Étude de la stabilité du mouvement de l`électron rayonnant à l

´
Etude de la stabilit´e du mouvement de l’´electron
rayonnant `a l’approximafion lin´eaire. Application aux
anneaux de stockage. - (Premi`ere partie)
Francis Fer
To cite this version:
Francis Fer. ´
Etude de la stabilit´e du mouvement de l’´electron rayonnant `a l’approximafion
lin´eaire. Application aux anneaux de stockage. - (Premi`ere partie). Journal de Physique, 1963,
24 (10), pp.746-752. <10.1051/jphys:019630024010074600>.<jpa-00205560>
HAL Id: jpa-00205560
https://hal.archives-ouvertes.fr/jpa-00205560
Submitted on 1 Jan 1963
HAL is a multi-disciplinary open access
archive for the deposit and dissemination of sci-
entific research documents, whether they are pub-
lished or not. The documents may come from
teaching and research institutions in France or
abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est
destin´ee au d´epˆot et `a la diffusion de documents
scientifiques de niveau recherche, publi´es ou non,
´emanant des ´etablissements d’enseignement et de
recherche fran¸cais ou ´etrangers, des laboratoires
publics ou priv´es.

746.
ÉTUDE
DE
LA
STABILITÉ
DU
MOUVEMENT
DE
L’ÉLECTRON
RAYONNANT
A
L’APPROXIMAFION
LINÉAIRE.
APPLICATION
AUX
ANNEAUX
DE
STOCKAGE.
(Première
partie)
Par
FRANCIS
FER,
Laboratoire
Joliot-Curie
de
Physique
Nucléaire,
Orsay.
Résumé. 2014
La
stabilité
est
étudiée
en
prenant
pour
équation
du
mouvement
l’équation,
peut
être
compliquée
mais
néanmoins
nécessaire
pour
les
raisons
données
à
l’introduction,
de
Lorentz-
Abraham.
Dans
une
première
partie
on
établit
les
équations
des
petits
mouvements
dans
un
champ
électromagnétique
quelconque,
puis
ces
équations
sont
particularisées
au
champ
à
plan
de
symé-
trie.
Dans
une
deuxième
partie,
on
calcule
les
coefficients
d’amortissement
des
oscillations,
amor-
tissement
dû
au
rayonnement ;
ce
calcul
nécessite
un
développement
des
solutions
par
rapport
au
terme
de
rayonnement,
développement
dont
la
validité
est
discutée
au
§
4.
Le
calcul
met
en
évi-
dence
un
phénomène
de
déstabilisation
de
l’oscillation
de
phase
par
le
rayonnement,
mais
qui
n’a
d’effet
qu’à
de
très
hautes
énergies.
Abstract.
2014
The
stability
is
investigated
on
the
basis
of
the
Lorentz-Abraham
equation
of
motion
for
the
radiating
electron ;
although
complicated,
this
equation
is
needed
for
reason
given
in
the
Introduction.
In
the
first
part
of
this
paper,
the
equations
of
oscillations
are
derived
for
an
arbitrary
electromagnetic
field,
then
particularized
to
a
symmetry
plane
field.
The
second
part
consists
in
the
calculation
of
damping
factors
due
to
the
radiation
loss ;
this
calculation
needs
some
expansion
with
respect
to
the
radiating
term,
the
validity
of
which
is
discussed
in §
4.
The
calculation
shows
there
is
a
phenomenon
of
destabilization
of
the
phase
oscillation
due
to
the
radiation
loss,
which
is
an
effect only
at
very
high
energy.
LX
JOURNAL
DE
PHYSIQUE
TOME
24,
OCTOBRE
1963,
Ce
travail
a
pris
sa
source
dans
un
des
multiples
prob]6mes
poses
par
la
construction
de
1’anneau
de
stockage
du
Laboratoire
des
Hautes
Energies
d’Orsay,
la
stabilite
des
oscillations
autour
de
la
trajectoire
d’equilibre
a
I’approximation
lin6aire.
11
existe
comme
on
sait
sur
ce
sujet
un
certain
nombre
de
travaux
dont
ceux
de
Kolomenski
et
Lebedev
[1]
et
de
K.
W.
Robinson
[2]
et,
durant
le
temps
que
je
conduisais
ces
calculs,
F.
E.
Mills,
du
M.
U.
R.
A.,
alors
en
s6jour
a
Saclay,
achevait
les
siens
et
en
donnait
la
primeur
au
Laboratoire
des
Hautes
Energies
(ils
ont
ete
publi6s
depuis
[3]).
Avant
de
passer
au
calcul
proprement
dit
je,
voudrais
donner
la
raison
qui
m’a
fait
employer,
comme
equation
fondamentale
du
mouvement,
1’6quatioii
de
Lorentz-Abraham,
donn6e
au §
1.
L’intervention,
au
cours
du
mouvement
de
l’électron,
de
la
perte
d’énergie
et
de
la
force
de
freinage
qui
en
d6coule
modifie
assez
profondement,
comme
on
sait,
les
proprietes
de
stabilite
du
mou-
vement.
Pour
6valuer,
sans
trop
de
complications,
la
force
de
freinage
on
peut
tenir
le
raisonnement
suivant
(valable
seulement
pour
les
vitesses
rela-
tivistes,
mais
ce
sont
celles-la
qui
pratiquement
nous
int6ressent) :
les
photons
6mis
sont
concen-
tres
dans
un
cone
de
tres
petite
ouverture
(de
l’ordre
du
milliradian)
axe
sur
la
trajectoire ;
en
negligeant
cette
ouverture
on
peut
dire
que
pra-
tiquEment
la
force
de
freinage
est
dirigee
tangen-
tiellement
a
la
trajectoire,
et
que
par
consequent
on
en
obtiendra
la
grandeur
en
égalant
sa
puissance
à
la
puissance
rayonnée,
dont
on
connait
par
ailleurs
la
valeur.
Or,
a
la
reflexion,
l’approximation
qui
consiste
à
négliger
ainsi
la
composante
transversale
de
la
réaction
de
rayonnement
apparait
discutable.
La
reaction
de
rayonnement
cause
en
eflet,
par
rapport
a
la
trajectoire
imagin6e
non
rayonnante,
un
ralen-
tissement
longitudinal
et
un
d6placement
trans-
versal ;
le
ralentissement
est
due
a
la
seule
compo-
sante
tangentielle
de
la
reaction,
tandis
que
le
déplacement
transversal
est
dû
a
la
composante
normale
de
la
force
d’une
part,
et
au
ralentisse-
ment
d’autre
part
par
1’intermediaire
d’un
effet
purement
géométrique ;
mais
il
est
clair
que
ce
dernier
effet
est
du
second
ordre,
de
sorte
qu’il
n’apparait
pas
impossible
que
les
deux
d6pla-
cements
transverses
soient
de
grandeurs
corn-
parables,
meme
quand
la
composante
normale
de
freinage
est
petite
devant
la
composante
tangen-
tielle.
De
plus
dans
un
anneau
de
stockage,
le
ralentissement
est
compense
par
une
acceleration
H.
F.
qui
n’a
aucune
raison
de
compenser
aussi
la
composante
normale
de
freinage,
de
sorte
que,
sur
un
grand
nombre
de
tours,
il
peut
se
produire
des
effets
de
compensation
et
des
effets
cumulatifs
dont
nous
ne
pouvons
rien
angurer
sans
un
calcul
d6taiII6.
En
bref
il
n’est
pas
justifi6,
au
moins
a
priori,
de
negliger
1’influence
de
la
composante
normale
de
la
reaction
de
rayonnement
stir
la
sta-
Article published online by EDP Sciences and available at http://dx.doi.org/10.1051/jphys:019630024010074600

747
bilité,
et
on
verra
au
paragraphe
6,
itt
fine,
qu’il
en
est
de
même a
posteriori,
cette
approximation
tronquant
les
r6sultats
de
termes
fondamentaux.
11
est
donc
plus
sur
de
recourir
a
1’expression
complete
de
la
reaction
de
rayonnement :
cette
expression
a
ete
donn6e
pour
la
premiere
fois
par
Lorentz
[4],
puis
étendue
au
cas
relativiste
par
Abraham
[5]
et
von
Laue
[6].
11
est
probable,
pour
plusieurs
raisons,
qu’elle
ne
repr6sente
qu’une
premiere
approximation
de
la
realite,
mais
c’est
la
seule
expression
dont
on
dispose
actuellement
[7].
Son
emploi
complique
sans
doute
un
peu
les
calculs ;
cependant,
ainsi
qu’on
le
verra,
il
est
possible
de
mener
ceux-ci
jusqu’au
bout
sans
faire
d’approximations
simplificatrices
en
route
(6tant
bien
entendu
que
des
le
depart
on
s’en
tient
à
l’approximation
lin6alre
des
petits
mouvements).
Cette
etude
comprend
pour
1’essentiel
deux
parties
distinctes.
Dans
la
premiere
partie,
paragraphes
1
et
2,
j’etablis,
a
partir
de
1’equation
de
Lorentz-
Abraham,
les
équations
des
petits
mouvements
(ou
encore
equations
aux
variations)
autour
d’une
trajectoire
de
reference
r
quelconque ;
le
principal
probl6me
a
r6soudre
ici
est
d’obtenir
les
equations
les
plus
simples
possibles,
et
les
mieux
adaptees
aux
etudes
ult6rieures
de
stabilité :
on
y
parviendra
en
projetant
les
petits
mouvements
dans
un
tri6dre
T
dont
l’origine
est
sur
r
et
dont
la
rotation
(ou
meme
un
mouvement
plus
general)
est
choisie
en
fonction
de
la
forme
de
r.
Les
equations
générales
seront
ensuite
particularisées
(§3)
au
cas
d’un
champ
poss6dant
un
plan
de
symetrie
et
d’une
tra-
jectoire
r
situ6e
dans
ce
plan
(mais
non
n6eessaire-
ment
fermee),
le
tri6dre
T
s’identifiant
alors
au
tri6dre
de
Frenet.
Les
diverses
equations
obtenues
dans
cette
pre-
mi6re
partie
comprennent
6videmment
comme
cas
particulier
le
mouvement
dans
un
champ
6lectro-
magnet,ique
en
1’absence
de
rayonnement.
La
deuxi6me
partie
(§,,4’
a
7)
consiste
en
l’utili-
sation
des
equations
precedemment
6tablies
pour
1’etude
des
coefficients
de
stabilité
de
la
trajectoire
d’equilibre
dans
un
anneau
de
stockage
a
electrons.
De
quelque
maniere
qu’on
opere,
ces
coefficients
s’obtiennent
en
partant
des
exposants
caracté-
ristiques
d6finis
en
1’absence
de
rayonnement
et
en
les
corrigeant
de
1’influence
de
ce
dernier ;
analy-
tiquement,
cela
revient
a
faire
un
d6veloppement
des
solutions
des
equations
d’oscillations
par
rap-
2
q2
port
au
param6tre c = - 3 m,c
qui
commande
le
port au
parametre e =
3
moc
q
terme
de
rayonnement.
Mats
l’application
de
cette
m6thode
est
assez
delicate
dans
le
cas
qui
nous
occupe
parce
que
le
petit
paramètre E
affecte
les
dérivées
d’ordre
maximum,
ce
qui
apparente
1’6quation
de
Lorentz-Abraham
aux
equations
de
relaxation
et
pose
de
difflciles
probl6mes,
en
parti-
culier
celui
de
la
justification
de
la
méthorle ; j
j’en
expose
le
principe
au
paragraphe
4,
mais
seulement
le
principe,
une
justification
complete
sortant
du
cadre
de
ce
travail.
Le
paragraphe 5
est
eonsaer6
au
calcul
du
coeffi-
cient
d’amortissement
des
oscillations
verticales,
qui
ne
soul6ve
pas
de
probl6me.
Les
oscillations
horizontales
en
posent
davantage ;
on
verra
en
effet
au
paragraphe
6
que
le
rayonnement
a
pour
effet,
non
seulement
de
creer
un
amortissement
ou
une
amplification
(selon
les
valeurs
du
gradient
de
champ)
des
oscillations
radiales
et
longitudinales,
mais
aussi
de
diminuer
la
frequence
de
ces
der-
nieres ;
cette
diminution,
totalement
négligeable
aux
energies
de
l’ordre
du
GeV,
amène à
l’insta-
bilit6
pour
les
tres
hautes
energies.
Le
paragraphe
7
enfin
a
pour
but
d’appliquer
pratiquement
les
formules
th6oriques
pr6c6dem-
ment
obtenues
pour
les
coefficients
d’amortisse-
ment
en
n6gligeant
les
termes
d’importance
infime
ou
secondaire.
On
verra
que
les
r6sultats
concordent
avec
ceux
de
F.
E.
Mills,
mais
different
de
ceux
de
Kolomenski
et
de
Robinson
pour
les
oscillations
radiales
et
longitudinales
dans
le
cas
de
gradients
de
champ
variables.
Je
ne
voudrais
pas
terminer
cette
introduction
sans
remercier
MM.
J.
Andrade
e
Silva
et
G.
Lochak
pour
les
discussions
fructueuses
que
nous
avons
eues
tout
au
long
de
ce
travail
et
la
collaboration
amicale
qu’ils
y
ont
ainsi
apport6e.
1.
Notations,
6quations
du
mouvement
et
rappels.
-
J’utiliserai
le
plus
souvent
le
forma-
lisme
tensoriel
de
la
relativite
restreinte,
parce
qu’il
permet
des
6critures
plus
condens6es
et
plus
syme-
triques ;
en
outre
1’emploi
du
temps
propre
comme
variable
ind6pendante,
qui
est
un
des
traits
de
ce
formalisme,
a
l’avantage
de
rendre
autonomes
les
equations
dinerentielles
du
mouvement.
11
ne
faut
cependant
pas
oublier,
le
moment
venu
des
appli-
cations
numeriques,
que
le
temps
propre
s’6coule
beaucoup
plus
lentement
que
le
temps
de
l’obser-
vateur,
et
ne
pas
confondre
les
deux.
Les
variables
spatio-temporelles
du
référentiel
de
l’observateur
sont
xyzt,
que
nous
condenserons
sous
la
notation xP
(p,
et
tous
les
indices
grecs
==
0, 1, 2, 3 ;
XO
=
t) ;
les
variables
d’espace
seront
affectées
d’indices
latins
(i,
k,
...
=
1, 2,
3).
La
m6trique
d’espace-temps
est
la
forme
quadra-
tique
en
coordonn6es
contrevariantes,
et
la
differentielle
du
temps
propre
d7
est
d6finie
par
Nous
d6signerons
par uP
et
yP
leg
quadriverteurs
vitesse
et
acceleration
d’univers

748
par
v,
de
coinposaiites
vk,
la
vitesse
spatiale
habi-
tuelle
et
par v
=
B11(VI)2
la
grandeur
de
la
vitesse.
Nous
utiliserons
6galement
la
variable
u
s
6tant
l’abscisse
curviligne
le
long
de
la
trajectoire
spatiale.
Les
trois
variables v
(ou p
=
v/c),
uO
=
dildr,
u
ne
repr6sentent
qu’un
seul
et
meme
param6tre
physique,
la
vitesse
ou
1’energie
de
la
particule,
et
on
a
entre
elles
le
syst6me
de
relations
qui
permet
de
passer
facilement
de
l’une
a
1’autre
u°
n’est
pas
autre
chose
que
le
rapport
W/W°
de
1’energie
de
la
particule
a
son
énergie
au
repos
tVO
=
mo
c2.
La
deuxi6me
relation
ci-dessus
s’écrit
aussi,
sous
forme
tensorielle
(up
sont
les
composantes
covariantes
du
quadri-
vecteur
vitesse :
ui
=
Ui,
uo
= -
c2
uo ;
Up
uP
d6signe
une
multiplication
contractee
suivant
la
convention
g6n6rale
des
indices
muets).
Nous
prendrons
pour
equations
du
mouvement
le
syst6me
de
Lorentz-Abraham
danes lequel
les
grandeurs
m6caniques
etant
évaluées
en
CGS,
la
charge q
en
u.
6.
m.
CGS ;
F
est
le
tenseur
électromagnétique
du
champ
externe,
de
tableau
E
de
composantes
Ek
6tant
le
champ
6lectrique,
H
de
composantes
Hk
le
champ
magnétique ;
l’un
et
1’autre
peuvent
d6pendre
du
temps t ;
e(DP
est
la
reaction
de
rayonnement,
OP
ayant
pour
expres-
sion
La
réaction
de
rayonnement
comprend,
comme
on
le
voit,
deux
terms :
l’un,
derivee
troisieme
des
coordonn6es,
a
des
composantes
spatiales
qui
forment
un
vecteur
dispose
de
maniere
quelconque
par
rapport
a
la
vitesse ;
l’autre
est
colin6aire
au
vecteur
vitesse,
avec
le
coefficient
- e
yx
-(Ie’!..
On
ram6ne
facilement
ce
coefficient
aux
quantités
m6caniques
usuelles :
il
suffit
pour
cela
de
partir
de
l’equation
qu’on
transf orme
au
moyen
des
equations
(2)
pour
obtenir
(d6riv6es
de
1’6nergie
et
de
la
vitesse
prises
par
rapport
au
temps
t) ;
en
projetant
l’accélération
dvidt
sur
le
tri6dre
de
Frenet
on
peut
encore
ecrire
(p :
rayon
de
courbure).
On
voit
donc
que
y>,
ir’
est
une
quantité
essentiellement
positive
et
que
par
suite
le
second
terme
de
c(DP
est
un
terme
de
freinage,
oppose
a
la
vitesse.
L’6quation
(M)
d’indice
zero
est
1’equation
de
1’energie.
Si
on
y
explicite
les
composantes
F’
on
obtient
qu’on
peut
transformer,
en
tenant
compte
de
la
definition
de
x
et
de
l’énergie
W,
en
Lorsque
la
trajectoire
rest
fermée
et
parcourue
d’un
mouvement
p6riodique
on
obtient,
en
multi-
pliant
les
deux
membres
de
(6)
par
dT,
en
iiit6-
grant
sur
une
p6riode
et
en
remarquant
que
les
int6grales
de
duo/dr
et
d 2 uojd-r2
sont
nulles,
l’équation
le
signe
designant
l’intégration
sur
une
p6riode
du
mouvement,
p6riode
qui
peut
consister
en
un
tour
complet
ou
11n
ième
de
tour.
Le
premier
membre
repr6sente
1’apport
d’6nergle
H.
F.,
le
second
la
perte
d’énergie
due
au
rayonnement,
par
p6riode.
Les
quatre
equations
condens6es
en
(11I)
admettent
la
relation
(3)
comme
int6grale
premier
(il
suffit
pour
le
voir
de
multiplier
les
deux
membres
de
(M)
par
up
et
de
contracter).
11
est
done
6qui-
valent,
et
plus
ou
moins
avantageux
suivant
les
cas,
d’utiliser
le
système
(M)
tel
quel,
ou
un
s-vst6me
de
remplacement
constitué
par 3
quelconques
des
equations
(M)
et
1’equation
(3).

749
L’ecriture
du
syst6me
(M)
est
classique ;
on
aura
remarque
que
ce
n’est
pas
une
6criture
canonique
en
ce
sens
que
la
d6riv6e
d’ordre
maximum
n’est
pas
plac6e
isol6ment
au
premier
membre ;
la
raison
en
est
que,
sous
reserve
d’admettre
un
postulat
physique
que
nous
verrons
au
paragraphe
4,
les
d6riv6es
troisiemes jouent
le
role
de
termes
correc-
tifs
en
laissant
ainsi
a
1’6quation
(M)
son
allure
d’équation
de
la
M6canique,
qu’elle
n’a
pas
en
toute
rigueur.
2.
Atablissement
des
equations
aux
varia-
tions.
-
Consid6rons
une
trajectoire
d’espccce-
temps
r
des
equations
(M),
et
une
trajectoire
r’
infiniment
voisine
(infiniment
voisine
dans
1’espace-
temps).
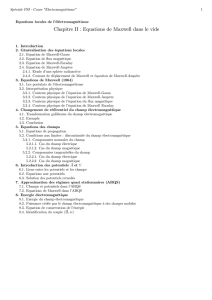
Conformément
au
procédé
constamment
utilise
dans
ce
genre
d’etudes,
nous
définissons
r’
en
prenant
r
comme
reference,
au
moyen
d’un
déplacement
d’espace-temps
infiniment
petit
MM’
(fig.
1).
Nous
nous
proposons
d’établir
les
equations
diff6rentielles
qui
r6gissent
ce
déplace-
ment
en
arretant
ces
equations
a
leur
approxima-
tion
lin6aire.
Nous
ne
ferons
sur
la
trajectoire
h -
hormis
bien
entendu
la
regularite
math6matique
indis-
pensable
-
aucune
hypoth6se
particuli6re,
et
ce
pour
la
raison
suivante.
Si
les
trajectoires
planes
fermees
sont
parmi
les
plus
frequemment
ren-
contr6es
et
les
plus
faciles
a
traiter,
il
existe
un
cer-
tain
nombre
de
cas,
d’intérêt
pratique,
ou
il
peut
etre
avantageux de
considerer
des
trajectoires
de
réfé-
rence
plus
compliqu6es :
trajectoires
spirales
dans
un
cyclotron
par
exemple,
trajectoire
gauchies
par
def aut
de
champ
ou
volontairement,
etc....
11
est
donc
int6ressant
de
poss6der
les
equations
géné-
rales
des
petits
mouvements,
qu’on
pourra
ensuite
particulariser
pour
chaque
cas
6tudl6
(c’est
ce
que
je
ferai
ensuite
pour
le
cas
pratique
d’un
anneau
de
stockage).
Comme je
l’ai
dit
plus
haut,
le
probl6me
n’est
pas
d’établir
les
equations
aux
variations
du
système
(M)
dans
des
coordonn6es
cartesiennes
quel-
conques,
ce
qui
est
facile,
mais
de
trouver
un
sys-
t6me
de
coordonn6es
curvilignes
adapt6
a
la
tra-
jectoire
de
reference
choisie
--
ou
physiquement
imposee
-
et
qui
satisf asse
a
ces
deux
ohligations :
donner
aux
equations
des
petits
mouvements
la
forme
la
plus
simple
pour
l’ analyse
ulterieure ;
caract6riser
de
maniere
simple
les
parametres
phy-
siques
du
déplacement,
a
savoir
1’ecart
longitu-
dinal
ou
de
phase
et
1’6cart
transversal.
Pour
arriver
a
cet
objectif
on
peut,
soit
ecrire
1’equation
(M)
en
coordonn6es
curvilignes
quel-
conques
puis
les
particulariser
graduellement
de
maniere
a
simplifier
le
syst6me
des
petits
mouve-
ments,
soit
ecrire
les
equations
aux
variations
dans
des
axes
cartesiens
puis
projeter
les
petits
mouve-
ments
dans
des
axes
lies
a
F
et
qu’on
d6term’nera
au
mieux.
Bien
que
la
premiere
m6thode
soit
un
peu
plus
rapide
et
au
fond
plus
naturelle, j"em-
ploierai
la
seconde,
qui
demande
un
formalisme
tensoriel
moins
poussé.
FIG. 1.
Designons
par
3xP
== çP
les
coordonnees
du
deplacement
MM’
dans
les
axes
cartesiens
fixes
Oxyzt.
A
1’6cart
&xP
correspond
une
certaine
varia-
t,ion
du
temps
propre,
3,r,
que
l’on
peut
calculer
en
fonction
de
dPIdT
en
variant
1’equation
(3) ;
il
suffit
alors
de
varier,
suivant
une
m6thode
bien
connue,
les
diff6rents
termes
de
1’6quation
(M)
pour
obtenir, a
1’etat
brut
en
quelque
sorte,
Ie
sys-
t6me
suivant
Quand
r
est
exprime
en
fonction
des
çP,
on
a
affaire
a
un
syst6me
de
4
equations
a
4
inconnues,
mais
qui
ne
comporte
en
réalité
que
3
equations
indépendantes :
on
peut
s’en
assurer
en
en
effec-
tuant
la
multiplication
contractee
par
up,
et
cela
r6sulte
d’ailleurs
de
ce
qu’il
d6coule
de
1’6qua-
tion
(M)
qui
poss6dait
d6jh
elle-m6me
ce
caract6re.
Cette
propriete
entraine
une
indétermination
qui
s’explique
imm6diatement
par
un
raisonne-
ment
geometrique,
et
qui
va
permettre
de
simpli-
fier
les
équations
aux
variations.
Dans
l’infiniment
petit,
si
M’
est
un
point
de
r’,
le
point
M"
d6duit
de
M’
par
une
translation
tangente
a
r’
(ou
pa-
rall6le
a
la
tangente
en
M
a
r,
a
des
infiniment
petits
du
second
ordre
pr6s)
et
de
grandeur
quel-
conque,
est
encore
un
point
de
r’ ;
done
si
un
vec-
teur §P
vérifie
les
equations
(7)
le
vecteur çP
+ ’Jo uP
( va
quelconque)
les
vérifie
6galement.
Consid6rons
alors
un
référentiel
mobile -6
constitué
par
trois
axes
vi
(i
=
1,
2,
3)
du
genre
espace
et
un
axe
vo
identique
au
vecteur
up,
c’est-à-dire
tangent
a
r.
D’apr6s
ce
qui
precede
les
equations
aux
varia-
tions,
projetees
dans
le
référentiel
1),
ne
doivent
d6pendre
que
des
composantes vk ;
on
pourra
alors
extraire
du
systeme
(7)
transform6
un
systeme
 6
7
8
6
7
8
1
/
8
100%