Portunus un simulateur mécatronique (suite)

T E C H N O L O G I E M a i - j u i n 2 0 0 7 M a i - j u i n 2 0 0 7 T E C H N O L O G I E
T E C H N O L O G I E M a i - j u i n 2 0 0 7 M a i - j u i n 2 0 0 7 T E C H N O L O G I E
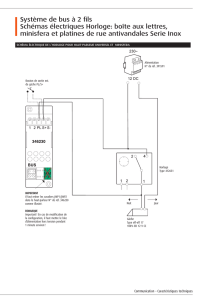
Le problème
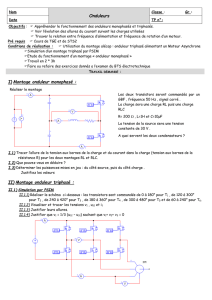
On souhaite commander une machine
asynchrone triphasée
à partir
d’une source de tension constante de
500 V. On utilise à cette fin un ondu-
leur triphasé de telle façon que les
tensions composées entre phases de
la machine, U12, U23 et U31, aient
l’allure de celles de l’écran .
L’onduleur est constitué de trois bras
de transistors et des diodes de protec-
tion contre les surtensions .
Portunus : un simulateur
mécatronique
(seconde partie)
MICHEL OURY [1]
mots-clés
contrôle
et métrologie,
électronique,
logique,
postbac
La modélisation
de la machine
La machine asynchrone, dans Portu-
nus, est définie par un modèle équi-
valent par phase, tel que celui du
tableau
. Les équations caracté-
ristiques qui en découlent sont donc
celles données en
. Portunus est en
anglais, mais il est très facile d’iden-
tifier les résistances statoriques et
rotoriques par phase, les inductances
de fuite (stray signifie littéralement
« parasite ») de flux au stator et au
rotor, ainsi que le couple sur l’arbre
(shaft torque). L’inductance principale
(main inductance) est souvent nommée
inductance de magnétisation, et l’on
constate que cette machine est quasi
parfaite (hormis ses pertes Joule au
stator et au rotor), puisqu’elle n’a pas
de pertes fer.
Seuls les « paramètres » sont
accessibles à l’utilisateur, et on peut
disposer, en sortie, de la vitesse de
rotation et du couple utile sur l’arbre.
Du point de vue mécanique, il n’y
On souhaite définir la stratégie de
commande des transistors de l’ondu-
leur de façon à pouvoir faire varier
la vitesse de la machine asynchrone
entre 0 et sa vitesse nominale de
1 500 tr/min avec plusieurs configura-
tions de couple, et de telle façon que
les tensions composées soient toujours
du type de celles de l’écran .
La machine sera choisie en fonction
des couples de charge et du moment
d’inertie ramené sur l’arbre.
L’onduleur est constitué de trois bras à transistors bipolaires
L’un des intérêts de Portunus est de permettre la mise au point de travaux
pratiques de simulation traitant en totalité la chaîne d’énergie du point de vue
de l’électricien, c’est-à-dire incluant à la fois la machine tournante, sa charge
et sa commande électronique.
Les signaux de mise à l’état ouvert ou fermé des interrupteurs pourront être
simplement générés par les machines d’état inclues dans une boucle de
traitement synchronisée sur une horloge.
Nous vous proposons dans ce second volet d’étudier la mise au point d’un travail
pratique de simulation de la mise en rotation à vitesse variable d’une machine
d’induction grâce à un onduleur à transistors.
Le câblage de la machine triphasée
Les tensions composées aux bornes de la machine

T E C H N O L O G I E M a i - j u i n 2 0 0 7 M a i - j u i n 2 0 0 7 T E C H N O L O G I E
T E C H N O L O G I E M a i - j u i n 2 0 0 7 M a i - j u i n 2 0 0 7 T E C H N O L O G I E
[] Professeur agrégé de génie électrique au
lycée Jean-Perrin de Saint-Ouen-l’Aumône (95).
Courriel : michel.oury@ac-versailles.fr
Dans un premier temps, notre
machine sera configurée selon les
paramètres de l’écran
, et tournera
à vide de charge. Sa seule contrainte
mécanique sera donc son moment
d’inertie J de 0,1 kg . m2.
La modélisation
des semi-conducteurs
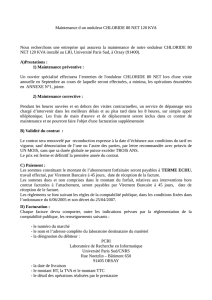
Les transistors seront modélisés à
l’aide de caractéristiques linéarisées,
avec une tension de saturation à l’état
ON de 0,2 V. Leur résistance à l’état
ON (état passant) sera de 0,001 W et
à l’état OFF (état bloqué des diodes)
de 100 kW. Les diodes de protection
seront modélisées avec une carac-
téristique de même type et présen-
teront à l’état passant une chute de
tension de 0,7 V.
Pour obtenir ce résultat, il suffit de
placer sur la feuille de schéma une
caractéristique de type « Equivalent
Line », que l’on nommera seuil, comme
sur l’écran
. Une caractéristique
de même type permettra de définir
les résistances et la tension Vcesat
Les grandeurs caractéristiques
de la machine asynchrone
Les équations dénissant le modèle de fonctionnement d’une machine asynchrone
Les paramètres accessibles
a pas de frottements, et l’on peut
définir le moment d’inertie J de la
machine.
Il est également possible de définir
des valeurs initiales pour les courants
statoriques et rotoriques (dans deux
phases seulement bien évidemment,
puisque le courant dans la troisième
s’en déduira par calcul), la vitesse de
rotation initiale et la position angu-
laire de l’arbre (ce qui est intéressant
dans le cas d’une étude de position-
nement, par exemple).
Lorsque l’on place le schéma de
la machine sur la feuille, on peut
désigner les points visibles, soit les
entrées des trois phases (nommées A,
B, C dans Portunus) et l’arbre. Cette
particularité de Portunus est très
intéressante, puisque l’on dispose
également du modèle d’une source de
couple, que l’on pourra utiliser pour
charger la machine dans une seconde
partie du TP.
On voit donc bien toute la richesse
d’exploitation de ce logiciel qui asso-
cie sur un seul et même schéma, et
de façon très simple, l’électronique de
puissance et les machines électriques
avec leurs charges.

T E C H N O L O G I E M a i - j u i n 2 0 0 7 M a i - j u i n 2 0 0 7 T E C H N O L O G I E
T E C H N O L O G I E M a i - j u i n 2 0 0 7 M a i - j u i n 2 0 0 7 T E C H N O L O G I E
des transistors. On place ensuite une
diode, puis un transistor, et on affecte
à chacun son modèle, seuil ou tran-
sistor, comme sur l’écran . Pour le
moment, on n’aborde pas encore les
états initiaux des transistors TR1,
TR2, etc.
La résistance à l’état bloqué de ces
interrupteurs peut également être
fixée à 500 kW, ou modifiée, comme
c’est le cas sur l’écran .
Il suffit alors de faire du copier-
coller pour dupliquer la diode et le
transistor en 6 exemplaires et abou-
tir au schéma de l’écran .
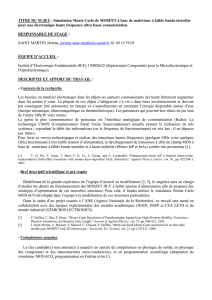
La stratégie
de commande
Le premier travail que l’on va deman-
der aux étudiants est de déterminer
l’état initial dans lequel doivent se
trouver les 6 transistors pour qu’à
l’instant 0 les tensions composées
U12, U23 et U31 soient celles de
l’écran . Par exemple, pour que la
tension U12 soit à E = 500 V à l’ins-
tant 0, il faut que les transistors TR1
et TR5 soient passants.
Cela fait, il sera possible d’indiquer
ces états passants ou bloqués par les
valeurs des informations de Contrôle
(CTRL) et de les porter dans les pro-
priétés des composants (clic droit sur
un composant, puis Propriétés). Les
signaux de contrôle peuvent être : des
sorties de générateurs (par exemple,
SINE1.OUT), des expressions boolé-
ennes (par exemple, U12.V>100 &&
U23.V>50) ou des variables défi-
nies par l’utilisateur. Ces signaux de
contrôle ressemblent donc bougrement
aux réceptivités du Grafcet.
Il ne reste plus qu’à définir la suc-
cession des états passants et blo-
qués des 6 transistors de l’onduleur,
au rythme d’une horloge qui fixera la
vitesse de rotation de la machine.
Ce travail pourra se faire justement
sous forme d’un grafcet, car les règles
de fonctionnement de la machine d’état
de Portunus sont celles du Grafcet.
Seule la représentation des étapes, en
cercle et non en carré, diffère de celle
du Grafcet. Bien entendu la machine
d’état, n’étant pas un grafcet, n’est pas
tenue de suivre les normes de celui-ci,
les différents transistors de l’onduleur,
au rythme de l’horloge. Quant au signal
rectangulaire, il peut être symétrique
ou non en sortie de l’horloge. Nous
avons choisi un signal rectangulaire
classique, variant entre 0 et + 5 V, et
nommé Horloge . Pour obtenir des
tensions triphasées aux bornes de la
machine de fréquence 50 Hz, on peut
soit choisir une horloge de fréquence
300 Hz et définir des réceptivités sur
les fronts montants ou descendants,
soit choisir une horloge à 150 Hz et
retenir pour chaque réceptivité alter-
nativement un front montant et un
front descendant. Les réceptivités
seront donc tantôt Horloge.OUT=5,
tantôt Horloge.OUT=0.
Il est également possible de défi-
nir une étape initiale, pour laquelle
on peut activer certains composants
et à partir de laquelle le séquence-
ment débutera.
Notre grafcet remis en forme de
machine d’état aura donc l’allure de
l’écran .
La caractérisation d’un transistor
Le tracé du signal d’horloge 0/5 V,
de fréquence F = 150 Hz (multiplié par 10 en amplitude)
Le séquencement de la commande de l’onduleur
Les caractéristiques des semi-conducteurs
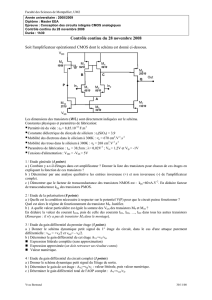
À chaque étape, certains transistors
sont donc rendus passants et d’autres
sont bloqués . À un instant t, pen-
dant la simulation, l’étape active est
marquée d’un pion bleu en son centre ;
les transistors sont distingués par une
flèche d’émetteur rouge s’ils sont pas-
sants, bleue s’ils sont bloqués ; une
diode est rouge lorsqu’elle est pas-
sante, bleue à l’état bloqué.
On peut arrêter temporairement la
simulation à tout instant pour exami-
ner l’état des semi-conducteurs et de
la machine tournante ou de la machine
d’état, puis reprendre la séquence.
L’écran décrit l’état de l’onduleur
au bout de 43 ms : tous les transis-
mais la succession étape-transition est
respectée : les actions activées dans
une étape restent activées tant que
l’on ne dévalide pas l’étape, etc.
Si l’on choisit un générateur d’hor-
loge à la fréquence F, il va être pos-
sible de rendre passants ou bloqués

T E C H N O L O G I E M a i - j u i n 2 0 0 7 M a i - j u i n 2 0 0 7 T E C H N O L O G I E
T E C H N O L O G I E M a i - j u i n 2 0 0 7 M a i - j u i n 2 0 0 7 T E C H N O L O G I E
tors sont bloqués sauf TR3 et TR5, et
la diode D1 est passante.
L’ensemble séquenceur (machine
d’état), onduleur et machine tournante
étant en état de fonctionnement normal,
il est maintenant possible de poser des
questions aux élèves sur les valeurs
des courants et tensions appliqués à
cette machine, ainsi que sur le temps
de montée à la vitesse nominale, aussi
bien à vide qu’en charge.
Aujourd’hui, seuls les transistors
bipolaires sont disponibles, mais,
avec la version 1.4, actuellement
en bêta-test, de nombreux autres
modèles (Mosfet, IGBT…) seront
disponibles.
Le fonctionnement à vide
En fonctionnement à vide, seul le
moment d’inertie total ramené sur
l’arbre de la machine J est pris en
compte dans le calcul du couple d’une
machine parfaitement équilibrée. Une
fois passée la phase de démarrage
pendant laquelle la machine accélère,
on doit donc trouver un couple quasi
nul et une vitesse égale à la vitesse
de synchronisme.
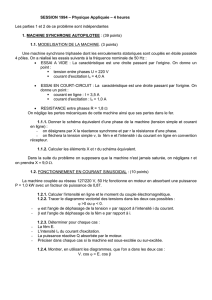
On pourra vérifier que, si la fré-
quence de commande des transistors
diminue (par exemple dans un rapport
de 3, passant de 150 Hz à 50 Hz dans
le séquenceur), la vitesse sur l’arbre
est également divisée dans le même
rapport .
On observe toutefois que la machine
est beaucoup plus instable pendant la
phase transitoire d’accélération au
démarrage, sous sa pleine tension
nominale. D’autres commandes du
séquenceur peuvent donc être imagi-
nées. Il est en effet possible de char-
ger des fichiers de fonctions x(t) dans
La dénition des actions associées aux étapes
L’état du système au bout de 43 ms
À vide, la machine tourne à 1 500 tr/min avec un couple nul sur l’arbre
Si la fréquence du séquenceur est divisée par trois, celle de la machine également
Comment se
procurer le logiciel ?
Portunus est distribué par :
Cedrat
15, chemin de Malacher, Inovallée
38246 Meylan Cedex
Tél. : +33 (0)4 76 90 50 45
Fax : +33 (0)4 56 38 08 30
Courriel : cedrat@cedrat.com
Site :
www.cedrat.com
On peut consulter la présentation
de Portunus à cette adresse :
http://www.cedrat.com/software/
portunus/pdf/Portunus_info_leaflet.pdf

T E C H N O L O G I E M a i - j u i n 2 0 0 7
portant sur les tensions et les cou-
rants instantanés ainsi que sur leur
primitives, dérivées, etc.
En effet, les blocs de calcul, outre
les fonctions mathématiques standard
–
somme différence, multiplication et
division
–
, permettent également l’in-
tégration, la dérivation et la création
d’une fonction de transfert (en s et en z)
par définition des polynômes du numé-
rateur et du dénominateur de celle-ci.
On y trouve également les modules de
limitation, d’hystérésis, d’échantillon-
nage blocage, de gain…
De la même façon, grâce aux élé-
ments d’interaction, il est tout à
fait possible de modifier le rapport
cyclique de l’horloge de commande
au cours du temps de façon à obtenir
une commande MLI. Dans la fenêtre
Modules, il suffit de cocher la case
« User interactions » pour avoir accès
à une nouvelle fenêtre dans laquelle
on peut choisir un afficheur à aiguille,
un curseur potentiométrique (pour
faire varier le rapport cyclique à la
main, par exemple), une horloge à
aiguille, un afficheur à 7 segments,
des interrupteurs, etc.
Il est impossible de décrire ici toutes
les possibilités de ce nouveau logiciel,
qui, s’il tient ses promesses, devrait
encore s’enrichir et s’améliorer dans
sa version 1.4.
La dénition du couple
L’association de la table de variation du couple à la charge en sortie
La construction de la table de variation du couple en fonction du temps
La construction d’un schéma-bloc de calcul
La charge résistante sur l’arbre
une table à deux dimensions, t et x(t),
et de se servir de cette table comme
générateur de fonction.
Le fonctionnement en charge
Pour charger la machine, il suffit de
monter sur l’arbre un couple résistant,
c’est-à-dire une source de couple dont
on définit la valeur (positive) grâce
à la fenêtre des propriétés . On
peut également programmer ce couple
pour qu’il varie en fonction du temps
en associant une variable à chaque
paramètre d’un modèle : il suffit de
créer une fonction temporelle et d’as-
socier sa sortie (OUT) au paramètre
de la source de couple .
En intercalant un multimètre tri-
phasé entre la sortie de l’onduleur et la
machine, on accède à toutes les valeurs
des tensions et des courants ligne.
Ainsi, grâce aux blocs fonctionnels,
on pourra calculer graphiquement
toutes les équations mathématiques
Les contrôles
utilisateur
1
/
5
100%