LES CIRCUITS DE PUISSANCE ELECTRIQUE
Chapitre 9 : Démarreurs et variateurs de vitesse
électroniques
Lycée Professionnel P&M Curie – Aulnoye Aymeries
94
XXV – DEMARREURS ET VARIATEURS DE VITESSE ELECTRONIQUES :
La commande des moteurs électriques par des ensembles de commutation TOR est une solution bien adaptée à
l’entraînement d’une grande variété de machines. Mais elle s’accompagne de contraintes qui peuvent s’avérer
gênantes pour certaines applications :
Appel de courant de démarrage pouvant perturber la marche d’autres appareils connectés au réseau
A-coups mécaniques lors des démarrages et des arrêts inacceptables pour la machine ou le confort et la
sécurité des usagers
Fonctionnement à vitesse constante
Les démarreurs et variateurs de vitesse électroniques suppriment ces inconvénients. Destinés à la commande de
moteurs à courant continu ou alternatif, ils assurent une mise en vitesse et une décélération progressive et
permettent une adaptation précise de la vitesse aux conditions d’exploitation.
Suivant la nature du moteur, les variateurs utilisés sont du type redresseur contrôlé, convertisseur de fréquence
ou gradateur de tension.
251 – Principaux types de variateurs :
Un variateur est un convertisseur d’énergie dont le rôle consiste à moduler l’énergie électrique fournie au moteur.
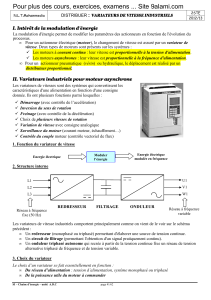
Redresseur contrôlé : il fournit à partir d’un réseau alternatif
monophasé ou triphasé un courant continu avec contrôle de la valeur
moyenne de la tension. La variation de cette tension est obtenue en
modifiant l’angle de retard à l’amorçage des semi-conducteurs de
puissance. Ce type de variateur alimente des moteurs à courant continu,
le plus souvent à excitation séparée.
Convertisseur de fréquence : il fournit, à partir d’un réseau
monophasé ou triphasé à fréquence fixe, une tension alternative de
valeur efficace et de fréquence variables selon une loi U/f = constante. Il
est utilisé en variateur de vitesse pour les moteurs asynchrones à cage.
U/f
Gradateur de tension : il fournit, à partir d’un réseau monophasé
ou triphasé, un courant alternatif de fréquence fixe égale à celle du
réseau avec un contrôle de la valeur efficace de la tension. La variation
de cette tension est obtenue en modifiant l’angle de retard à l’amorçage
des semi-conducteurs de puissance. Il est couramment utilisé comme
démarreur progressif pour les moteurs asynchrones à cage standards
dans la mesure où un couple de démarrage élevé n’est pas nécessaire.
Il peut également être employé comme variateur de vitesse pour les
moteurs asynchrones à cage résistante ou à bagues.
252 – Principales fonctions :
Accélération contrôlée : la mise en vitesse du moteur est contrôlée au moyen d’une rampe d’accélération
linéaire ou en S. Cette rampe est généralement réglable et permet par conséquent de faire varier le temps de mise
en vitesse.
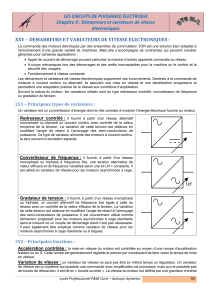
Variation de vitesse : un variateur de vitesse ne peut pas être en même temps un régulateur. Un variateur
de vitesse est un système qui possède une commande avec amplification de puissance, mais qui ne possède pas
de boucle de rétroaction. Il est dit en « boucle ouverte ». La vitesse du moteur est définie par une grandeur d’entrée

LES CIRCUITS DE PUISSANCE ELECTRIQUE
Chapitre 9 : Démarreurs et variateurs de vitesse
électroniques
Lycée Professionnel P&M Curie – Aulnoye Aymeries
95
(tension ou courant) appelée consigne de référence. Pour une valeur donnée de la consigne, cette vitesse peut
varier en fonction des perturbations (variation de la tension du réseau, de la charge, de la température). La plage
de vitesse s’exprime en fonction de sa vitesse nominale.
Variateur Moteur
Consigne de
Vitesse
Régulateur de vitesse : un régulateur de vitesse est un variateur asservi. Il possède un système de
commande avec amplification de puissance et une boucle de retour. Il est dit en « boucle fermée ». La vitesse du
moteur est définie par une consigne. La valeur de la consigne est en permanence comparée à un signal de retour,
image de la vitesse du moteur. Ce signal est généralement délivré par une génératrice tachymétrique ou un
générateur d’impulsions monté en bout d’arbre du moteur. Si un écart est détecté suite à une variation de la vitesse,
la valeur de la consigne est automatiquement corrigée de façon à ramener la vitesse à sa valeur initiale. Grâce à
la régulation, la vitesse est pratiquement insensible aux perturbations. La précision d’un régulateur est
généralement exprimée en % de la valeur nominale de grandeur à réguler.
Régulateur Moteur
Consigne de
Vitesse Comparateur Mesure de
vitesse
Image de la vitesse réelle
Décélération contrôlée : quand un moteur est mis hors tension, sa décélération est due uniquement au
couple résistant de la machine (décélération naturelle). Les démarreurs et variateurs de vitesse électroniques
permettent de contrôler la décélération au moyen d’une rampe linéaire ou en S, généralement indépendante de la
rampe d’accélération. La rampe peut être réglée de manière à obtenir un temps de passage de la vitesse en régime
établi à une vitesse intermédiaire ou nulle. Si le temps de décélération est inférieur au temps de décélération
naturelle, le moteur doit alors développer un couple résistant qui vient s’additionner au couple résistant de la
machine. Si le temps de décélération est supérieur au temps de décélération naturelle, le moteur doit développer
un couple moteur inférieur au couple résistant de la machine.
Inversion du sens de marche : elle peut être commandée à vitesse nulle après décélération sans freinage
électrique, ou avec freinage électrique pour obtenir une décélération et une inversion rapides.
Protections intégrées : les variateurs modernes assurent en général la protection thermique des moteurs et
leur propre protection. A partir de la mesure du courant, un microprocesseur calcule l’élévation de température du
moteur et fournit un signal d’alarme ou de déclenchement en cas d’échauffement excessif. Les variateurs, et
notamment les convertisseurs de fréquence, sont d’autre part fréquemment équipé de protections contre les courts
circuits entre phases ou entre une phase et la terre, les surtensions et les chutes de tension, les déséquilibres de
phases, la marche en monophasé.
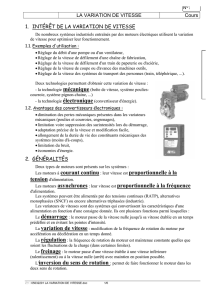
253 – Constitution :
Les démarreurs et variateurs de vitesse électroniques sont composés de 2 modules généralement regroupés dans
une même enveloppe :
Un module de contrôle qui gère le fonctionnement de l’appareil
Un module de puissance qui alimente le moteur en énergie électrique

LES CIRCUITS DE PUISSANCE ELECTRIQUE
Chapitre 9 : Démarreurs et variateurs de vitesse
électroniques
Lycée Professionnel P&M Curie – Aulnoye Aymeries
96
Réglage
Visualisation
des états
Traitement
des
informations
Mémoire
thermique
Microprocesseur
Interface de
sécurité
Relais
Interface de
puissance
Alimentation
MODULE DE CONTROLE
ORDRES
Redresseur
Convertisseur
Gradateur
Moteur
Sécurité
Retour
Retour
Allumage
MODULE DE PUISSANCE
Le module de contrôle :
Sur les variateurs et démarreurs modernes, toutes les fonctions sont commandées par un microprocesseur qui
exploite les réglages, les ordres transmis par un opérateur ou une unité de traitement, et les résultats de mesures
comme la vitesse, le courant, etc. A partir de ces informations, le microprocesseur gère l’allumage des composants
de puissance, les rampes d’accélération et de décélération, l’asservissement de vitesse, la limitation de courant,
les protections et sécurités, etc.
Les réglages des consignes (vitesse, rampes, limitation de courant, etc.) se font, suivant les produits, par
potentiomètres, claviers, à partir d’API ou de PC par l’intermédiaire d’une liaison série.
Les ordres (marche, arrêt, freinage, etc.) peuvent être donnés par des interfaces de dialogue homme/machine, des
API, des PC, etc.
Les paramètres de fonctionnement et les informations d’alarme et de défauts peuvent être visualisés sur des
voyants, des LED, des afficheurs 7 segments ou à cristaux liquides, des écrans vidéo, etc.
Des relais souvent affectables donnent des informations de :
Défaut (réseau, thermique, produit, séquence, surcharge, etc.)
Surveillance (seuil de vitesse, préalarme, fin de démarrage, etc.)
Une alimentation isolée fournit les tensions nécessaires pour l’ensemble des circuits de mesure et de
contrôle.
Le module de puissance :
Le module de puissance est principalement constitué de :
Composants de puissance : diodes, transistors, thyristors, diacs, triacs, etc.
Interfaces de tension et/ou courant
Sur les gros calibres, un ensemble de ventilation
Les composants de puissance sont des semi-conducteurs fonctionnant en TOR. Ils sont donc comparables à des
interrupteurs statiques pouvant prendre 2 états : passant ou bloqué.
Ces composants, associés dans un module de puissance, constituent le convertisseur qui alimente, à partir du
réseau à tension et fréquence fixe, un moteur électrique sous une tension et/ou fréquence variables.

LES CIRCUITS DE PUISSANCE ELECTRIQUE
Chapitre 9 : Démarreurs et variateurs de vitesse
électroniques
Lycée Professionnel P&M Curie – Aulnoye Aymeries
97
253 – Principaux modes de fonctionnement :
Unidirectionnel : un dispositif de conversion en électronique est dit unidirectionnel s’il ne laisse passer
l’énergie que dans le sens réseau récepteur. Un dispositif de freinage d’arrêt peut être exercé en courant
alternatif en connectant un dispositif distinct de freinage sur résistance qui dissipe l’énergie emmagasinée dans les
pièces en mouvement.
Réversible : un dispositif de conversion en électronique est dit réversible, ou bidirectionnel, quand il autorise le
transfert de l’énergie dans les 2 sens réseau récepteur et récepteur réseau. Un freinage peut alors être exercé
en renvoyant sur le réseau d’alimentation tout ou partie de l’énergie emmagasinée dans les pièces en mouvement.
Couple constant : le fonctionnement est dit à couple constant quand le moteur fournit le couple nominal quelle
que soit sa vitesse.
Puissance constante : le fonctionnement est dit à puissance constante quand le moteur fournit un couple
inversement proportionnel à la vitesse angulaire. C’est le cas, par exemple, pour un enrouleur/dérouleur de câble
dont la vitesse doit diminuer au fur et à mesure que croit le diamètre d’enroulement par accumulation du matériau.
Charge entraînante : une charge est dite entraînante quand elle produit une force accélératrice qui agit dans
le sens du mouvement. Par exemple, sur un engin de levage, le moteur doit développer un couple de freinage en
descente pour compenser la force accélératrice produite par la charge.
254 – Variateur – Régulateur pour moteur a courant continu a excitation séparée :
Ce type de variateur, alimenté sous une tension fixe à partir du réseau alternatif, fournit au moteur une tension
continue variable. A excitation constante, la vitesse du moteur est fonction de la tension appliquée à l’induit du
moteur.
Le circuit de puissance est un redresseur. La tension à délivre devant être variable, ce redresseur doit être du type
contrôlé ; c’est à dire comporter des composants de puissance dont la conduction peut être commandée (thyristors
ou transistors de puissance). La variation de tension de sortie est obtenue en limitant plus ou moins le temps de
conduction pendant chaque demi-période.
Plus l’amorçage du thyristor est retardé par rapport au zéro de la demi période, plus la valeur moyenne de la
tension est réduite et de ce fait, la vitesse du moteur plus faible (l’extinction d’un thyristor intervient naturellement
en fin de demi période).
La régulation consiste à maintenir avec précision la vitesse à la valeur imposée en dépit des perturbations :
variations du couple résistant, de la tension d’alimentation, de la température, etc. Toutefois, lors des accélérations
ou en cas de surcharge, l’intensité du courant ne doit pas atteindre une valeur telle que les composants soient en
danger. Un dispositif réglable abaisse le niveau de la limitation à une valeur acceptable.
La valeur de consigne désirée est fixée par un potentiomètre, par un signal transmis par liaison série ou par tout
autre dispositif qui délivre une tension image de cette vitesse désirée. La référence peut être fixe ou varier au cours
du cycle.
Des rampes d’accélération et de décélération réglables appliquent de façon progressive la tension de référence
correspondant à la vitesse désirée, l’évolution étant linéaire ou en S. Le réglage des rampes définit la durée de
l’accélération et du ralentissement.
Régulation : en boucle fermée, la vitesse réelle est mesurée en permanence par une dynamo tachymétrique ou
un générateur d’impulsions et comparée à la référence. Si un écart est constaté, l’électronique de contrôle réalise
une correction de la vitesse.
Freinage par récupération : lorsqu’un freinage rapide est désiré, il faut choisir un variateur capable de renvoyer
sur le réseau l’énergie de freinage. Celle-ci doit être convertie en courant alternatif, ce qui nécessite que, pendant
le freinage, le redresseur fonctionne en onduleur. Le variateur doit être bidirectionnel et comporter un double circuit
de puissance.
Inversion du sens de marche : elle est réalisée en inversant le sens du courant dans l’induit. La commande
d’inversion peut être statique si le variateur est bidirectionnel.

LES CIRCUITS DE PUISSANCE ELECTRIQUE
Chapitre 9 : Démarreurs et variateurs de vitesse
électroniques
Lycée Professionnel P&M Curie – Aulnoye Aymeries
98
255 – Convertisseur de fréquence pour moteur asynchrone :
Pour disposer d’un couple constant quelle que soit la vitesse, il est nécessaire de maintenir le flux constant. Ceci
nécessite que la tension et la fréquence évoluent simultanément dans les mêmes proportions.
Les convertisseurs de fréquence, alimentés à tension et fréquence fixes par le réseau, assure au moteur, en
fonction des exigences de vitesse, son alimentation en courant alternatif à tension et fréquence variables.
Le circuit de puissance est constitué d’un redresseur et d’un onduleur qui, à partir de la tension redressée, produit
une tension d’amplitude et de fréquence variables. Cet onduleur utilise 6 transistors de puissance. Le principe de
la régulation est le même que celui du variateur/régulateur à courant continu.
L’onduleur peut générer une fréquence plus élevée que celle du réseau et, de ce fait, assure au moteur un excédent
de vitesse proportionnel à cet excédent de fréquence. Toutefois, la tension de sortie du convertisseur ne pouvant
pas dépasser celle du réseau, le couple disponible décroît en proportion inverse de l’accroissement de la vitesse.
Au-dessus de sa vitesse nominale, le moteur fonctionne non plus à couple constant mais à puissance constante
(P = C).
Ce type de variateur est destiné à l’alimentation des moteurs asynchrones triphasés à cage. Il est constitué d’un
redresseur avec condensateur de filtrage, d’un onduleur à 6 transistors de puissance et d’une unité de contrôle
organisée autour d’un microprocesseur qui assure la commande de l’onduleur.
L’ondulation est obtenue par découpe de la tension redressée au moyen d’impulsions dont la durée, donc la
largeur, est modulée de telle manière que le courant alternatif soit aussi sinusoïdal que possible. Ceci conditionne
la rotation régulière à basse vitesse et limite les échauffements.
Deux rampes règlent l’accélération et le ralentissement.
Le variateur s’autoprotège et protège le moteur contre les échauffements excessifs, en se verrouillant jusqu’au
retour à une température acceptable.
Inversion du sens de marche : l’inversion du signal de commande entraîne l’inversion dans l’ordre de
fonctionnement des composants de l’onduleur, donc du sens de rotation du moteur.
Régulation : en boucle ouverte, le référence de vitesse impose une fréquence à l’onduleur, qui détermine la vitesse
théorique du moteur. Mais la vitesse réelle varie avec la charge. En boucle fermée, la vitesse réelle est contrôlée
au moyen d’un indicateur tachymétrique. La régulation assure une vitesse constante.
Freinage d’arrêt : il peut être obtenu par injection de courant redressé dans le moteur.
Freinage de ralentissement : un module de freinage réalise un ralentissement contrôlé. L’énergie de freinage est
dissipée dans une résistance branchée aux bornes du condensateur de filtrage.
LE CONTROLE VECTORIEL DE FLUX :
Les variateurs de vitesse pour moteurs asynchrones triphasés augmentent sans cesse les performances de ces
moteurs utilisés en vitesse variable.
Les applications nécessitant un bon niveau de performances d’entraînement avaient recours aux solutions avec
moteurs à courant continu. Aujourd’hui, les techniques de commande en Contrôle Vectoriel de Flux (CVF) rendent
ces applications accessibles aux moteurs asynchrones, même si le moteur à courant continu résiste dans les très
fortes puissances eu égard au coût encore élevé des variateurs.
Le CVF augmente la plage de fonctionnement des moteurs asynchrones vers les très basses vitesses. Si le moteur
est muni d’un capteur de position et d’un d’une ventilation forcée, le couple nominal peut être fourni même à l’arrêt,
le couple transitoire étant égal à 2 ou 3 fois le couple nominal suivant les moteurs. De plus, la vitesse maximale
atteint souvent le double de la vitesse nominale ou davantage si le moteur le permet mécaniquement.
256 – Gradateur de tension pour moteur asynchrone :
Un gradateur de tension alimente sous tension variable et fréquence fixe différents types de récepteurs : éclairage,
chauffage, moteurs, etc.
Quant à la commande des moteurs, le gradateur de tension est utilisé soit comme démarreur/ralentisseur
progressif, soit comme variateur de vitesse pour moteurs à cage résistante ou moteurs à bagues.
Démarreur/ralentisseur progressif :
Le gradateur de tension constitue un excellent démarreur dans tous les cas où un couple de démarrage élevé n’est
pas nécessaire (le couple est proportionnel au carré de la tension). En cas de besoin, on peut augmenter ce couple
en utilisant des moteurs comportant une cage supplémentaire pour le démarrage (moteurs à double cage).
 6
7
8
6
7
8
1
/
8
100%