Redressement Commandé : Cours sur les Montages Thyristors

LE REDRESSEMENT COMMANDE
Presser la touche F5 pour faire apparaître les signets
qui favorisent la navigation dans le document.
Sommaire
1 Généralités ............................................................................................................................. 33
2 Montages mixtes .................................................................................................................... 33
2.1 Généralités ...................................................................................................................... 33
2.2 Etude du montage PD2 ................................................................................................... 34
2.3 Etude du montage PD3 ................................................................................................... 36
3 Montage tout thyristors.......................................................................................................... 40
3.1 Etude du montage PD2 ................................................................................................... 40
3.2 Etude du montage P3 ...................................................................................................... 41
3.3 Etude du montage PD3 ................................................................................................... 43
3.4 Réversibilité des montages tout thyristors...................................................................... 44
4 Groupement des redresseurs commandés .............................................................................. 47
4.1 Généralités ...................................................................................................................... 47
4.2 Etude d'un cas particulier de groupement série .............................................................. 48
4.3 Groupement en antiparallèle des montages tout thyristors............................................. 49
5 Utilisation des redresseurs commandés − Problèmes posés par les systèmes réels .............. 50
5.1 Dimensionnement de l'inductance de lissage ................................................................. 50
5.2 Choix et couplage du transformateur − Dimensionnement des redresseurs .................. 51
5.3 Chutes de tension − Rendement...................................................................................... 51
5.4 Comportement vis à vis du réseau d'alimentation .......................................................... 51
5.5 Conclusion − Critère de choix ........................................................................................ 53
5.6 Remarque au sujet de la commande des thyristors......................................................... 54

RE 33
B Redressement commandé
1 Généralités
La méthode d'étude est analogue à celle utilisée pour le redressement non commandé. Après
avoir, dans un premier temps, fait une étude théorique d'un certain nombre de montages, on
s'intéresse à quelques points particuliers liés à l'utilisation des redresseurs réels. Par contre,
nous n'envisagerons pratiquement aucune application ici, car les montages redresseurs com-
mandés sont essentiellement employés dans les variateurs de vitesse, auxquels nous consacre-
rons un chapitre particulier.
Les montages peuvent, de même, se classer en parallèle, parallèle double et série. Les carac-
téristiques de chaque type de montage étant similaires à celles obtenues en redressement non
commandé, nous ne ferons donc plus leur étude systématique. Par contre, on distinguera les
montages tout thyristors, qui ne contiennent que des redresseurs commandés, des montages
mixtes, qui comportent également des diodes, car, comme on le verra plus loin, il existe des
différences assez sensibles entre les deux types de montages redresseurs.
En ce qui concerne les notations utilisées, nous désignerons par α l'angle de retard à l'amor-
çage des thyristors, compté à partir du moment où une diode, placée au même endroit que le
thyristor, s'amorcerait ( certains auteurs parlent de "commutation naturelle" pour désigner cet
instant ). D'autre part, on affecte d'un indice "prime" les valeurs moyennes des tensions, ce qui
permettra de les distinguer des valeurs moyennes en redressement non commandé et de les ex-
primer en fonction de ces dernières. De même, on notera f's et f'p les facteurs de puissance et
on les exprimera en fonction des facteurs fs et fp correspondants.
2 Montages mixtes
2.1 Généralités
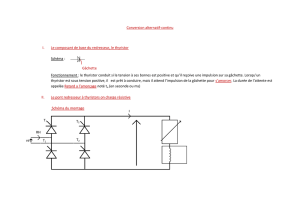
Ces dispositifs comportant des diodes et des thyristors, il existe diverses structures possi-
bles, même pour un type donné de montage. Les résultats obtenus étant similaires, nous n'étu-
dierons de façon systématique que le cas des montages parallèle double symétriques, consti-
tués par l'association d'un montage parallèle à diodes et d'un montage parallèle à thyristors.
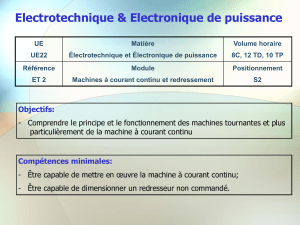
Dans ce qui suit, nous supposerons que c'est le montage à cathode commune qui est constitué
de thyristors ( Cf. figure 1 ), mais ceci n'est pas impératif, les résultats sont identiques avec un
dispositif comportant des thyristors à anode commune. Seuls des impératifs technologiques,
comme par exemple l'utilisation possible d'une commande de gâchette non isolée pour les
thyristors, peuvent faire préférer la première solution.

RE 34
L'étude de ces montages ( comme celle des montages tout thy-
ristors ) commence, de même, par la détermination des intervalles
de conduction des semi-conducteurs. Le courant débité étant inin-
terrompu, les deux montages parallèle fonctionnent de façon
indépendante. En particulier, les intervalles de conduction des
diodes sont les mêmes qu'en redressement non commandé. En ce
qui concerne les thyristors, leur déblocage est retardé de l'angle
α. Comme leur blocage est consécutif au déblocage de l'élément
suivant, également retardé du même angle, les intervalles de con-
duction s'obtiennent simplement en décalant de l'angle α les in-
tervalles de conduction qu'on aurait en redressement non commandé, c'est à dire, ici, ceux
qu'on aurait obtenus en appliquant la règle de fonctionnement des montages parallèle à catho-
de commune.
Remarque 1: Cette méthode très rapide de recherche des intervalles de conduction ne s'appli-
que qu'aux montages symétriques car il faut que tous les éléments d'un même montage parallè-
le soient identiques. Pour les montages dissymétriques, où ce n'est pas le cas, il faudra effec-
tuer une étude plus détaillée du fonctionnement de chaque partie.
Remarque 2: Tout ce qui vient d'être dit reste valable pour les montages série, qui ne diffèrent
des montages parallèle double que par le type de couplage des tensions d'alimentations.
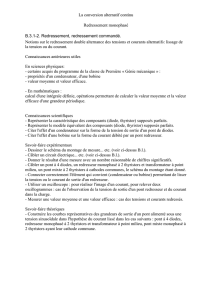
2.2 Etude du montage PD2
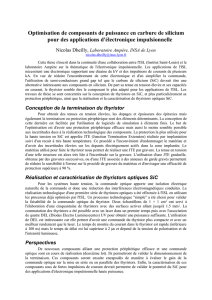
2.2.1 Allure des tensions et des courants
Posons comme habituellement e = E2sinθ.
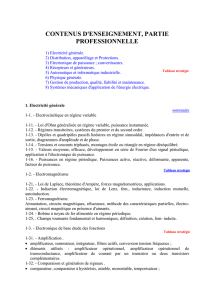
Ainsi que nous l'avons dit au paragraphe précédent,
les intervalles de conduction de D'1 et de D'2 sont in-
changés, ceux de T1 et de T2 sont décalés de l'angle
α. On obtient ensuite les allures des différentes gran-
deurs par des raisonnements analogues à ceux effec-
tuées en redressement non commandé ( Cf. figure
3 ). Signalons simplement que, comme les facteurs
de puissance au primaire et au secondaire sont égaux pour les montages PD, nous ne ferons
plus l'étude systématique au primaire pour ce type de montage.
Remarque 1: Entre 0 et α ( de même qu'entre π et π + α, 2π et 2π + α, ... ), il y a conduction de
deux redresseurs d'une même branche du pont, ce qui entraîne l'annulation de la tension de
sortie. La charge ne recevant aucune énergie pendant ces instants, on appelle ce fonctionne-
ment "phase de conduction en roue libre".
e1
e2
eq
T1
T2
Tq
u
fi
gure 1
D
'
1
D
'
2
D
'
q
T1
T2
up e
u
fi
gure 2
D
'
1
D
'
2
i
D'1 IC
i
s
i
p
vT1
i
T1

RE 35
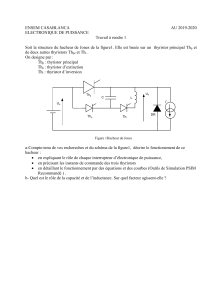
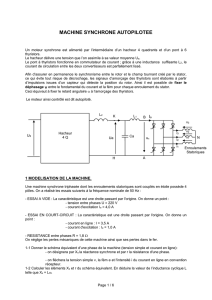
Remarque 2: En examinant l'allure de vT1,
on constate que la réapplication d'une ten-
sion positive sur les thyristors bloqués se
produit d'autant plus rapidement que α est
plus grand, ce qui peut entraîner des défauts
de blocage si l'angle de retard est très pro-
che de π. Pour éviter d'avoir à limiter cet
angle, on modifie le montage, soit en ajou-
tant une diode supplémentaire dite "diode
de roue libre", qui assure la conduction pen-
dant les phases de roue libre ( Cf. figure 4 ),
soit en permutant une diode et un thyristor
comme indiqué sur la figure 5. Dans les
deux cas, la d.d.p. aux bornes des thyristors
est maintenue inférieure à leur tension de
seuil pendant une demi-période quel que
soit α, ceci éliminant les possibilités de dé-
faut de blocage. On peut cependant noter
que ces modifications dissymétrisent le
montage, ce qui entraîne que la méthode de
détermination des intervalles de conduction
décrite plus haut ne s'applique plus ici. Par
contre, l'étude montre que les allures de u et
de is restent les mêmes que pour le montage
symétrique.
2.2.2 Calcul des grandeurs caractéristiques
2.2.2.1 Valeur moyenne de u
[]
()
UudEd
EE
C
'sincoscos== =−=+
∫∫
11
222
1
0
πθπθθ πθπα
π
α
π
α
π
En remarquant que E2
π est égal à UC
2 ( UC étant la valeur moyenne en redressement non
commandé ), on peut écrire le résultat sous la forme
(
)
UU
CC
'cos
=+1
2
α
fi
gure 5
fi
gure 4
u
vT1 ----
α π
π
+α 2
π
α π
π
+α 2π
e
−e
T
2 T1 T2
D
'
2 D
'
1 D
'
2
θ
IC
i
T1
θ
IC
i
D'1
θ
IC
i
s
−IC
θ
fi
gure 3
α

RE 36
2.2.2.2 Valeurs moyennes et efficaces des courants
a) Courant dans une diode et dans un thyristor
Les allures sont identiques au décalage près. On obtient immédiatement
IIIII
DC TC
C
DT
C
== ==
22
I
b) Courant dans le transformateur
Comme pour tous les montages PD, il est à valeur moyenne nulle. Sa valeur efficace est
donnée par
()
IidId
I
ssC
C
22
0
2
2
1
221
===−
∫∫
πθπθππα
π
α
π
, soit II
sC
=−1α
π
2.2.2.3 Facteur de puissance
Notons f' la valeur commune du facteur de puissance au primaire et au secondaire. De
f' = P/S = U'CIC/EIs, avec
()
UE
C
'cos=+
21
πα et II
sC
=−1α
π, on tire
()
f
EI
EI
C
C
'
cos
=+
−
21
1
πα
α
π
,
soit ff'cos
=+
−
1
21
α
α
π
en notant f=22
π la valeur correspondante en redressement non commandé.
2.2.2.4 Remarque
On constate que, pour un débit IC donné, le courant efficace au secondaire du transformateur
diminue lorsque α augmente ( il en est d'ailleurs de même pour les courants dans les redres-
seurs du pont lorsque le montage est équipé d'une diode de roue libre ). On pourra tenir compte
de ceci pour dimensionner les éléments du montage si celui-ci n'est pas destiné à fonctionner à
"pleine ouverture". Par contre, si α peut varier entre 0 et π ( ce qui est généralement le cas ),
les composants seront calculés comme pour un redresseur non commandé.
2.3 Etude du montage PD3
2.3.1 Allure des tensions et des courants
Posons e1 = E2sinθ, e2 = E2sin(θ −
2
3
π
) et e3 = E2sin(θ −
4
3
π
). L'étude des intervalles
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%