moment d`une force par rapport a un - GIPSA-Lab

Mécanique: chapitre 2
Forces; Moments
Forces; Moments

INTRODUCTION
Toute action mécanique s'exerçant sur un objet a pour effet soit:
¾de modifier son mouvement ou de le mettre en mouvement,
¾de le maintenir en équilibre,
¾de le déformer.
Toute action mécanique exercée sur un objet est décrite par quatre caractéristiques:
¾le point d'application,
¾la droite d'action,
¾le sens,
¾la valeur: son intensité.
Caractéristiques d’un VECTEUR
Une FORCE est une grandeur vectorielle
Poids
Portance

Une action sur un solide se décrit en général par PLUSIEURS FORCES.
ATTENTION !!
Il est souvent insuffisant de ne connaître que la somme vectorielle de toutes les forces pour décrire
le mouvement d’un solide.
Il est nécessaire de connaître une grandeur supplémentaire, le
MOMENT
total des forces
(somme vectorielle des moments des forces) s'exerçant sur le solide.
1
F
2
F
0
21 =+ FF
Somme vectorielle des forces
+= TORSEUR FORCE
Somme vectorielle des moments des forces
Une somme des forces nulle peut mettre en mouvement un solide (cas d'un couple de forces).

1. LES FORCES
¾son
point d'application
,
A
¾sa
droite d'action
, Δ
¾son
sens
,
¾son
intensité
,
F
.
F
r
A
Δ
Caractéristiques d’une force
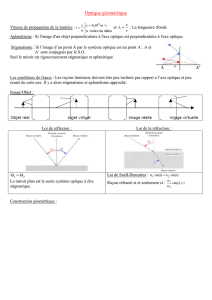
Les forces suivent donc les lois de l'algèbre des vecteurs,
21 FFF +=
1
F
2
F
1
F
2
F
x
e
y
e
z
e
Pour les composantes
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
z
y
x
f
f
f
F
1
1
1
1⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
z
y
x
f
f
f
F
2
2
2
2⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
+
+
+
=
zz
yy
xx
ff
ff
ff
F
21
21
21

1
F
2
F
21 FFF +=
FP −=
0
21 =++ FFP
Exemple:
solide ponctuel suspendu à 2 ressorts
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%