Propriétés des Matériaux : Déformation, Essais, Propriétés Physiques
Telechargé par
kennengoumkwaangekabrel

Chapitre IV PROPRIETES DES MATERIAUX
IV.1 Propriétés mécaniques
IV.1.1 Déformation élastique des solides
IV.1.1.1 Origine physique
Dans un solide, la distance moyenne d entre deux atomes s’établit à une valeur d0 fonction de la nature
des liaisons. Si on impose aux atomes un déplacement au voisinage de leur position d’équilibre, la force
d’interaction les rappelle à la distance d0 (sauf dans le cas d’un écartement au-delà de dd, distance de
dissociation des atomes). De telles déformations élastiques nécessitent donc l’application d’une force
extérieure pour vaincre la force de rappel et sont réversibles lorsque cette force extérieure est supprimée.
IV.1.1.1 Elasticité linéaire isotrope
Pour de faibles déplacements, la force de rappel peut être considérée comme proportionnelle au
déplacement d – d0. Les allongements (ou raccourcissements) relatifs ou déformations ε du solide, sont alors
proportionnels à la densité surfacique de force, ou contrainte σ, ce que traduit la loi de Hooke :
Les contraintes s’exprimant en MPa (ou N/mm2) et les déformations étant sans dimensions, le coefficient
E, appelé module d’élasticité à la traction ou module de Young du matériau, s’exprime en MPa.
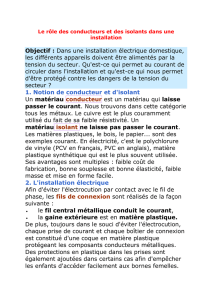
Simultanément à la déformation dans la direction d’application de la force, des déformations de signe opposé se
produisent dans les directions orthogonales. Dans les axes de la figure 1, les déformations élastiques peuvent
toutes s’exprimer en fonction de la contrainte σx appliquée dans la direction x :
v, sans dimension, est ici le coefficient de Poisson, autre constante caractéristique du comportement
élastique du matériau. Dans le cas d’une contrainte tangentielle de cission τ (figure 1.b), une déformation par
distorsion γ apparaît, qui est approximativement proportionnelle à la cission appliquée.
Figure 1. Schéma des déformations élastiques provoquées par différentes sollicitations. a) Contrainte de
traction uni-axiale σx. b) Contrainte de cission τxy dans le plan xy. c) Pression hydrostatique p.
La constante G (ou μ) est appelée module d’élasticité au cisaillement du matériau, en MPa.

Par ailleurs, une compression hydrostatique sous une pression p (figure 1.c) permet de définir le module de
compressibilité K (ou χ) du matériau, en MPa, à partir de la variation relative de volume :
Dans le cas courant d’un matériau isotrope, deux constantes d’élasticité (E et ν par exemple) suffisent à
caractériser son comportement élastique.
Les constantes E, ν, G et K ne sont donc pas indépendantes, mais peuvent toutes s’exprimer en fonction
de deux d’entre elles grâce aux relations :
L’hypothèse de linéarité des déformations élastiques n’est valable que pour des amplitudes de
déformation inférieures à environ 1 %. C’est le cas pour les matériaux métalliques et minéraux. Les polymères
et surtout les élastomères (jusqu’à 200 ou 300 % de déformation élastique), présentent un comportement
élastique non linéaire plus complexe et d’origine différente.
Le comportement élastique, caractérisé par la réversibilité des déformations lors de la suppression des
contraintes, ne se manifeste seul que pour des contraintes inférieures à une valeur limite, appelée limite
d’élasticité. Au-delà de cette valeur, des déformations permanentes s’ajoutent aux déformations élastiques ou
bien la rupture se produit.
IV.1.2 Déformation plastique des solides et striction
Lorsqu'un fil métallique est soumis à un effort d'élongation ou traction (figure 1), on constate qu'au-delà
de la limite élastique du matériau il subsiste un allongement résiduel. Le comportement devient différent de
celui de la zone élastique : plus la traction augmente, plus l'allongement résiduel augmente, ceci jusqu'à la
rupture du fil. Ce comportement particulier correspond à la plasticité ou ductilité du matériau. L'allongement
résiduel s'accompagne de la réduction de la section du fil (puisque la masse volumique reste constante, si la
longueur totale augmente, la section diminue) : cet effet s'appelle striction et conduit à la rupture. La diminution
relative de section après cette rupture est caractérisée par un coefficient de striction As.
S0 est l’aire de la section initiale, et Sr l’aire de la section après rupture.
Certains matériaux ont un domaine
plastique peu étendu : ils se brisent dès la limite
élastique. Ces matériaux sont fragiles.
La plasticité peut être, dans une certaine
mesure, corrélée à la nature de la liaison chimique
dominante dans le matériau : les métaux sont
ductiles tandis que les matériaux à liaison ionique,
covalente ou moléculaire sont fragiles.
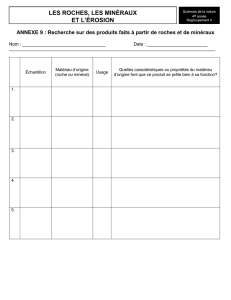
Figure 2. courbe effort-déformation

Une courbe de traction du type de la figure 2 permet de déterminer les grandeurs caractéristiques
suivantes :
• le module d’élasticité E (ou module de Young) donné par la pente de la partie élastique ;
• la limite d’élasticité Re qui donne la valeur de la contrainte nominale théorique à partir de laquelle
le matériau commence à se déformer plastiquement. Comme la déformation plastique apparaît souvent
progressivement, la limite d’élasticité est difficile à déterminer avec précision, et on adopte en général une
limite conventionnelle d’élasticité R0,2 qui est la contrainte nominale correspondant à une déformation
permanente de 0,2 % ;
• la résistance à la traction Rm qui est définie par la contrainte nominale maximale supportée par
l’éprouvette ;
• la déformation à la rupture qui correspond à la déformation plastique nominale à la rupture en
traction de l’éprouvette.
IV.1.3 Essais mécaniques
IV.1.3.1 Essai de traction
L'essai de traction consiste à exercer un effort croissant, de façon continue, selon l'axe d'une éprouvette
constituée du matériau à étudier. L'éprouvette doit avoir une forme géométrique et des dimensions parfaitement
définies et reproductibles. L'essai est en général poursuivi jusqu'à la rupture de l'éprouvette.
IV.1.3.2 Essai de résilience
L'essai de résilience consiste à mesurer la résistance au choc, autrement dit la ténacité du matériau.
L'éprouvette est un barreau entaillé et l'essai consiste à mesurer l'énergie absorbée par l'éprouvette pour observer
sa rupture fragile.
IV.1.3.3 Essais de dureté
La dureté est la résistance qu'un matériau oppose à la pénétration d'un autre matériau plus dur que lui. Le
corps dur étranger est utilisé sous forme d'un poinçon de forme variable selon le type d'essai.
• Méthode Brinell
Le poinçon est une bille en acier ultra dur. La dureté Brinell est donnée par :
H = P/S
où
P
est la
charge et
S
la surface de l'empreinte. Pour calculer
S
, il faut connaître la profondeur p de pénétration,
l'empreinte étant une calotte sphérique. Si
D
est le diamètre de la bille et
d
le diamètre du cercle de
l'empreinte :
• Méthode Vickers
Le poinçon, en diamant, est une pyramide à base carrée dont l'angle au sommet vaut 130°. Si
d
est
la diagonale de l'empreinte carrée laissée par la pyramide après l'essai, avec la même définition de la dureté
:
• La méthode Rockwell
Le poinçon est soit une bille pour les matériaux tendres, soit une pointe conique à bout sphérique en
diamant pour les matériaux durs.

IV.1.3.4 Essais de fluage
En fait, à température élevée, la déformation plastique sous contrainte constante augmente avec le temps :
c'est le fluage. Pour une contrainte et une température données, on suit l'allongement en fonction du temps, ce
qui permet de déterminer la vitesse de fluage :
IV.1.3.5 Essais de fatigue
Un matériau ductile, possédant une courbe de traction normale, casse lorsque la contrainte est supérieure
à la charge de rupture. Si la contrainte est inférieure à la charge de rupture, la limite élastique est augmentée par
l'écrouissage subi après l'allongement plastique. Ce qui précède est vrai tant que la contrainte reste constante ou
bien évolue lentement dans le temps. Il n'en va plus de même si la contrainte devient rapidement oscillante et le
matériau subit une rupture par fatigue pour une charge bien inférieure à la charge de rupture statique. Le
principe de l'essai repose sur la répétition d'un très grand nombre de sollicitations d'amplitude connue, à une
fréquence connue : flexion ou torsion.
IV.2 Propriétés physiques
IV.2.1 Propriétés électriques
La conduction électrique d’un matériau dépend de la mobilité des électrons (ou des ions) qu’il contient
dans le champ électrique extérieur imposé. Cette mobilité dépend de la structure électronique et donc de la
nature des atomes constituant le matériau. Comme seuls les électrons dont l’énergie est supérieure au niveau de
Fermi peuvent participer à la conduction, celle-ci est forte pour les matériaux métalliques (conducteurs), faible
ou inexistante pour les matériaux organiques et minéraux (diélectriques).
IV.2.1.1 Résistivité électrique
La résistivité électrique ρ (Ω · m) d’un matériau ou son inverse la conductibilité électrique σ (Ω– 1 · m– 1),
traduit la mobilité des électrons de conduction créant une densité de courant J (ampères/m2) dans un champ
électrique E (volt/m) : E = ρ · J = J/σ
Elle conditionne la résistance électrique R (Ω) d’un conducteur de longueur l et de section S :
R = ρ · (l/S)
La résistivité est extrêmement sensible à la pureté et à la composition. De même, au-dessus de 0,2 fois la
température de Debye d’un solide considéré, sa résistivité augmente linéairement avec la température en raison
de l’augmentation des chocs entre les électrons, les ions et le nombre croissant d’imperfections du réseau.
Lorsque la température s’abaisse, la résistivité tend vers une limite finie, sauf pour quelques matériaux qui
deviennent supraconducteurs (supraconductivité) : au-dessous d’une température dite critique, leur résistivité
s’annule en raison de mouvements coopératifs des électrons.
Les valeurs de la résistivité couvrent plusieurs ordres de grandeur, depuis 10– 8 Ω · m pour les métaux
jusqu’à 1017 Ω · m pour les polymères. La conductibilité du cuivre recuit de haute pureté (0,580 · 108 Ω– 1 · m– 1)
est prise par convention comme valeur de référence égale à 100 % IACS (International Annealed Copper
Standard).
Tableau I. Résistivités électriques
Matériau
Résistivité à 20 °C (Ω · m)
Métaux et alliages
Acier au carbone
1,6 · 10– 7
Aluminium, pureté
commerciale
2,65 · 10– 8

Semi-conducteurs (résistivité intrinsèque)
Arséniure de gallium GaAs
106
Silicium
2,5 · 103
Céramiques et minéraux
Carbure de silicium SiC
1 à 109
Diamant (synthétique)
1,5 · 10– 2
Polymères et élastomères
Élastomère butadiène-
acrylonitrile
3,5 108
Polystyrène (PS)
> 1014
IV.2.1.2 Permittivité électrique
Un matériau sans électrons de conduction (diélectrique, à résistivité élevée) contient néanmoins des
charges électriques localisées (électrons, protons ou ions) susceptibles de se déplacer à courte distance sous
l’effet d’un champ électrique extérieur E, provoquant ainsi une polarisation du matériau. La permittivité
électrique ε (F/m) caractérise cette polarisabilité.
Un condensateur dont les deux plaques d’aire A sont séparées par une épaisseur e de vide, de permittivité
de référence ε0 = 8,854 · 10– 12 F/m, possède une capacité C = ε0 · A/e. Un condensateur dont les deux plaques
sont séparées par un matériau diélectrique de permittivité ε voit sa capacité augmentée dans le rapport ε/ε0 = εr =
(1 + χ).
εr est la permittivité relative ou constante diélectrique, χ est la susceptibilité électrique du matériau.
En cas de champ électrique alternatif, la permittivité varie avec la fréquence d’oscillation par dissipation
d’énergie sous forme thermique lors du déplacement des charges à chaque cycle. Cette proportion d’énergie
dissipée est caractérisée par un facteur de perte.
Une autre caractéristique importante dans les applications des isolants est leur tension de claquage. Elle
représente la valeur maximale de tension, en V/m, à partir de laquelle un arc électrique peut être généré dans le
matériau par une éjection en avalanche des électrons de la bande de conduction.
Toutes ces caractéristiques sont très sensibles à la pureté du matériau.
Tableau II. Caractéristiques des matériaux diélectriques
Matériau
Permittivité relative εr (à 106 Hz)
Facteur de perte
Tension de claquage (106 V/m)
Milieux de référence
Vide élevé
1
0
100
Eau
80
≈ 0,1
Céramiques et minéraux
Alumine Al2O3
4,5 à 9
2 · 10– 3
6
Titanates
15 à 12 000
2 · 10– 3
2 à 12
Polymères et élastomères
Caoutchouc naturel
3 à 4
10– 2 à 10– 3
12 à 24
Nylon (Polyamide 6-6)
3 à 4
10– 2 à 10– 3
10 à 20
IV.2.1.3 Ferroélectricité et piézoélectricité
Les matériaux ferroélectriques possèdent une polarisation électrique naturelle et permanente en raison
d’une structure où les barycentres des charges négatives et positives ne coïncident pas dans la maille élémentaire
(par exemple le titanate de baryum BaTiO3). Dans les cristaux, les dipôles électriques ainsi constitués sont tous
orientés dans la même direction à l’intérieur de domaines ferroélectriques séparés de leurs voisins par des
parois. En l’absence de champ électrique extérieur, les directions de polarisation de ces domaines sont
aléatoires et la polarisation résultante est nulle. Sous champ, les domaines dont l’orientation dipolaire est proche
de celle du champ imposé s’étendent aux dépens de leurs voisins par migration des parois.
Comme ils possèdent des constantes diélectriques très élevées, ces matériaux ferroélectriques sont
fréquemment utilisés dans les condensateurs, en dépit de leur facteur de perte élevé dû à une importante
hystérésis de polarisation.
Dans les matériaux piézoélectriques, comme le quartz, ce sont les déformations élastiques de la maille
cristalline sous contrainte qui provoquent la polarisation électrique par décalage des barycentres des charges
positives et négatives. Inversement, l’application d’un champ électrique provoque une polarisation induite qui
s’accompagne d’une déformation élastique du cristal. Ces particularités permettent d’utiliser les cristaux
piézoélectriques soit comme capteurs électriques de pression, soit comme actionneurs électromécaniques. On
peut, en particulier, en faire des émetteurs ou des récepteurs d’ondes ultrasonores entre 0,5 MHz et 5 GHz.
 6
7
8
9
6
7
8
9
1
/
9
100%





![[2] Qu`est-ce que la haute tension](http://s1.studylibfr.com/store/data/003033912_1-595c5f9c1318e2d57c81a3be6901076c-300x300.png)