Exercice écrit - Plate-forme Moodle de Supélec

Campus de Gif
2ème Année 2003 - 2004 Date : 27 Janvier 2004
Séquence 6 – voie 4 Heure : 10h- 12h
Durée : 2 heures
Exercice écrit
Commande des entraînements à vitesse variable
(Seuls documents autorisés : polycopiés de l’Ecole et notes personnelles de l’élève)
Partie 2 (12 pts)
Plate-forme de forage
On s'intéresse à l'étude d'un système de forage, le but du problème est de concevoir la stratégie de
régulation permettant d'atténuer l'effet néfaste, principalement sur la durée de vie du matériel utilisé, des
oscillations dues au phénomène de collé- glissé auquel il est soumis.
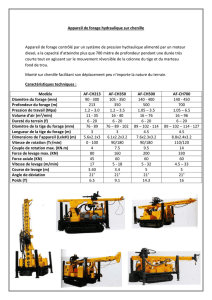
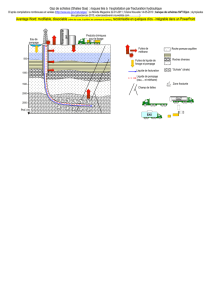
Brièvement, une plate forme de forage est composée : d'une table de rotation entraînée par un
moteur à courant continu et à excitation séparée, d'une tige de forage, d'une partie inférieure appelée BHA
(Bottom Hole Assembly) et constituée de tubes à parois épaisses qui fournit une force suffisante pour
forer, d'un trépan qui est l'outil permettant de percer la roche et enfin d'un système de levage comprenant
une tige d'entraînement servant à adapter la longueur de la tige de forage à la profondeur de celui-ci et un
système d'injection de boue pour favoriser l'élimination des débris détachés par le trépan. Le schéma de
l'installation est donné par la figure 1 suivante.
Figure 1. Schéma de la plate forme de forage
1- 5000
m
BHA
100- 300 m
Trépan
Tige de forage
30-80 m
Table de rotation
Moteur
Page 1 / 5

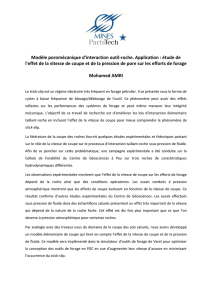
A. Le système de forage peut être modélisé, comme indiqué par la figure 2, en utilisant deux inerties
et couplées par un ressort à torsion linéaire de constante de raideur , et des frottements visqueux de
constantes d'amortissements et . Ce modèle est valable avec l'hypothèse que les variations de la
vitesse de rotation de la table sont négligeables devant celles du BHA.
1
J
2
Jk
1
a2
a
Ce système est soumis à un couple C, qui est le couple exercé sur la table de rotation, et est fournit par le
moteur à courant continu à travers la chaîne de transmission mécanique. comprend une partie de
l'inertie de la tige de forage et celle du BHA, comprend le reste de l'inertie de la tige, celle de la table
de rotation, celle de la transmission et celle du moteur.
2
1
J
2
J
1
ϕ
et 2
ϕ
désignent respectivement les positions
angulaires du trépan et de la table de rotation. Le trépan est soumis à un couple T.
tob
1
ϕ
tob
T
k
C2
J2
2
ϕ
a2
J1
a1
Figure 2. Modélisation du système de forage
A.1. On définit 12
ϕ
ϕ
ϕ
−
=, en désignant par 1
Ω
et 2
Ω
respectivement les vitesses angulaires du
trépan et de la table de rotation, écrire les équations différentielles qui décrivent la dynamique d'évolution
de ce système.
A.2. En prenant comme vecteur d'état et comme sortie
T
X),,( 21
ΩϕΩ
=2
Ω
=y, écrire la
représentation d'état de ce système,
),( UXfX =
&
la commande étant le couple , c'est-à-dire U
2
C2
C
=
.
A.3. Le couple T est une fonction non linéaire de la vitesse
tob 1
Ω
telle que :
()
)arctan(
2
)( 13111
12
ΩβΩβ
π
Ω
Ωβ
+= −
eTT dyntob
avec , NmTdyn 500=s5.9
1
=
β
,s2.2
2=
β
,..
s35
3=
β
Déterminer le système d'état linéarisé autour du point srad
e/10
11
=
=
Ω
Ω
, sous la forme:
BuAxx
+
=
&
Hxy =
Page 2 / 5

où , et
T
xxxx ),,( 321
=T
),,( 21
ΩϕΩ
=BA,
H
sont des matrices de dimensions appropriées, la
commande est u.
2
C=
Les valeurs numériques sont :
2
1374 kgmJ =, , ,
2
22120 kgmJ =radNmsa /05
1=radNmsa /425
2
=
et k. radNm /473=
A.4. La commande par retour d’état qui permet d'asservir la vitesse du trépan sur la grandeur de référence
ref
Ω
, avec eref 1
Ω
Ω
=, est :
ref
xlxlxlu
Ω
α
+
−−−= 332211
α
étant un gain constant dont le réglage permet d'avoir ref
tty
Ω
=
∞→ )(lim .
N.B Il n'est pas demandé de calculer les gains de retour d'état l et .
21 ,l3
l
On dispose de la mesure de 2
Ω
, pour mettre en œuvre cette commande par retour d'état, déterminer les
gains de l'observateur dont la représentation d’état est
)
ˆ
(
ˆˆ yyKBuxAx −++=
&
xHy ˆˆ =
où
−−
−
−
=
2.0223.00
101
0264.1134.0
A et ,
=
−4
1057.4
0
0
B
qui permet d'estimer le vecteur d'état et qui aurait comme équation caractéristique :
))(12( 10
2
ωλλξωλ
+++=
obs
P
où 7.0=
ξ
et srad /94.0
0=
ω
, on pourrait cependant choisir srad /10 01
ω
ω
=
, justifier ce choix.
B. Le couple est fourni, à travers la transmission mécanique, par un moteur à courant continu et à
excitation séparée, comme indiqué par la figure 3. On désigne par l'inductance et la résistance de
l'induit du moteur,
2
C
mm RL ,
m
Ω
est sa vitesse angulaire, V est la tension à ses bornes. Le rapport du réducteur de
vitesse en sortie du moteur est
m
7/ 12
=
=nnn .
1
n
2
n
2
Ω
m
Ω
Table
de rotation
Moteur
Figure 3. Motorisation
Page 3 / 5

On désigne par le courant d'induit du moteur et et les constantes de couple et électrique de
fcem.
m
Im
Ke
K
B.1. Ecrire l'équation différentielle et les relations algébriques qui lient les grandeurs électriques et
mécaniques du moteur, préciser la relation entre le couple moteur et le couple Cexercé sur la table
de rotation sachant qu'il y a conservation de la puissance mécanique entre l'arbre moteur et l'axe de
rotation de la table.
m
C2
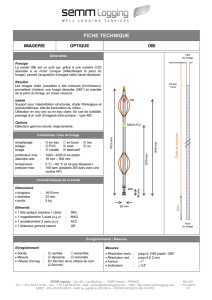
B.2. En régime permanent, le couple C tend vers une valeur
2NmC e4750
2
≈
. Dans ces conditions,
calculer la tension d'alimentation V du moteur, sachant que les réponses temporelles de
m1
Ω
et 2
Ω
du
système bouclé avec la commande de la question A.4 sont celles de la figure 4, on a ,
et
AKm6Nm /.7=
radVsKe/6.7=
Ω
01.0
=
m
R.
Figure 4. Vitesses angulaires du trépan et de la table de rotation
B.3. Que pouvez vous suggérer comme convertisseur de puissance pour l’alimentation du moteur,
justifier votre choix à partir des données dont on dispose.
B.4. On utilise un pont de Graëtz triphasé pour alimenter le moteur à courant continu. Le pont est associé
à un transformateur triphasé dont la réactance de fuite est :
Ω
ω
01.0
=
N, on néglige la chute de tension
due aux résistances des enroulements du transformateur. Dans le cas le plus contraignant, le courant dans
le moteur, en sortie du redresseur est : AIm1500=
Calculer, dans ces conditions, la chute de tension due à l’inductance de fuite du transformateur. •
•
Calculer le courant efficace et le courant moyen dans un thyristor du pont.
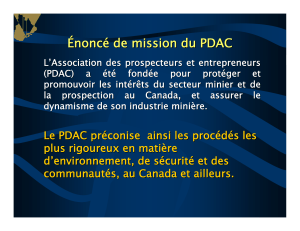
B.5. La figure 5 suivante présente la puissance moyenne dissipée dans un thyristor du pont en fonction du
courant moyen dans un thyristor
Page 4 / 5

I
th (moy)
Courant moyen
Pertes (W)
200 600 800 A
400
800
1200
1600
Figure 5. Puissance moyenne dissipée dans un thyristor
Calculer la résistance thermique du radiateur qu’il faut utiliser par thyristor pour assurer une
température de . On prend comme température ambiante C
jonction °=Θ 120 C
ambiante °=
Θ
40 . On a :
•
- (résistance thermique jonction – boîtier) WCR jb
th /021.0 °=
- (résistance thermique boîtier - radiateur) WCR br
th /005.0 °=
Calculer les pertes joules totales dans les thyristors. •
Page 5 / 5
1
/
5
100%