Denis Rabasté 1/10
IUFM Aix Marseille
Commande de moteurs à courant continu et pas à pas par
FPGA
L’objectif de cette séance est de commander un moteur à courant continu puis un moteur pas à pas
par l’association de la carte de développement DE2 et d’une carte auxiliaire intégrant les circuits de
puissances.
A travers la synthèse de ces projets, nous nous familiariserons avec la notion de machine d’état.
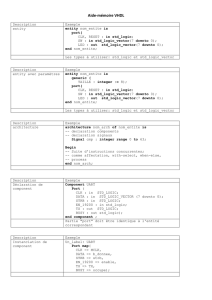
1 Descriptif de la carte auxiliaire
Nous utilisons pour notre carte auxiliaire un circuit L298, au sein duquel sont implantés deux ponts en
H, associé à la logique de commande, comme l’indique la structure interne de ce circuit sur la figure
suivante :
Comme on peut le noter sur la figure précédente, les diodes de puissance ne sont pas intégrées dans
le L298, il faut les ajouter sur la carte, comme le montre la figure suivante. Il est alors possible de
commander deux moteurs à courant continu (sortie OUT1-OUT2 ou bien OUT3-OUT4) ou un moteur
pas à pas bipolaire deux phases (les deux phases étant connectée respectivement en OUT1-OUT2 et
OUT3-OUT4).

Commande de moteur à courant continu et pas à pas par FPGA
Denis Rabasté 2/10
IUFM Aix Marseille
L’alimentation Vss en 5V (partie commande) est faite directement par la carte DE2, tandis que
l’alimentation de puissance Vs se fait par les entrées « + » et « masse » de la carte auxiliaire via une
source externe, avec une tension dépendant des moteurs utilisés (maximum 46 V). Une diode de
protection évite l’inversion de polarité de l’alimentation (mais crée une chute de tension de 0,7 V).
Deux résistances « shunt » RS1 et RS2 permette de mesurer le courant passant par les transistors de
puissance.
Les bornes du FPGA reliées au circuit L298 sont données en annexe.
2 Alimentation de puissance de la carte et mesure
Pour alimenter la partie puissance le la carte, respecter le protocole suivant :
- utiliser pour Vs une alimentation stabilisée incluant une limitation de courant ;
- l’alimentation étant déconnectée de la carte, régler sa sortie à 6 V ;
- mettre la sortie en court-circuit et limiter le courant à 0,5 A ;
- supprimer le court-circuit et relier maintenant l’alimentation à la carte auxiliaire.
Pour effectuer des mesures à l’oscilloscope, on placera les sondes aux points tests prévus à cet
effet, et uniquement sur ces points. Les parties du schéma associées à ces points tests sont
donnés en annexe.
3 Mise en œuvre de la commande d’un moteur à courant continu
3.1 Descriptif du programme
Nous allons tester notre carte en pilotant un moteur à courant continu. Nous implantons pour cela
dans le FPGA de la carte DE2, le programme correspondant au descriptif suivant :
PIN_N2
VCC
H
INPUT
PIN_G26
VCC
BP1
INPUT
PIN_N23
VCC
BP2
INPUT
PIN_W26
VCC
RST
INPUT
PIN_M19
S_MLI
OUTPUT
PIN_M23
NS_MLI
OUTPUT
PIN_K25
ENB
OUTPUT
PIN_N24
ENA
OUTPUT
PIN_R24
S_MLIB
OUTPUT
PIN_R20
NS_MLIB
OUTPUT
PIN_AE22
LED_BP1
OUTPUT
PIN_W19
LED_BP2
OUTPUT
PIN_AA20
LED_RST
OUTPUT
H
BP1
BP2
IMP_BP1
IMP_BP2
bp_imp
inst
H C_OUTS
div_50
inst3
clock
reset
BPLUS
BMOINS
CONS[7..0]
Seq
inst4
VCC
RSTRST
BP1
H
C_EN
CONS[7..0]
S_MLI
NS_MLI
MLI
inst5
Ce programme génère en sortie un signal modulé en largeur d’impulsion, « S_MLI » est envoyé sur
l’entrée In1 du circuit L298, tandis que son complémentaire « NS_MLI » est envoyé sur l’entré In2.
L’entrée ENA du L298 est fixée au niveau logique 1.
Les mêmes signaux « S_MLIB » « NS_MLIB » et Vcc sont envoyés sur les commandes du second
pont via les entrées In3, In4 et ENB.
Les signaux modulé en largeur d’impulsion sont obtenus en comparant la valeur d’un signal de
consigne « CONS[7..0] » sur huit bits, à la valeur de sortie d’un compteur huit bits, incrémenté par le
signal d’horloge à 50 Mz lorsque le signal d’autorisation C_EN (Clock Enable), à environ 5 MHz le
permet. Le cycle complet de 2
8
=256 impulsions, correspond alors a une fréquence de découpage de
5 MHz/256, soit environ 20 kHz.

Commande de moteur à courant continu et pas à pas par FPGA
Denis Rabasté 3/10
IUFM Aix Marseille
Le signal C_OUT (alimentant C_EN) à 5 MHz est obtenu par la division par 10 de l’horloge à
50 MHz de la carte DE2, par le bloc « div_50 »
.
Grâce au bloc séquenceur « SEQ », ce programme test va permettre de régler 5 vitesses différentes
pour le moteur, en fonction de l’appui sur les boutons poussoir BP1 et BP2 (ce qui générera les
signaux BPLUS et BMOINS) de la carte DE2.
Pour passer à la vitesse supérieure ou inférieure ; ces 5 vitesses correspondent à 5 valeurs de la
consigne « CONS » et donc à 5 valeurs de rapport cyclique aux bornes du moteur.
On établi sans difficulté que le rapport cyclique α est donné par l’expression :
α= CONS/255,
et la tension moyenne aux bornes du moteur par la relation classique d’un pont en H :
Umoy = Vs (2 α-1) Vs étant la tension d’alimentation du pont
Les 5 valeurs de consigne imposées par le séquenceur sont :
- 0, ce qui correspond à une vitesse maximale du moteur en sens négatif (α=0, Umoy=-Vs) ;
- 64, soit la moitié de la vitesse maximale du moteur, en sens négatif (α=0,25, Umoy=-Vs/2) ;
- 128, soit une vitesse nulle (α=0,5, Umoy=0) ;
- 192, soit la moitié de la vitesse maximale en sens positif (α=0,75, Umoy=Vs/2) ;
- 255, soit la vitesse maximale en sens positif (α=1, Umoy=Vs).
Le fonctionnement du séquenceur a été décrit par la machine d’état suivante (voir le sujet sur la
machine d’état pour plus de précisions) :
Le passage d’un état au suivant, se fait à chaque coup d’horloge en testant les boutons poussoir :
- pour augmenter la vitesse (en valeur relative), il faut vérifier la condition
BMOINSBPUS .
(ce qui se traduit par « BPLUS & ~BMOINS » dans la syntaxe de description de machine
d’état au sein de Quartus),
- pour diminuer la vitesse, il faut vérifier la condition
BPLUSBMOINS .
;
- une réinitialisation de la machine d’état, par appui sur le bouton poussoir « RST », place celle-
ci dans l’état E128, qui correspond à l’arrêt du moteur ;
Remarques : l’utilitaire de description de machine d’état de Quartus impose que les conditions de
passage d’un état à l’autre soit exclusives (deux conditions ne peuvent être valides en même temps) ;
on ne peut donc avoir comme conditions BPLUS pour une branche et BMOINS pour l’autre.
L’horloge du système fonctionnant à 50 MHz, les informations BPLUS et BMOINS sont testées 50
millions de fois par secondes ; pour un fonctionnement correct, un appui sur les boutons poussoirs
correspondants, doit donc durer une impulsion d’horloge.

Commande de moteur à courant continu et pas à pas par FPGA
Denis Rabasté 4/10
IUFM Aix Marseille
Le bloc « BP_IMP » a pour rôle de convertir le NL0 de durée aléatoire, obtenu lors de l’appui sur les
boutons poussoir BP1 et BP2, en signaux au NL1 de durée 20 ns (soit une période de l’horloge à 50
MHz).
Le bloc « BP_IMP » peut être vu comme un détecteur de front descendant.
Comme on peut le voir sur le schéma général associé au programme, les différents boutons poussoirs
sont associés à des DEL, afin d’en visualiser l’appui.
3.2 Mise en œuvre
Ouvrir un nouveau projet dans Quartus.
Proposer un programme VHDL permettant de synthétiser les blocs « div_50 » et « MLI » ; simuler les
solutions obtenues.
Etudier la syntaxe VHDL du bloc BP_IMP donné en annexe et dans le dossier ressource
« ressources/TP_Quartus/TP6_mcc_pap/mcc » et simuler le fonctionnement du programme.
Synthétiser le séquenceur « Seq » à l’aide de l’utilitaire de Quartus (voir le cours sur les machines
d’état) et simuler le résultat.
Regrouper ces sous ensembles dans un schéma général, compiler le projet et programmer le FPGA
sans alimenter la carte auxiliaire et vérifier à l’oscilloscope que le fonctionnement est bien celui
attendu.
Connecter le moteur et l’alimentation suivant le protocole indiqué au chapitre 2, et tester le
fonctionnement.
En cas de problèmes, on trouvera des exemples de solutions dans le dossier ressource et en annexe.
4 Mise en œuvre de la commande d’un pas à pas
4.1 Descriptif du programme
Le programme implanté dans le FPGA de la carte DE2 est associé au schéma suivant :
H C_OUTS
div_1s
inst2
VCC
H
INPUT
VCC
RST
INPUT
VCC
Sens
INPUT
VCC
P_demiP
INPUT
P_demiP
Sens
RST LED_RST
OUTPUT
LED_SENS
OUTPUT
LED_p_demip
OUTPUT
SEG[6..0]
OUTPUT
PH[3..0]
OUTPUT
ENA
OUTPUT
ENB
OUTPUT
VCC
PIN_N2
PIN_G26
PIN_N23
PIN_W26
PIN_AE22
PIN_W19
PIN_AA20
PIN_N24
PIN_K25
PIN_M19
PIN_M23
PIN_R24
PIN_R20
PIN_AF10
PIN_AB12
PIN_V13
PIN_V14
PIN_AC12
PIN_AD11
PIN_AE11
BCD[3..0] SEG[6..0]
DECODEUR
inst1
C_EN
clock
C_EN
reset
S
P
PH[3..0]
ETAT[3..0]
SEQ
inst
C_EN
Le bloc « div_1s » nous génère un signal d’horloge de période 1 secondes, en divisant par 50 millions
l’horloge à 50 MHz de la carte DE2.
Cette horloge d’une seconde va commander un séquenceur, permettant au moteur de fonctionner
dans un sens ou dans l’autre suivant que le bouton poussoir relié à l’entrée « Sens » est appuyé ou
non, et en mode « pas entiers une phase » ou en mode « demi-pas » suivant que le bouton poussoir
associé à l’entrée « P_demiP » est appuyé ou non.
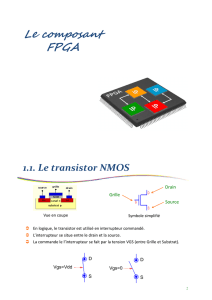
La sortie « PH[3..0] » du séquenceur envoie les signaux adéquat sur les entrées In1 à In4 du circuit
L298, suivant les chronogrammes représentés ci-dessous :

Commande de moteur à courant continu et pas à pas par FPGA
Denis Rabasté 5/10
IUFM Aix Marseille
Fonctionnement en mode pas entier une phase
(un seul sens de rotation représenté)
Fonctionnement en mode demi-pas
(un seul sens de rotation représenté)
Un bouton poussoir associé à l’entrée « RST » permet de réinitialiser le séquenceur.
Des diodes électroluminescentes de la carte DE2 permettent de visualiser l’appui sur ces boutons.
On notera que le séquenceur est rendu synchrone grâce à une entrée d’autorisation d’horloge
« C_EN ». Contrairement au programme précédent, le rapport de division de l’horloge étant important,
cette option est ici indispensable.
La machine d’état suivant décrit le fonctionnement de notre séquenceur :
Comme indiqué précédemment, le passage d’un état à l’autre se fait :
- uniquement si « C_EN » est au NL1 quel que soit les états,
- dans un sens ou dans l’autre suivant l’entrée « S »,
- en passant par tous les états, ou juste les états pairs, suivant l’entrée « P ».
La sortie « PH[3..0] du séquenceur commande les entrés Inx du L298, tandis que la sortie
« ETAT[3..0] » permet de visualiser le numéro de l’état actif, et de l’indiquer sur un afficheur 7
segments de la carte DE2, grâce au bloc « DECODEUR », réalisant la conversion BCD / 7 segments.
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%