rotation - polygones réguliers – composition de symétries centrales

G6 : ROTATION - POLYGONES
RÉGULIERS – COMPOSITION DE
SYMÉTRIES CENTRALES
I- Rotation
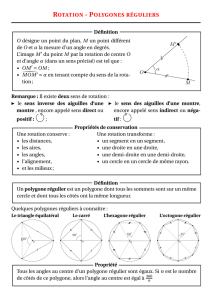
1. Définition
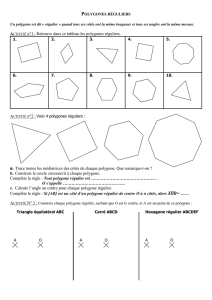
Une rotation est définie par un centre, un
angle et un sens de rotation.
Le sens direct est sous-entendu. C’est le
sens inverse des aiguilles d’une montre.
La figure F’ est l’image de
la figure F par la rotation
de centre O, d’angle 90°
dans le sens des aiguilles
d’une montre.
2. Images de figures simples par rotation
L’image d’un point, d’une droite, d’une
demi-droite et d’un segment est
respectivement un point, une droite, une
demi-droite et un segment.
L’image d’un cercle par une rotation est
un cercle de même rayon.
F
F’
O

3. Propriété
Une rotation conserve les longueurs, les
angles, les milieux, l’alignement,
l’orthogonalité et la parallélisme.
II- Polygones réguliers
1. Définition
Un polygone régulier a ses côtés de même
longueur et ses angles de même mesure. Il
est inscriptible dans un cercle.
2. Polygones invariant par rotation
En faisant "tourner" un polygone
régulier autour de son centre, selon
certains angles, on "retombe" sur le
même dessin du polygone régulier.
On dit alors que le polygone régulier est
invariant par la rotation appliquée.

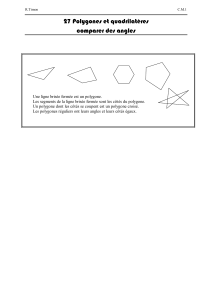
3. Polygones caractéristiques
critères
triangle
équilatéral
carré
hexagone
régulier
angle au
centre
120°
90°
60°
nombre
d’axes de
symétrie
3
4
6
centre de
symétrie
0
1
1
invariant
par
rotation de
centre O
et
d’angle…
120° ou
240° ou
etc.
90° ou
180° ou
270° ou
etc.
60° ou
120° ou
180° ou
240° ou
etc.
figure

III- Composition de deux transformations
1. Définition
On appelle composée de deux
transformations successives, la
transformation qui permet de passer de la
figure de départ à celle d’arrivée.
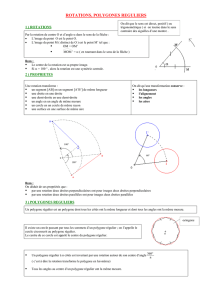
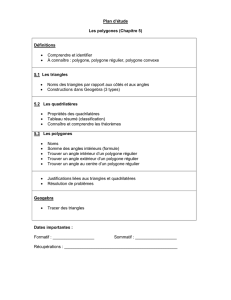
2. Composée de deux translations
La composée de deux translations
successives de vecteurs
u
et
v
est une
translation de vecteur
u
+
v
.
u
+
v
F
F’’
F’
u
v
F

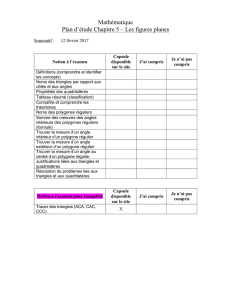
3. Composée de deux symétries centrales
La composée de 2 symétries
centrales est une translation de
vecteur double de celui défini par les
2 centres de symétrie pris dans
l’ordre.
Si les centres sont O et P pris dans
cet ordre, alors la composée de ces 2
symétries centrales est une
translation de vecteur
u
=
2OP
.
u
F ’’
F ’
O
P
F
1
/
5
100%