Programmation des SOCs RT4/IIA4
Option : Développement embarqué 1 INSAT 2019
Travaux Pratiques
I- INTRODUCTION
Contrairement au développement d’applications pour les PCs ou un programme peut être
‘généralement’ exécuté sur n’importe quelle machine à base d’un microprocesseur compatible x86,
le développement d’une application embarqué est plus compliqué.
Rien ne garantit qu’une application fonctionnant sur une plateforme matérielle puisse
fonctionner sur une autre. D’où la nécessité d’adapter le programme :
- A la structure interne du microcontrôleur utilisé.
- Au schéma électrique de la carte à programmer (connexions entre pins du microcontrôleur
et composants externes tels que les leds les boutons poussoirs, afficheurs, etc.. .
- A la librairie de fonctions supportées par l’environnement de développement.
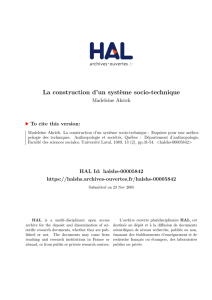
Ainsi, pour la programmation de la plateforme, il est indispensable d’utiliser principalement
3 documents conjointement :
Board Manual.pdf
Document qui décrit le
schém
a électrique de la carte
à programmer
STM32 Reference manual.pdf
Document qui décrit
l’architecture interne de la
famille des mc STM32
Firmware Library
Description des
variables et fonctions
de la librairie fournie par ST.
Déterminer les périphériques
et les ports, à utiliser en
fonction du fonctionnement
ciblé du système et du schéma
électrique.
Déterminer :
- les signaux d’horloge à
activer
- les entrées d’interruptions à
utiliser.
Déterminer :
- les structures et fonctions à
utiliser.
- Les valeurs à attribuer aux
propriétés
Programme
Fonctionnement
du système

E. DAMERGI I INSAT2019
2
II - Généralités
II-1 : Les plateformes utilisées
Au cours des séances de TPs, plusieurs cartes à base de microcontrôleurs STM32 seront
utilisées :
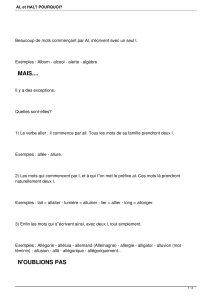
1- Les cartes NUCLEO F103 (à base de microcontrôleurs STM32F103RB) : qui possèdent des
connecteurs compatibles avec les cartes d’extension pour arduino. On trouve :
- Une LED reliée au pin PA5
- Un Bouton poussoir relié au pin PC13
- Un adaptateur de communication USB/série UART

Programmation des SOCs RT4/IIA4
Option : Développement embarqué 3 INSAT 2019
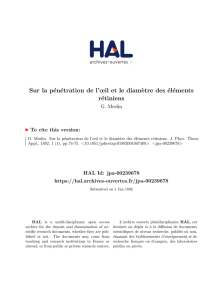
2- Les cartes Discovery (à base de microcontrôleurs STM32F100RB)
On trouve :
- 2 Leds reliées aux pins PC8 et PC9.
- Un bouton poussoir relié au pin PA0.

E. DAMERGI I INSAT2019
4
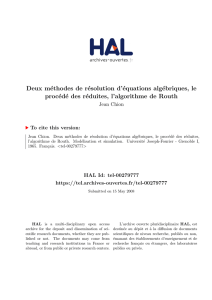
3- Les cartes Nucleo F401 (à base de microcontrôleurs STM32F401RE)
On trouve :
- 1 Led reliée aux pins PA5.
- Un bouton poussoir relié au pin PC13.
- Un adaptateur USB/Série (UART)
- Des connecteurs compatibles Arduino

Programmation des SOCs RT4/IIA4
Option : Développement embarqué 5 INSAT 2019
4- Les cartes DiscoveryF4 (à base de microcontrôleurs STM32F407VG)
On trouve :
- 4 Leds reliées aux pins PD12,13,14 et 15.
- Un bouton poussoir relié au pin PA0
- Un axeléromètre 3 axes relié au périphérique SPI.
- Un microphone.
- Un DAC 24 bits (Digital ANalog Converter) pour générer des signaux analogiques
audio.
- Un jack Audio.
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%