CENTRE d` INTERÊT : mise en service

Mr AUBERT
TP_thm1_axeXZ_MES.doc
Durée : 4h
Page 1 / 8
PROBLEMATIQUE :
CONDITIONS de DEROULEMENT de l’ESSAI :
Phases de l’essai
Objectifs
Activités
1_découverte (2h)
Définir l’ensemble des éléments constituant les
parties opérative et commande
découverte, identification, analyse
2_mise en service
(2h45)
exploiter les schémas électriques
mettre en service le dispositif en modes manuel et
automatique
relever quelques grandeurs cinématiques
configuration, réglage, mesures
3_synthèse (1h15’)
établir les relations cinématiques entre les
constituants mécaniques
analyse
RESSOURCES DOCUMENTAIRES :
Dossier axe X_Z de GTI Système / diaporama de présentation de la machine à courant continu « mcc1 » / notice
d’instruction et d’utilisation de l’oscilloscope Scopix ou Tektronics TDS 3014 (bi-voies)
RESSOURCES LOGICIELLES :
Logiciel d’acquisition et de traitement du signal de l’oscilloscope utilisé
RESSOURCES MATERIELLES :
Sous-système axe Z, casque audio
RESSOURCES MATERIELLES pour les MESURES :
Oscilloscope Scopix ou Tektronics TDS 3014 / un chronomètre / PC
CONSIGNES DE SéCURITé :
Les IPS ainsi que les instructions spécifiques de sécurité notifiées par les professeurs doivent être
respectées à la lettre. Tout manquement à ces instructions de sécurité sera immédiatement sanctionné.
SEANCE d’ESSAIS de SYSTEMES – Thème n°1
CENTRE d’ INTERÊT : mise en service
FAMILLE de SYSTEMES : contrôle de mouvement
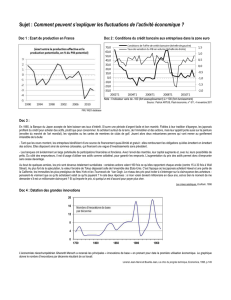
SYSTEME (photo) :
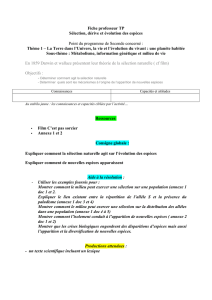
Dans les domaines du stockage de marchandises et de la
logistique, de nombreux systèmes automatisés (magasins
automatiques, trans-stockeurs) ont pour fonction de positionner
en un minimum de temps dans l’espace une charge donnée. Le
sous-système didactisé étudié ici permet d’aborder les principaux
aspects techniques relatifs au contrôle de ces mouvements.
L’étude consiste à :
découvrir les constituants du sous système AXE Z
mettre en service le sous-système
STS Electrotechnique,
Lycée de L’Essouriau

Mr AUBERT
TP_thm1_axeXZ_MES.doc
Durée : 4h
Page 2 / 8
Ce sous-système, représentatif d’un système de trans-stockage, est un véritable banc
d’expérimentation permettant des études comparatives de différentes motorisations en
reproduisant leurs principales utilisations dans le domaine de la force motrice : levage,
translation, variation de la charge utile, deux sens de marche, commande de type échelon ou
rampe, accélération, décélération.....
La partie opérative est composée d’un seul axe pouvant prendre deux positions : horizontale
(axe X) et verticale (axe Z) pour l’analyse des deux applications distinctes : translation ou
levage.
Trois types de motorisation, montables et interchangeables sur la partie opérative de base
(axe), sont disponibles avec leurs commandes associées :
- motorisation courant continu avec un variateur qui valorise particulièrement le relevé
couple-vitesse dans les quatre quadrants,
- motorisation asynchrone avec son variateur permettant d'appliquer différentes lois de
commande : U/f, contrôle vectoriel de flux en boucle ouverte, contrôle vectoriel de flux en
boucle fermée par un codeur incrémental.
- motorisation brushless.
Sur ces trois motorisations, deux types de commande sont possibles :
manuelle : permet la conduite de l’axe en fonctionnement semi-automatique suivant un cycle
pendulaire réglable et défini avec une rampe d’accélération, un palier, et une rampe de
décélération.
automatique : permet, à partir d’un API ou de tout autre système programmable faisant
fonction de calculateur, de générer les différentes lois de vitesse, sinus, exponentielles,
paliers... Un codeur incrémental 2 voies, monté en standard sur la PO, permet d’étudier
spécifiquement la variation/régulation de vitesse et l’asservissement de position.
1. Découverte des constituants de l’axe Z
1.1 Indiquer la procédure à respecter pour faire le travail ci-
dessous en sécurité.
1.2 Identifier la motorisation disponible sur le système. Précisez
les options installées.
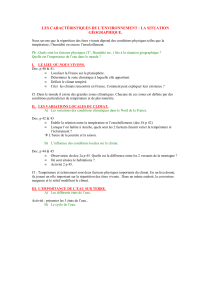
1.3 Identifier (nom et fonction) sur la photo ci-contre de chacun
des éléments repérés par un numéro.
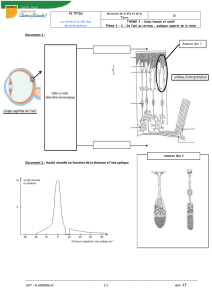
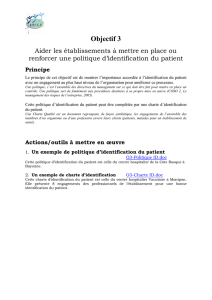
1.4 Identifier (nom et fonction) sur la photo ci-dessous de
chacun des éléments du moteur repérés par un numéro.
Le moteur :
1.5 Donner, en vous aidant du diaporama « mcc1 »:
- le schéma électrique équivalent de ce moteur à courant continu,
- l'expression de sa vitesse moyenne en fonction de la tension d’alimentation moyenne de
l’induit U,
- la relation entre Cem, I, Ω et E,
- l'expression du couple sur l’arbre en fonction de Kt et de I (Kt=kΦe).

Mr AUBERT
TP_thm1_axeXZ_MES.doc
Durée : 4h
Page 3 / 8
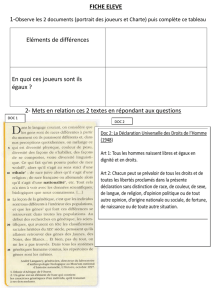
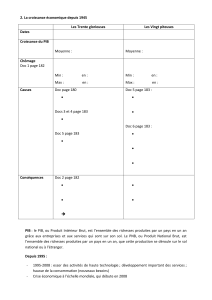
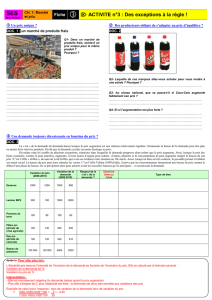
1.6 Identifier sur la photo ci-contre chacun des
éléments de l’armoire électrique de
commande et de gestion de l’énergie
électrique repérés par un numéro.
L'armoire :
1.7 Rédiger un tableau récapitulatif des
différents actionneurs, préactionneurs et
capteurs implantés sur le système et
indiquer leurs fonctions respectives dans
ce système. Pour les capteurs, précisez la
grandeur physique mesurée et la nature de
l’information délivrée.
Le détecteur de proximité n’est pas représenté sur les
schémas (sauf sur bornier folio4 SUB25), aucune
référence disponible.
2. Mise en service du sous-système
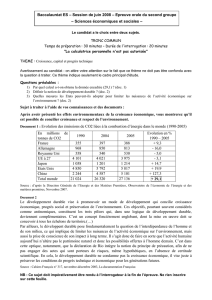
2.1 A partir de l’analyse des schémas électriques fournis :
- décrire la procédure de mise en énergie pour un fonctionnement en mode manuel,
préciser et en repérer clairement les organes de commande à exploiter (schémas électriques
donnés en annexes). Valider votre proposition auprès du professeur.
- représenter alors cette procédure sous la forme d’une équation logique
2.2 Lister les contraintes et précautions préalables à la mise en route du système. On
s’intéressera tout particulièrement à :
- la position du chariot lors de la mise sous tension par rapport aux plages de
fonctionnement « normale » et « sur-course »,
- la condition de mise en défaut du système lorsque l’interrupteur de verrouillage du
frein à manque de tension est sur la position « 1 »,
- la position du potentiomètre de consigne de vitesse,
- la procédure à suivre après une mise en défaut du système (dépassement des
butées limites de déplacement).
- ainsi qu’au rôle du BP de remise à zéro (ràz)
Remarques : - le disjoncteur magnétothermique placé en tête de l’installation est susceptible de déclencher à la mise sous tension à
cause du courant d’appel du transformateur placé en aval. Il faut le réarmer et renouveler la mise en marche,
- interrupteur frein sur « verrouillage 0 » = frein à manque de tension non alimenté : freine
- interrupteur frein sur « verrouillage 1 » = frein à manque de tension alimenté : ne freine pas
- il faut maintenir l’appui sur le BP « marche » environ 1s pour laisser au variateur le temps de fermer son contact de
validation.
2.3 En présence du professeur, mettre en énergie puis en service (mode manuel) le système.
2.4 Effectuer différents réglages (consigne de vitesse, d’accélération (pente de la rampe du
profil trapézoïdal de vitesse)) et observer leur influence sur le déplacement.
2.5 Indiquer ce qu’il se passe dans l’armoire électrique à chaque changement de sens du
chariot. Identifier les éléments en question sur le schéma électrique et justifier leur rôle.
2.6 Relever (pas d’impression d’oscillogramme), à l’aide de l’oscilloscope et en mode de déclenchement
normal, l’évolution de la vitesse du chariot et du couple en fonction du temps. Quelle est la
valeur moyenne de cette vitesse ? Expliquer les variations du couple.

Mr AUBERT
TP_thm1_axeXZ_MES.doc
Durée : 4h
Page 4 / 8
ANNEXES

Mr AUBERT
TP_thm1_axeXZ_MES.doc
Durée : 4h
Page 5 / 8
 6
7
8
6
7
8
1
/
8
100%