Les actionneurs d`un système automatisé fournissent aux effecteurs

1/8
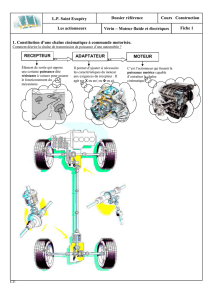
1. INTRODUCTION :
Les actionneurs d’un système
automatisé fournissent aux
effecteurs l’énergie utile pour
apporter une valeur ajoutée à la
matière d’œuvre. Ils sont les
éléments « moteur » de chacune des
chaînes d’action des systèmes
automatisés.
Place des actionneurs dans la structure
d’un système automatisé
M.O.E.
M.O.S.
Gérer
l'énergie
de puissance
Préactionneurs
Communiquer avec l'opérateur
Pupitre
Traiter
les informations
Partie Commande
Convertir
l'énergie
en action
Traiter le produit
Actionneurs
Effecteurs
Capteurs
Acquérir
les informations
ACTIONNEUR :
Le rôle d’un actionneur est de
convertir une énergie d’entrée en
une énergie de sortie utilisable pour
obtenir une action définie.
CONVERTIR
L'ENERGIE EN ACTION
Energie non
directement
utilisable
Energie
utilisable
(mécanique
en général)
Actionneur
Présence
énergie
Pertes
2. LES ENERGIES :
L’énergie d’entrée est le plus souvent de
type :
électrique
pneumatique
hydraulique
L’énergie de sortie est en général de type :
mécanique
mais peut être aussi :
thermique
lumineuse
sonore
Elles peuvent être exprimées en fonction de grandeurs physiques mesurables :
tension électrique mesurée en volt (V),
intensité du courant mesurée en ampère (A),
pression mesurée en pascal (Pa),
débit mesuré en mètre cube par seconde (m3.s-1),
force mesurée en newton (N),
vitesse mesurée en mètre par seconde (m.s-1),
vitesse angulaire mesurée en radian par seconde (rad.s-1).
SYNTHESE SI seconde : ACTIONNEURS

2/8
Remarque :
Certaines grandeurs physiques sont encore aujourd’hui mesurées dans des unités
n’appartenant pas au Système International (S.I.), et/ou avec des multiples ou des sous-
multiples des unités du S.I.. Il est impératif dans ce cas de convertir les mesures en unités du
S.I.
Exemple :
la pression est mesurée en bar (daN/cm2),
la fréquence de rotation mesurée en tours/min,
les forces mesurées en daN
3. QUELQUES ACTIONNEURS DU PALETTISEUR DE SACS D’ENGRAIS :
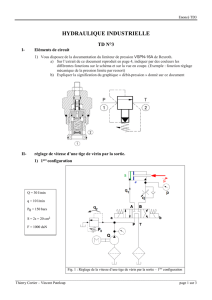
3.1. LES MINI VERINS PNEUMATIQUES A DOUBLE EFFET :
Tâche orienter le sac :
Les sacs sont orientés par basculement au
fur et à mesure de leur arrivée sur le tapis
transfert suivant la position du déflecteur.
Le système d’orientation nécessite la mise
en œuvre d’une énergie mécanique de
translation.
Orienteur
Tapis
Un vérin permet de convertir l’énergie pneumatique (air comprimé 6.106
Pa) fournie par un compresseur, afin de produire l’énergie mécanique de
translation.
Ce vérin est appelé vérin pneumatique double effet.
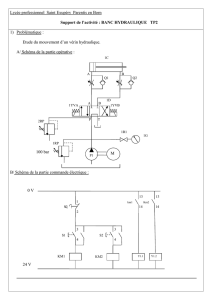
3.2. LE MOTEUR ELECTRIQUE ASYNCHRONE MONOPHASE :
Tâche de transfert des sacs :
Les sacs sont transférés sur le système par
une bande transporteuse.
L’entraînement de la bande autour des
poulies nécessite la mise en œuvre d’un
mouvement de rotation.
Bande transporteuse
Poulie motrice
Sens
du défilement
Moteur électrique
Un moteur électrique permet de convertir l’énergie électrique (220 V)
fournie par le réseau E.D.F. afin de produire l’énergie mécanique de
rotation.
Ce moteur est appelé moteur asynchrone monophasé.

3/8
4. LES CARACTERISTIQUES FONCTIONNELLES D’UN ACTIONNEUR :
4.1. LES VERINS PNEUMATIQUES LINEAIRES :
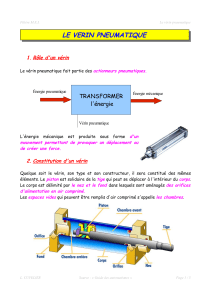
4.1.1. Rôle d’un vérin :
Le vérin le plus fréquemment
utilisé est le vérin pneumatique
linéaire. Associé à un
préactionneur, il engendre en
grandeur de sortie de l’énergie
mécanique de translation rectiligne.
CONVERTIR
L'ENERGIE PNEUMATIQUE
Energie
pneumatique
(pression p, débit q)
Energie
mécanique
(effort F, vitesse V)
Vérin
pneumatque
Présence
énergie
pneumatique
Pertes
4.1.2. Les 2 types de vérin linéaire :
Vérin à simple effet (symbole N.F.)
Vérin à double effet (symbole N.F.)
Dans un vérin à simple effet, la
pression est injectée d’un seul coté
d’un piston, le retour en position
initiale s’effectue sous l’action d’un
ressort.
Dans un vérin à double effet, la
pression est injectée alternativement
de part et d’autre d’un piston, selon
le sens de déplacement désiré.
Choix d’un type de vérin :
Les vérins à simple effet sont utilisés lorsqu’il est nécessaire de produire un travail dans un
seul sens alors que les vérins à double effet sont utilisés lorsqu’il est nécessaire de produire un
travail dans les deux sens.
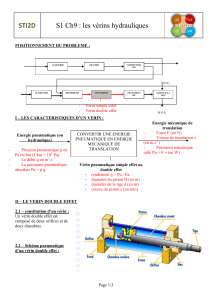
4.1.3. Architecture d’un vérin double effet :
Un vérin pneumatique est constitué d’un cylindre (le fût) obturé à ses deux extrémités dans
lequel coulisse un piston sur lequel est fixée une tige métallique qui transmet l’énergie
mécanique engendrée par la pression. Pour un vérin à double effet, deux orifices
d’alimentation en air comprimé sont usinés de part et d’autre du piston. Pour provoquer la
sortie de la tige, il faut distribuer la pression dans la chambre arrière et mettre la chambre
avant à l’échappement. Des joints assurent l’étanchéité entre les deux chambres (étanchéité
dynamique) entre l’extérieur et les chambres arrière et avant (étanchéité statique).

4/8
Eléments constitutifs d’un vérin pneumatique à double effet
12 3 4 5 6 7 8 9 10 11
A
B
ab
a : Orifice d’alimentation de la chambre arrière A
b : Orifice d’alimentation de la chambre avant B
1. Fond de vérin
2. Joint de fût
3. Joint de piston
4. Bague porteuse
5. Piston
6. Fût (cylindre)
7. Tige
8. Joint de fût
9. Nez de vérin
10. Bague de palier
11. Joint de palier
4.1.4. Caractéristiques fonctionnelles :
le diamètre du piston noté Ø (Phi) ou D, exprimé en mm,
la course du piston noté L, exprimée en mm,
la pression d’alimentation du vérin noté p, exprimé en pascal (Pa), (1
Pa = 1 N.m2) ou en bar (b), (1 bar = 1 daN.cm2).
4.1.5. Performances d’un vérin pneumatique :
Le choix et le dimensionnement d’un vérin pneumatique sont réalisés en
fonction de l’effort axial à transmettre et à la vitesse à laquelle doit être
transmis cet effort. La valeur théorique de l’effort axial F transmis par la
tige d’un vérin linéaire est donné par la relation :
F=p.S
S est la surface soumise à la pression exprimée en cm2,
p est la pression d’alimentation en air comprimé exprimée en bar,
l’effort axial F est exprimé en daN.
Remarque :
Pour un vérin double effet, la surface d’application de l’air comprimé est différente entre la
face avant et la face arrière du piston, l’effort transmissible en mouvement sortant est donc
supérieur à l’effort transmissible en mouvement sortant.

5/8
4.1.6. Domaines d’application :
Les vérins pneumatiques sont utilisés dans tous les systèmes automatisés qui nécessitent des
mouvements linéaires rapides pour transférer, élever, indexer, brider, fermer, arrêter,
assembler, marquer…
4.1.7. Application :
Hypothèses :
On néglige les frottements ainsi que la masse du piston et de la tige.
Données :
Ø du piston = 20 mm
Ø de la tige = 8 mm
p = 6 bars
m = 12 Kg
P = m.g
P est le poids en N
m est la masse en Kg
g est l’accélération de la pesanteur
g 10 m.s-2
Vérifier si le choix du vérin est compatible avec
l’effort à fournir pour élever la masse.
SPiston = .102 = 314 mm2 = 3,14 cm2
F = 6 3,14 = 18,84 daN = 188,4 N
P = m.g = 12 10=120 N
F – P = + 68.4 N
4.2. LES MOTEURS ASYNCHRONES :
Le moteur asynchrone qui utilise le courant
alternatif fourni par le réseau triphasé est
l’actionneur électrique le plus utilisé dans les
systèmes automatisés industriels.
Symbole N.F.
M
3
4.2.1. Rôle d’un moteur asynchrone :
Un moteur asynchrone est un
actionneur qui transforme une
énergie électrique (courant
alternatif 220V ou 380V) en une
énergie mécanique de rotation.
CONVERTIR
L'ENERGIE ELECTRIQUE
Energie
électrique
(courant alternatif
tension U, intensité i)
Energie
mécanique
(Couple C, vitesse
angulaire de rotation)
Moteur
asynchrone
Présence
énergie
électrique
Pertes
4.2.2. Constitution et principe de fonctionnement :
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%