−−−
⎛
⎝
⎜
⎜
⎞
⎠
⎟
⎟. Elle vaut donc : . La valeur finale est A
() ( )
yn A p un
un
=−
⎛
⎝
⎜⎞
⎠
⎟−
''
11
0'.
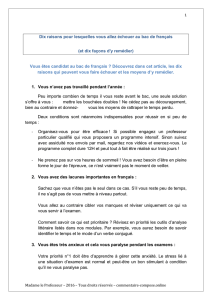
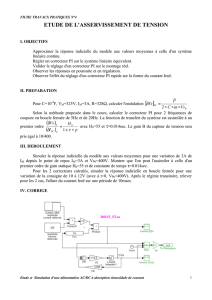
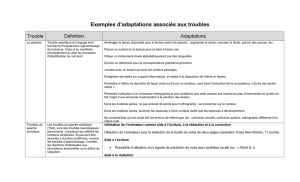
p'0 = 0,8782 f'0/fe = 0,0207
A = 3 A' = 0,75
p'0 = 0,7564 f'0/fe = 0,0444
A = 10 A' = 0,9091
p'0 = 0,3301 f'0/fe = 0,1764
A = 28 A' = 0,9655
p'0 = -0,7661
A = 1 A' = 0,5
f0/fe = 0,01 p0 = 0,94
0
0,5
1
0 102030405
0
BO (A=1) BF A= 1
BF A= 3 BF A= 10

BF
p
our A= 15,421
0
0,5
1
0 1020304050
BF A= 28
0
0,5
1
1,5
2
0 102030405
0
Exercice 18
On considère un système numérique comportant un zéro = 0,1 et deux pôles imaginaires
conjugués = 0,85 e±j2π0,13 avec un coefficient global = 1. Etudier la fonction de transfert en
boucle fermée :
1) S'il y a un retard additionnel (numérateur de degré 2) pour le correcteur HC(z) = 100.
2) Sans retard additionnel (numérateur de degré 1) pour le correcteur HC(z) = 100.
3) Sans retard additionnel pour le correcteur Hz zz
zz
C() ,,
,
=−+
−−
21164 0 723
01 11.
1) Si l'on considère que
()
Hz zz
zz
zz
zz
() ,
,cos( ,) ,
,
,,
=−
−⋅ + =−
−+
01
2 085 2 013 085
01
1164 0 723
22
2
2
π
alors on peut écrire Hz z
z
() ,
,,
101
11164 0723
1
1
−
−+
−
−
z
2−
ce qui conduit à :
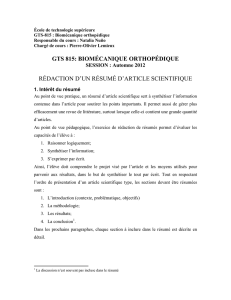
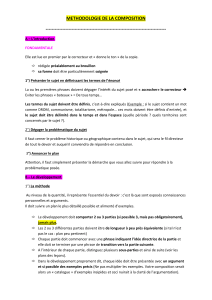
ax0 = 1 ax1 = -0,1 ay1 = 1,164 ay2 = -0,723.
Sa réponse à un échelon unité est la suivante :
Réponse à un échelon du processus seul
0
0,5
1
1,5
2
2,5
3
0 10203040506070809010
0
Si HC(z) = 100, la fonction de transfert en boucle fermée est :
Hz z
zzz
z
zz
BF() ,,
,
,,
=−
−+− + =−
−+
−
−−−
−
−−
100 10
100 10 1 1164 0 723
101
1
1
112
100
101
1
11164
101 10 723
101 2

Hz z
z
BF() , ,
,,
=−
−+
−
−
099 101
1 011 0 0072
1
1
z
−2
(pôles = 0,0846 e±j2π0,137 )
soit : ax0 = 0,99 ax1 = -0,099 ay1 = 0,11 ay2 = -0,00715.
Réponse à un échelon en boucle fermée
0,99
0,992
0,994
0,996
0,998
1
1,002
0 10203040506070809010
0
2) Mais si on prend
Hz z
zz
z
zz
() ,
,cos( ,) ,
,
,,
=−
−⋅ + =
−
−+
01
2 085 2 013 085
01
1164 0 723
222
π
Hz zz
z
() ,
,,
−−
−
−
−+
12
1
01
11164 0723
z
−
2
ce qui conduit à
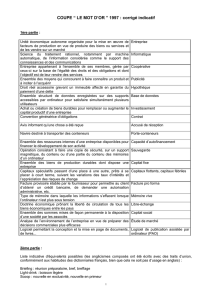
ax0 = 0 ax1 = 1 ax2 = -0,1 ay1 = 1,164 ay2 = -0,723. Sa réponse à un
échelon unité est la suivante :
Réponse à un échelon du processus seul
0
0,5
1
1,5
2
2,5
3
0 10203040506070809010
0
.Hz zz
zz z z
z
zz
BF() ,,
,
,,
=−
−+− + =−
+−
−−
−− − −
−
−−
100 10
100 10 1 1164 0 723 100 101
198836 9277
12
12 1 2
1
12
Les pôles sont égaux à 0,094 et -98,9. Le système est instable.
Il faut un correcteur plus élaboré.
Conclusion : Le simple retard d'un coup d'horloge complique considérablement le
problème.
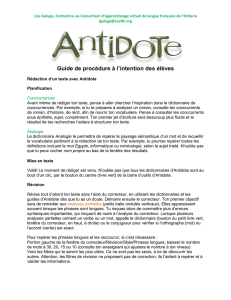
3) Considérons toujours Hz z
zz
() ,
,,
=
−
−+
01
1164 0 723
2 et prenons le correcteur de fonction de
transfert Hz zz
z
C() ,,
,
=−+
−
21164 0 723
01 11z−
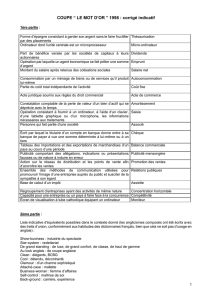
. Il est clair que Hzz
BO()=−
11 et donc que

Hzz
BF()=1
. Quelle que soit l'entrée, elle est reproduite exactement à un coup d'horloge
près.
Hz zz
zz
C() ,,
,,
=−+
−+
−−
−−
1 1164 0 723
111 01
12
12
ax0 = 1 ax1 = -1,164 ax2 = 0,723 ay1 = 1,1 ay2 = -0,1.
-1
-0,5
0
0,5
1
0 1020304050607080901
00
x(n)
y(
n
)
BF
Exercice 19
Un processus échantillonné est caractérisé par une relation de récurrence ayant les
coefficients suivants : ax0 = 0
ax1 = 1 ay1 = 1,6
ax2 = -0,9 ay2 = -0,8
On lui associe un correcteur dont la relation de récurrence a les coefficients suivants :
ax0 = 1
ax1 = -1,6 ay1 = 2
ax2 = 0,8 ay2 = -1
1) Donner l'expression de la fonction de transfert du processus à l'aide de polynômes ne
contenant que des puissances positives de z.
2) Donner l'expression de la fonction de transfert du correcteur à l'aide de polynômes ne
contenant que des puissances positives de z. Quelle particularité intéressante présente-t-
elle ?
3) Calculer la fonction de transfert en boucle ouverte HBO(z).
4) Calculer la fonction de transfert en boucle fermée HBF(z). Que vaut HBF(1) ? Est-ce
normal ?
5) Quelle est l'erreur de poursuite à vitesse constante du système asservi ?
6) Trouver l'expression générale de la réponse impulsionnelle en boucle fermée.
1)
()
Gz z
zz
=−
−+
09
16 08
2,
,,

2)
() ()
Hz zz
zz
zz
z
C=−+
−+ =−+
−
2
2
2
2
16 08
21
16 08
1
,, ,,
contient une double intégration (erreur statique et
erreur de poursuite à vitesse constante nulle).
3)
() () ()
Hz z
zz
zz
z
z
z
BO =−
−+
⋅−+
−=−
−
09
16 08
16 08
1
09
1
2
2
22
,
,,
,, ,
.
4)
() ()
()
Hz Hz
Hz z
zz
BF BO
BO
=+=−
−+
109
01
2,
,. HBF(1) = 1 (erreur statique nulle).
5)
() ()
(
)
(
)
(
)
(
)
ε
∞= − ⋅ = = =
→−+→−
−
−+−
lim lim
,,
ite
zz
zHz ite
zz
zz
zz
zBO
11
1
111 1
109
0
01
10
2
2
2.
6)
()
Hz
BF z
zz zz
==−
−
−+ −−
09
01
10164
0113 0 0164
0 887
2,
,
,,,,
et donc .
() ( ) ( )
[]
()
hn un
nn
=⋅ −⋅ −
−−
10164 0113 00164 0887 1
11
,, ,,
Exercice 20
On considère deux processus
()
Gz zz
zz
1
2
205 15
15 064
=−−
−+
,,
,,
et
()
()
()
Gz zz
zz z
2
2
205 05
13 049 03
=−−
−+ +
,,
,, .
.
Qu'est-ce qui les distingue du point de vue du correcteur qu'on peut leur associer?
Un correcteur PID est-il envisageable pour les deux.
()
()
()
Gz zz
zz
1215 1
15 064
=−+
−+
,
,,
comporte un zéro "instable" alors que les deux zéros de
()
()
(
)
()
()
Gz zz
zz z
2205 1
13 049 03
=+−
−+ +
,
,, .
sont stables. Un correcteur du type compensation des pôles
n'est donc pas possible pour le premier. Bien entendu Un correcteur PID est parfaitement
envisageable pour les deux.
Exercice 21
Un processus analogique a comme fonction de transfert
()
Hp pp
=
++
−−
1
110 610 36
36
2
.
On souhaite l'asservir à l'aide d'un micro-ordinateur muni de ses cartes d'entrée-sortie CAN
et CNA. Proposer un correcteur qui assure une erreur de poursuite à vitesse constant nulle et
calculer la relation de récurrence à programmer pour la loi de commande. On précise que
l'échantillonnage est effectué à 10 kHz et que l'on souhaite que l'erreur de poursuite soit nulle
dès le troisième coup d'horloge compté à partir du début de la rampe.
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%