biomécanique de la main

BIOM
BIOMÉCANIQUE
ÉCANIQUE
DE LA MAIN
DE LA MAIN
Professeur Gilbert VERSIER
Professeur Gilbert VERSIER
Service de chirurgie orthopédique
Service de chirurgie orthopédique
HIA BEGIN
HIA BEGIN
94160 SAINT-MANDE
94160 SAINT-MANDE
L’iconographie est notamment issue des ouvrages de Mr Netter et Kapandji

Définition
Définition
•
•Main = organe effecteur du membre supérieur
Main = organe effecteur du membre supérieur
•
•Outil complexe
Outil complexe
•
•2 fonctions principales de très grande précision
2 fonctions principales de très grande précision
–
–La préhension
La préhension
•
•Évolution phylogénétique
Évolution phylogénétique
•
•Possibilité d
Possibilité d’
’opposition du pouce
opposition du pouce
–
–Le tact
Le tact
•
•Sensibilité tactile avec reconnaissance du relief, taille et
Sensibilité tactile avec reconnaissance du relief, taille et
distance de 2 reliefs, consistance et température
distance de 2 reliefs, consistance et température
•
•Rétro contrôle cérébral des gestes fins ou des gestes en force
Rétro contrôle cérébral des gestes fins ou des gestes en force

Définition
Définition
•
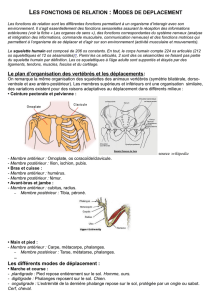
• organisation du membre supérieur
organisation du membre supérieur
–
– Un système directeur à 7 degrés de liberté
Un système directeur à 7 degrés de liberté
•
•Epaule 3
Epaule 3
•
•Coude 1
Coude 1
•
•Avant-bras 1
Avant-bras 1
•
•Poignet 2
Poignet 2
–
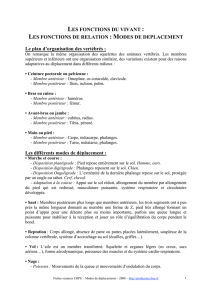
–Un système effecteur terminal: la main à 23 degrés
Un système effecteur terminal: la main à 23 degrés

23 degrés de liberté
23 degrés de liberté

•
•Plan
Plan
–
– Le métacarpe
Le métacarpe
–
– La chaîne digitale
La chaîne digitale
–
– La chaîne du pouce
La chaîne du pouce
–
– Les fonctions de la main
Les fonctions de la main
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
1
/
66
100%