Aire motrice primaire - Master Physique

Motricité: plan du cours
•Introduction : organisation générale de la motricité
•1. Sélection et localisation de la cible du mouvement
–Transformations visuo-motrice
–Intrégration multi-sensorielle
•2. Planification du mouvement
–Codage directionnel du mouvement
–Contribution respective des aires prémotrice et motrice primaire
•3. Contrôle de l ’exécution du mouvement
–représentations motrices corticales
–Voie motrices descendantes
–boucles cortico-striatales
–boucles cortico-cérebelleuses
•4. Interfaces cerveau-machine

Motricité: plan du cours
•Introduction : organisation générale de la motricité
•1. Sélection et localisation de la cible du mouvement
–Transformations visuo-motrice
–Intrégration multi-sensorielle
•2. Planification du mouvement
–Codage directionnel du mouvement
–Contribution respective des aires prémotrice et motrice primaire
•3. Contrôle de l ’exécution du mouvement
–représentations motrices corticales
–Voie motrices descendantes
–boucles cortico-striatales
–boucles cortico-cérebelleuses
•4. Interfaces cerveau-machine

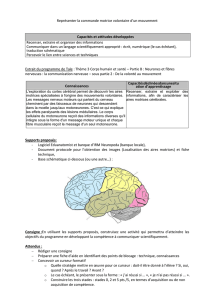
•La motricité permet à chacun d’agir dans son environnement
•La motricité peut être envisagée comme la dernière étape
d’une chaine de processus cérébraux complexes:
–Perception: Utilise les informations sensorielles pour construire une
représentation interne de l’environnement.
Frédéric Chavane: Vision
–Cognition: Intègre et interprète les informations perceptives en
fonction de l’expérience passée, de l’ état émotionnel et attentionnel,
et sélectionne les actions appropriées au contexte.
Thierry Chaminade: Cognition
–Action: Prépare et exécute les mouvements correspondants aux buts
de l’organisme.
Grandes fonctions cérébrales

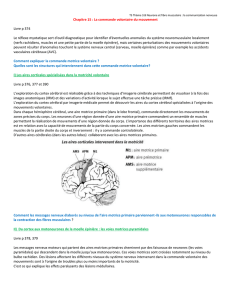
Motricité et Interfaces cerveau-machine
ROBOTIQUE
PHYSIQUE STIMULATION
Centrale ou périphérique
ENREGISTREMENT
Central ou périphérique
Cognition
intention
attention
émotion

Contrôle du mouvement: problématique
La compréhension des mécanismes de contrôle du mouvement peut
se résumer en trois questions:
•Comment le but de l’action est il représenté ?
•Comment le mouvement est il planifié ?
•Comment le mouvement est il exécuté ?
Cette formulation rejoint celle des modèles théoriques de contrôle en
ingénierie et robotique dans lesquelles on distingue différents
niveaux hiérarchiques.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
1
/
74
100%