TD4

Universit´e Pierre et Marie Curie
LICENCE DE SCIENCES ET TECHNOLOGIES
LP 112A
Ann´ee universitaire 2011-2012
Travaux Dirig´es de Physique N◦4
FORCES CENTRALES. LOIS DE KEPLER.
1 Satellite Lunaire.
On ´etudie le mouvement d’un satellite soumis au seul champ de gravitation de la Lune, dans le
r´ef´erentiel li´e au centre Ode la Lune. On admettra que ce r´ef´erentiel est galil´een. Le rayon de la Lune
est R= 1700 km et on sait, que l’acc´el´eration de la pesanteur `a la sur[ace de la Lune gLest 6 fois
plus faible que sur la Terre. (On prendra g= 10 m.s−2comme valeur de l’acc´el´eration de la pesanteur
terrestre.)
Le satellite sera dit inerte lorsqu’on ne fait pas fonctionner les fus´ees de bord et que sa masse m
reste constante.
1. On suppose ici que le satellite est inerte.
(a) Quelle est la nature de sa trajectoire ? (1´ere loi de Kepler.)
(b) Rappeler pourquoi le vecteur ~c =~r ∧~v (o`u ~r =~
OM est le rayon vecteur du satellite et ~v
sa vitesse) est une constante du mouvement.
(c) Quelle autre grandeur fondamentale reste constante au cours du mouvement ? Exprimer
cette constante en fonction de la constante de gravitation G, de la masse Mde la Lune, de
m, de ret de v(normes de ~r et ~v).
2. Changement d’orbite.
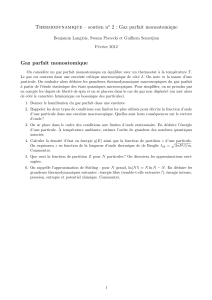
Le satellite est plac´e initialement sur une orbite circulaire C1(Cf Fig. 1) de rayon r1= 3000 km.
On veut l’amener sur une autre orbite circulaire rasante C2(r2∼R), dans le mˆeme plan que
l’orbite C1.
Figure 1 – Orbites lunaires
(a) Le satellite ´etant inerte, rappeler pourquoi sa vitesse est uniforme sur une orbite circulaire.
Calculer les vitesses v1et v2sur les orbites C1et C2. En donner les valeurs num´eriques.
1

(b) En un point M1de C1, on provoque au moyen des fus´ees de bord et sur une distance tr`es
faible par rapport `a la taille de l’orbite, un changement de vitesse ∆v1=v0
1−v1, sans
modification de direction ( ~v1
0// ~v1), de fa¸con que le satellite d´ecrive une orbite elliptique C0
de foyer Oet de grand axe M1M2(voir Fig. 1). Le satellite arrive en M2avec une vitesse v0
2
et un nouveau changement de vitesse ∆v2=v2−v0
2en ce point l’am`ene `a d´ecrire l’orbite
C2. En ´ecrivant que sur l’orbite elliptique C0, entre M1et M2, l’´energie et la norme cdu
vecteur ~c sont conserv´ees, calculer v0
1et v0
2. En d´eduire ∆v1et ∆v2en pr´ecisant leur signe,
c’est `a dire s’il s’agit d’une acc´el´eration ou d’un freinage.
(c) En M1et M2, la masse du satellite peut diminuer sensiblement par consommation du
combustible. Le calcul de ∆v1et ∆v2doit-il ˆetre modifi´e pour en tenir compte ?
2 La com`ete de Halley
Connue depuis l’antiquit´e, la com`ete de Halley a une trajectoire elliptique autour du soleil avec une
excentricit´e proche de 1.
Figure 2 – La com`ete de Halley (sonde Giotto).
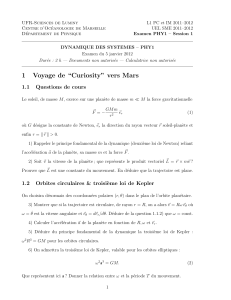
Son long voyage l’emm`ene jusqu’`a l’extr´emit´e du syst´eme solaire, au-del`a de Neptune `a l’aph´elie (A),
puis au retour elle revient pr`es du Soleil, au p´erih´elie (P), avec un rayon rpinf´erieur `a la distance
Terre-Soleil (RT S ).
Figure 3 – Sch´ema du syst´eme solaire montrant la trajectoire de la com`ete de Halley.
On se donne deux valeurs num´eriques seulement sur l’orbite de Halley :
– sa p´eriode : T= 75,6 ans ≈76 ans
– son rayon au p´erih´elie : rp= 0,59RT S ≈0,6RT S .
2

Le but du probl`eme est de calculer les autres grandeurs pertinentes : le grand axe de l’ellipse, son
son exentricit´e, les vitesses aux points extr´emaux, le moment cin´etique et enfin, l’´energie m´ecanique
de la com`ete. On n´eligera bien sˆur l’influence des plan`etes et on ne consid´erera que l’interaction
Soleil-com`ete.
La gravitation Newtonienne donne toutes les caract´eristique d’une orbite c´eleste, y compris les lois de
Kepler. En particulier, on rappelle la forme polaire d’une trajectoire elliptique dont le foyer est plac´e
au centre Odu Soleil (voir Fig. 4) :
r=p
1 + ecos(θ)
avec el’exentricit´e, et
p=L2
O
GMm2=L2
O
km
o`u on a introduit la constante k=GMm ;Gest la constante de gravitation, Mla masse du Soleil, m
la masse de la com`ete et LOle moment cin´etique de la com`ete par rapport `a O.
Figure 4 – G´eom´etrie de l’orbite.
On rappelle quelques valeurs num´erique approch´ees :
–G= 6,7.10−11 m3kg−1s−2,
–RT S = 150 millions de km soit 1,5.1011 m,
–M= 2.1030 kg.
Afin de faciliter l’analyse num´erique des probl`emes, on remarquera que ces grandeurs sont reli´ees par
la p´eriode T0et par la vitesse v0de la Terre sur son orbite circulaire :
T0= 2πqR3
T S
GM ≈365 jours v0=qGM
RT S ≈30 km.s−1
1. Ecrire l’expression de la force gravitationnelle ~
Fexerc´ee par le Soleil sur la com`ete plac´ee en M,
en coordonn´ees polaire de la figure 4. Introduire la constante kdans votre expression.
2. Qu’est-ce qui indique dans l’expression que la force est attractive ?
3. Calculer le moment ~
MOde la force par rapport `a O.
3

4. D´emontrer que le moment cin´etique de la com`ete par rapport `a Oest constant au cours du
mouvement. Quelle est sa direction par rapport au plan de l’orbite ?
5. Estimer la valeur num´erique du demi-grand axe aen utilisant la troisi´eme loi de Kepler :
T= 2πrma3
k
Astuce de calcul : exprimer tout d’abord le rapport T/T0. On donne : 3
√5,8≈1,8.
6. En d´eduire directement le rayon rA`a l’aph´elie. Le comparer au rayon de l’orbite de Neptune
(environ 30 RT S ).
7. A partir de l’´equation polaire de la trajectoire, exprimer rA,rPpuis leur rapport rA/rP, en
fonction de l’excentricit´e e.
8. En d´eduire une valeur num´erique approch´ee pour e.
9. Quelle serait la trajectoire (hypoth´etique) de la com`ete si on avait e= 1 ?
10. Exprimer le moment cin´etique ~
LOau point (P) (Cf Fig. 4). En d´eduire une expression pour la
vitesse vPau p´erih´elie en fonction de e,rP,ket mseulement.
11. Estimer la valeur num´erique de vP. Astuce de calcul : exprimer tout d’abord le rapport vP/v0.
On donne : 1/√0,3≈1,8.
12. Donner la valeur de la vitesse vA`a l’aph´elie. La comparer `a la vitesse orbitale de Neptune
(environ 5,4 km.s−1)
13. A l’aide de la r´eponse `a la question 10. ci-dessus, exprimer l’´energie cin´etique Ecau p´erih´elie en
fonction de e,rPet k.
14. Exprimer de mˆeme l’´energie potentielle Ep(dans la convention o`u elle est nulle `a l’infini).
15. En d´eduire que l’´energie m´ecanique, Em, n’est fonction que du grand axe et vaut
Em=−k
2a
3 Orbite de Mercure.
3.1 Grandeurs caract´eristiques.
Dans cette partie, on va utiliser les r´esultats du probl`eme pr´ec´edent sur la com`ete de Halley afin
de calculer les grandeurs caract´eristiques. Les notations sont donc exactement les mˆemes que dans
l’exercice 2 sur la com`ete de Halley et on donne les valeurs pour Mercure :
– sa p´eriode : T= 87,6 jours ≈88 jours
– son excentricit´e : e= 0,206 ≈0,2.
Calculer la valeur du demi-grand axe a, des rayons `a l’aph´elie et au p´erih´elie : rAet rP, enfin des
vitesse `a l’aph´elie et au p´erih´elie : vAet vP. Comparer ces grandeurs `a celles de la com`ete de Halley.
3.2 Pr´ecession du p´erih´elie.
L’orbite de la plan`ete Mercure s’´ecarte notablement de celle pr´evue par la premi`ere loi de Kepler :
elle ressemble certes `a une ellipse, mais dont le grand axe tourne autour du Soleil, dans le plan
de la trajectoire, `a une vitesse angulaire Ω d’environ 56” (secondes d’arc) par ann´ee terrestre. Ce
ph´enom´ene, appel´e pr´ecession du p´erih´elie, a deux causes : l’attraction gravitationnelle des autres
4

plan`etes, principalement, et une petite correction apport´ee `a la loi de gravitation newtonienne par la
relativit´e g´en´erale.
Le but de cette partie est d’´etudier la pr´ecession du p´erih´elie en mod´elisant l’influence des autres
plan´etes et la correction relativiste par une petite force s’ajoutant `a la force gravitationnelle newto-
nienne exerc´ee par le Soleil sur Mercure.
On consid`ere donc le mod`ele dans lequel une petite force de la forme
~
FP(~r) = B
r3~ur
o`u Best une constante, s’ajoute `a la force de gravitation newtonienne exerc´ee par le Soleil sur Mercure.
1. La force totale est-elle toujours centrale ?
2. Projeter la deuxi`eme loi de Newton (principe fondamentale de la dynanique) sur la direction
radiale en coordonn´ees polaires. On obtiendra une ´equation diff´erentielle en fonction de d2r/dt2,
dθ/dt et r, ainsi que des param`etres du probl`eme.
Une fa¸con de traiter cette ´equation consiste `a faire le changement de variable r(θ)→u(θ) o`u
u= 1/r. En exprimant dθ/dt en fonction de LO,met u, on obtient :
d2u
dθ2+1 + mB
L2
Ou=km
L2
O
.
3. On se place dans le cas o`u B= 0. R´esoudre l’´equation ci-dessus et exprimer uen fonction de
θ. On notera uAla valeur de u`a l’aph´elie. En d´eduire l’´equation de la trajectoire, r(θ). V´erifier
que la solution est bien une conique et trouver l’expression du param`etre pet de l’excentricit´e e.
4. On se place d´esormais dans le cas o`u B6= 0. R´esoudre l’´equation et en d´eduire l’´equation de la
trajectoire r(θ).
5. A l’instant initial, Mercure se trouve au p´erih´elie en θ= 0. Pour quelle valeur θ0de l’angle θla
plan`ete se trouvera-t-elle `a nouveau au p´erih´elie, c’est-`a-dire au plus pr`es du Soleil ?
6. On suppose que kmB/L2
Ok 1. Faire un d´eveloppement limit´e de θ0au premier ordre en B.
Exprimer : θ0−2π.
En d´eduire la vitesse angulaire de pr´ecession Ω en fonction de m,B,Tet LO.
7. La force FPdoit-elle ˆetre attractive ou r´epulsive pour que le p´erih´elie avance dans le mˆeme sens
que la plan`ete ?
8. Repr´esenter sch´ematiquement le mouvement de Mercure (on exag´erera la pr´ecession).
4 Exp´erience de Rutherford
Une particule Mconsid´er´ee comme ponctuelle, de masse met de charge q= 2e(e > 0) se dirige vers
un noyau tr`es lourd de charge Q=Ze (Zentier positif) plac´e en O. La particule est d´evi´ee sous l’effet
de la force d’interaction ´electrostatique
~
F=Qq
4π0
~ur
r2
o`u ~urest le vecteur unitaire d´efini par ~ur=~
OM/r (Voir Figure 5).
On admettra les hypoth`eses suivantes :
– Le r´ef´erentiel (O,x,y,z) li´e au noyau peut ˆetre consid´er´e comme galil´een.
– L’interaction gravitationnelle entre la particule et le noyau est n´egligeable.
– L’´energie potentielle d’interaction ´electrostatique entre la particule et le noyau devient n´egligeable
quand la distance les s´eparant est suffisamment grande.
5
 6
7
6
7
1
/
7
100%