Compétences attendues C42

Spécialité Energie et Environnement
Fiche de cours
CARACTERISTIQUES MECANIQUES D’UNE
CHAINE D’ENERGIE
Caractéristiques mécaniques d’une chaine d’énergie Page 1
sortie
entrée P
P
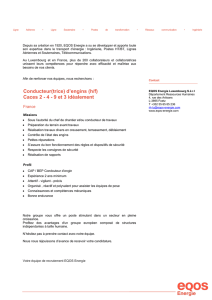
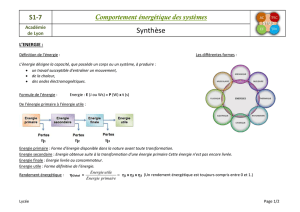
1. Constitution d’une chaîne d’énergie :
Pré-actionneur
(variateur)
Moteur
Réduction
de vitesse
Transformation
de mouvement
Réseau
électrique
Pour étudier les contraintes ou l’efficacité énergétique d’une chaine d’énergie nous aurons besoin
des caractéristiques des éléments de la chaîne d’énergie :
Rapport de réduction de la réduction de vitesse
Rendement de la réduction de vitesse
Caractéristiques de la transmission de mouvement (diamètre du treuil, pas de la vis sans fin…)
Rendement de la transformation de mouvement
Masse de la charge à déplacer
Vitesse de la charge à déplacer
2. Formules de base pour les calculs de vitesse et de puissance :
La vitesse du rotor peut-être exprimée par N en tr/mn ou en vitesse angulaire en rad/s :
60
2N
(On rappelle que 1 tour correspond à 2rad).
Rendement d’un élément :
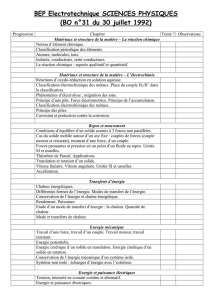
Couple / puissance / vitesse sur un axe en rotation :
Le couple d'un moteur est une mesure de l'effort tournant qu'il développe. Il est égal au
produit de l'effort (F) par le rayon d'action (R).
C = F x R
C : couple sur l'arbre moteur en Newton-Mètre (Nm)
F : force en Newton (N)
R : rayon en Mètre (m)
P
C
P : Puissance en W / C : Couple en Nm / Ω : Vitesse de l’axe en rd/s
Puissance
d’entrée
Puissance
de sortie
R
F
n

Spécialité Energie et Environnement
Fiche de cours
CARACTERISTIQUES MECANIQUES D’UNE
CHAINE D’ENERGIE
Caractéristiques mécaniques d’une chaine d’énergie Page 2
3. Travail à fournir pour soulever une charge :
3.1. Formulaire :
2 solutions pour les applications de levage en fonction des données
Force liée au poids de la charge
gMF
Puissance nécessaire pour soulever la
charge
VFP
F : Force en N / g : Accélération de la pesanteur (9,81 ou 10) / h : hauteur de levage en m
M : Masse en Kg / W : Travail à fournir en Joules / Puissance en W
V : Vitesse de levage en m/s / t : durée du mouvement en secondes
3.2. Exercices :
Soit un treuil de levage conçu pour soulever une charge de 450 kg de 16 m en 8 secondes
à une vitesse de 2 m/s. Calculer la puissance à fournir en utilisant les deux manières indiquées
ci-dessus.
NgMF 450010450
WVFP 900024500
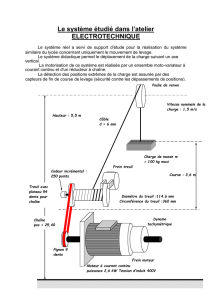
Un moteur électrique entraine une charge de 100kg par l’intermédiaire d’une poulie de diamètre
10 cm. La vitesse nominale du moteur est de 1480 tr/mn.
Calculer la puissance utile développée par le moteur pour entrainer cette charge à sa vitesse
nominale.
Travail (Energie pour déplacer la
charge)
hgMW
Puissance nécessaire pour
soulever la charge :
t
W
P
OU
W
t
W
P
jouleshgMW
9000
8
72000
720001610450
WCP
srad
n
NmRgMRFC
759498.15449
/98.154
6014802
60
2
4905.081.9100

Spécialité Energie et Environnement
Fiche de cours
CARACTERISTIQUES MECANIQUES D’UNE
CHAINE D’ENERGIE
Caractéristiques mécaniques d’une chaine d’énergie Page 3
Charge
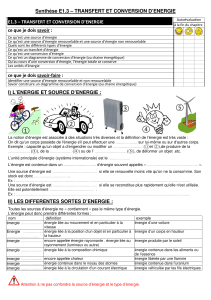
4. Transformation de mouvement :
4.1. Principe général :
L’objectif est d’assurer un passage d’un mouvement de rotation à un mouvement de translation.
Rendement
Caractéristiques de transformation de mouvement
4.2. Modes de transformation de mouvement :
Transmission par treuil ou par poulie /courroie
Caractéristiques :
Rendement du système de transmission
Rayon du treuil ou des poulies
Formules
12 PPrV
V en m/s / Ω en rd/s / r en m
P1 et P2 en W
Transmission par vis sans fin
Caractéristiques :
Rendement
Pas de la vis sans fin
Formules
12 PPNpasV
V en mm/s / N en tr/s / pas en mm/t
P1 et P2 en W
4.3. Exercices :
Soit un système de levage doit fournir une puissance de 5,2 KW pour soulever une charge
à une vitesse de 0,5 m/s. Le tambour de son treuil à un diamètre de 14 cm. Le rendement du
treuil est de 85%. Calculer la puissance à fournir sur son axe de rotation et la vitesse de
rotation de l’axe en tr/min.
KW
P
Psrd
r
V11,6
85,0 2,5
/14,7
07,0 5,0 2
1
Puissance entrée :
P1 en W
Vitesse de rotation de
l’axe : Ω en rd/s
Puissance de sortie :
P2 en W
Vitesse de translation
de la charge: V en m/s
V
V
r
r
Ω
Ω
V
N

Spécialité Energie et Environnement
Fiche de cours
CARACTERISTIQUES MECANIQUES D’UNE
CHAINE D’ENERGIE
Caractéristiques mécaniques d’une chaine d’énergie Page 4
Soit un système de levage doit fournir une puissance de 1,7 KW pour soulever une charge à une
vitesse de 0,7 m/s. Le levage s’effectue par un système écrou vis sans fin de pas 15 mm. Le
rendement du système de transmission est de 100%. Calculer la puissance à fournir sur son axe
de rotation et la vitesse de rotation de la vis en rd/s.
srdNstr
pas
V
N/2936,4622/6,46
15
700
P1 = P2 car = 100 % P1 = 1,7 KW
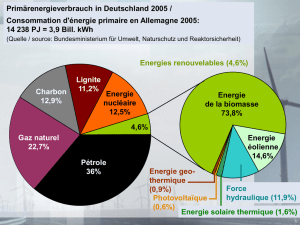
5. Réduction de vitesse :
5.1. Principe général :
Un réducteur est caractérisé par son rendement et son rapport de réduction.
Un réducteur réduit la vitesse du moteur N1>N2 ou Ω1>Ω2
Le rapport de réduction ne modifie pas la puissance, ce sont les pertes dans le réducteur
qui font que P1 > P2 ( < 1)
Un réducteur augmente le couple fourni par le moteur C2 > C1
Les pertes dans le réducteur sont à l’origine d’un couple de frottement.
Le couple en sortie C2 dépend de :
Du rapport de réduction du réducteur
Du rendement du réducteur
P1
C1
Ω1
N1
P2
C2
Ω2
N2

Spécialité Energie et Environnement
Fiche de cours
CARACTERISTIQUES MECANIQUES D’UNE
CHAINE D’ENERGIE
Caractéristiques mécaniques d’une chaine d’énergie Page 5
Réducteur (type indifférent)
Caractéristiques :
Rendement
Rapport de réduction K
Formules
12
2
1
2
1
21
21
PP K
K
N
N
K
NKN
N1 et N2 en tr/s ou tr/min Ω1 et Ω2 en rd/s
P1 et P2 en W C1 et C2 en Nm
Détermination C1 en fonction de C2, , K (K sous la forme 1/10 par exemple)
KCKP
C
P
C
P
P
K
2
1
1
2
1
2
2
1
12
1
Pour les toutes les applications étudiées :
N1>N2 / C1<C2
5.2. Mode de réduction de vitesse :
Réduction par poulie courroie
1 > 2 et C1 < C2
2
1
2
2
1
2
1 Z
Z
D
D
Réduction par engrenages
1 > 2 et C1 < C2
2
1
2
2
1
2
1 Z
Z
D
D
Réduction par roue/vis sans fin
1 > 2 et C1 < C2
2
1
2
2
1
2
1 Z
Z
D
D
N2
C2
N1
(moteur)
C1
Rapport de
réduction
K est donné sous la
forme
K=10 par exemple
K est donné
sous la forme
K=1/10 par
exemple
D1
D2
1
(moteur)
2
D1
Z1
D2
Z2
1 (moteur)
2
Z1
Z2
2
1
(moteur)
 6
7
8
6
7
8
1
/
8
100%