Le système étudié dans l`atelier ELECTROTECHNIQUE

Le système étudié dans l’atelier
ELECTROTECHNIQUE
Le système réel a servi de support d’étude pour la réalisation du système
similaire du lycée concernant uniquement le mouvement de levage.
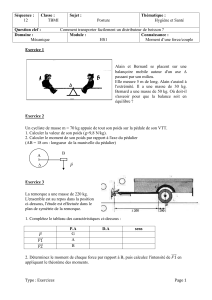
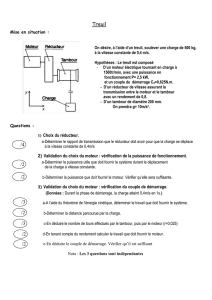
Le système didactique permet le déplacement de la charge suivant un axe
vertical.
La motorisation de ce système est réalisée par un ensemble moto-variateur à
courant continu et d'un réducteur à chaîne.
La détection des positions extrêmes de la charge est assurée par des
capteurs de fin de course de levage (sécurité contre les dépassements de positions).
Poulie de renvoi
Câble
d = 6 mm
Pignon 9
dents
Moteur à courant continu
puissance 2,6 kW Tension d’induit 400V
Dynamo
tachymètrique
Hauteur : 5,5 m
Course : 3,6 m
Charge de masse m
= 100 kg maxi
Frein treuil
Diamètre du treuil :114.6 mm
Circonférence du treuil :360 mm
Frein moteur
Treuil avec
plateau 54
dents pour
chaîne
Chaîne
pas = 25,40
Codeur incrémental :
250 points
Vitesse nominale de la
charge : 1,5 m/s

PUPITRE de COMMANDE
STRUCTURE GENERALE
DEPLACER une CHARGE
MOTORISATION et TREUIL

Caractéristiques du système didactique : ACTIONNEURS et CAPTEURS
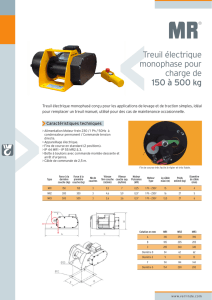
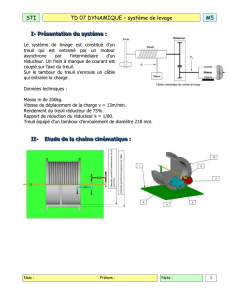
Représentation de la chaîne cinématique :
Etude mécanique du couple résistant et du couple moteur :
La charge exerce une force F (N) qui est le produit de la masse M (kg) par
l’accélération due à l’attraction terrestre g (9,81).
F = M . g
CHARGE
TREUIL
+
POULIE DE
RENVOI
+
CABLE
REDUCTEUR
A CHAINE
MOTEUR
Cr
F
Cm
V
t
m
Machine à courant continu
Réf : 1 GA5 114 OBC 16 6 J F7 Z
Induit
V
Tr/mn
A
kW
400 V
(105 – 400 V)
1790
(310 –1560)
7,8
2,6
(0,5 – 2,6)
Excitation
V
A
180
115
0,73
0,485
IEC : 112 IP23
IM : B35
Frein moteur
Marque : BINDER à manque de courant
Type : 76 147 – 16 E 0 A
Alimentation : 98 v alternatif – 0,56 A / 88 VA
Dynamo tachymétrique
Marque : Radio - Energie
Réf : RED 444 R1C / CA
0,06 V/tr/mn 0,16 A IP54
Nmax : 5000 tr/mn
Codeur incrémental
Réf : IVO GI 355
250 points / tours 12 Vcc
Sortie à collecteur ouvert (NPN)
Frein treuil
SIME industrie
Mod : 650 n 1889 50 V continu

Appliquée sur le treuil par l’intermédiaire du câble cette force provoque un
couple résistant Cr (Nm) qui est le produit de la force F (N) par le rayon du
treuil r (m).
Cr = F . r
Ce couple résistant Cr (Nm) est retransmis au moteur Cm (Nm) à travers le
réducteur dont le rapport de réduction m
m = zp / zt
zp : nombre de dents du pignon solidaire de l’arbre
moteur
zt : nombre de dents de la couronne du treuil
Ce réducteur mécanique a un rendement
Cm
mCr
η
Etude mécanique de la vitesse de la charge et du moteur :
Le cahier des charges impose une vitesse linéaire V (m/s), ce qui impose au
treuil une vitesse angulaire t (rad/s) inversement proportionnelle au rayon r
du treuil.
r
V
Ωt
La vitesse de rotation du treuil nt est généralement exprimée en tr/mn, il est
donc nécessaire d’effectuer un changement d’unité.
60
2π
Ωt
nt
Le rôle du réducteur est d’adapter la vitesse du moteur nm à celle
nécessaire sur le treuil le rapport de réduction m permet cette adaptation.
nm = nt / m
Etude mécanique de la puissance du moteur :
La puissance d’un élément moteur (W) est le produit du couple exercé (Nm)
par la vitesse angulaire (rad/s).
P = Cm . m
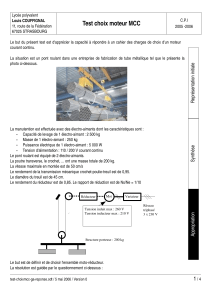
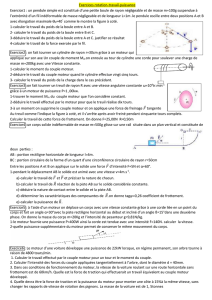
Analyse fonctionnelle du système de levage didactique

Compte - rendu
E
Courant maxi, accélération …
Système de levage
CHARGE
CHARGE
DEPLACEE
DEPLACER une charge
verticalement avec une sécurité
maximale pour les personnes et un
minimum d’énergie
A0
Réseau 3 x 400 V
W
C
Arrêt d’urgence
R
Consigne vitesse
potentiomètre
Combinateur
automate
Energie récupérée
1
/
5
100%