énoncé

Spé ψ
ψψ
ψ 2012-2013 page 1/4 Devoir n°1
Spé ψ
ψψ
ψ 2012-2013 Devoir n°1
MÉCANIQUE DU POINT
Rappel :
(
)
(
)
(
)
A B C A C B A B C
∧ ∧ = ⋅ − ⋅
.
Partie I
Acquérir plusieurs images d’une même zone à des instants différents
nécessite une bonne maîtrise des trajectoires des satellites. On se propose
d’étudier certains aspects du mouvement d’un satellite (S) par rapport au réfé-
rentiel géocentrique (R
G
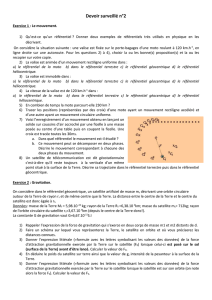
) considéré comme galiléen. Le satellite de masse m,
repéré par un point P est en orbite circulaire de centre O à une altitude h. On
considèrera que la Terre est une sphère homogène de rayon R
T
et de centre O
(voir figure 1).
Données numériques :
constante de gravitation : G = 6,7×10
–11
m
3
⋅kg
–1
⋅s
–2
;
masse de la Terre : M
T
= 6×10
24
kg
;
rayon de la Terre : R
T
= 6400 km.
Les orbites des satellites tels que SPOT et ENVISAT sont des trajectoi-
res circulaires très proches. On considérera dans toute cette partie que leurs altitudes sont identiques
soit h = 800 km. (voir figure 1).
I-1. Exprimer le champ gravitationnel
( )
G P
s’exerçant au point
P
.
I-2. Établir soigneusement la relation entre la période de révolution
T
du satellite et son altitude
h
. Calculer la valeur numérique de
T
.
I-3. En déduire l’expression de la norme de la vitesse
v v
=
en fonction de G,
MT
,
RT
et
h
. Cal-
culer la valeur numérique de
v
.
I-4. Exprimer l’énergie potentielle
EP
du satellite dans le champ de gravité de la terre en fonc-
tion de de G,
MT
,
RT
et
h
.
I-5. En déduire la relation suivante, appelée « théorème du viriel » : 2
EC
+
EP
= 0.
La Terre est entourée d’une atmosphère qui s’oppose au mouvement du satellite. La force de
frottement
f
créée par l’atmosphère est proportionnelle au carré de la vitesse v du satellite et elle
s’exprime par
f m v v
= −α
, où
α
est une constante de valeur positive.
I-6. Déterminer la dimension de α.
I-7. En considérant que, dans ces conditions, le théorème du viriel établi précédemment est
toujours valable, exprimer l’énergie mécanique du satellite
E
et la norme de la vitesse
v
en fonction de
G,
MT
,
RT
et
h
.
I-8. À partir d’un théorème énergétique en déduire que
h
vérifie l’équation différentielle sui-
vante :
( )
T T
2
dh
M R h
dt
= − α +
G.
I-9
.
Un satellite placé sur une orbite d’altitude h = 800 km subit une diminution d’altitude
d’environ 1 m par révolution ; on suppose que sa vitesse est, en norme, peu affectée au bout d’une ré-
volution. En déduire un ordre de grandeur de α (ne pas s’étonner de la petitesse du résultat). Calculer,
avec la même approximation, la perte d’altitude du satellite au bout de 10 ans de fonctionnement.
O
P
h
R
T
figure 1

Spé ψ
ψψ
ψ 2012-2013 page 2/4 Devoir n°1
Le fait d’avoir une augmentation de la vitesse en présence d’une force opposée au mouvement
est-il paradoxal ?
I-10.
D’après les résultats précédents et en considérant le rôle des satellites étudiés, discuter
succinctement du choix de l’altitude de l’orbite pour ces satellites.
Partie II
S
TABILISATION DE L
’
ORBITE D
’
UN SATELLITE
La méthode de stabilisation d’altitude par gradient de gravité a été mise en œuvre pour les sa-
tellites artificiels afin qu’ils présentent vers la Terre toujours le même côté, et puissent observer la
Terre à chaque instant. Elle ne requiert aucune ressource d’énergie embar-
quée.
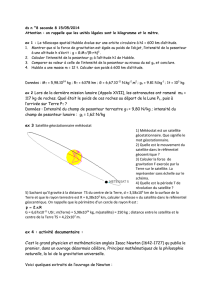
Modèle : le satellite est constitué de deux points matériels M
1
et M
2
de masses identiques m = ½ M
S
reliés par une tige rigide de masse nulle et
de longueur
2
ℓ
. Le barycentre S du satellite décrit autour de la Terre une
orbite circulaire de rayon r
0
= R
T
+ h avec
0
r
ℓ ≪
. Le référentiel géocentri-
que
(
R
G)
lié au repère
(
)
, , ,
O x y z
est supposé galiléen. Le plan orbital est
Oxy . Le référentiel
(
R
’)
défini par le repère
(
)
, ', ',
O x y z
lié au satellite
tourne autour de la Terre avec une vitesse angulaire Ω
(Figure 2).
Les points M
1
et M
2
sont dans le plan orbital :
'
0
x
OS r u
=
,
1
1
1 1
OM r r u
= =
,
2
2
2 2
OM r r u
= =
, où
'
x
u
,
1
u
et
2
u
sont unitaires. On
appelle θ l’angle de M
1
M
2
avec l’axe Ox
’
de
(
R
’).
On cherche à déterminer les éventuelles positions
d’équilibre du satellite dans le référentiel
(
R
’)
et leur stabilité. On suppose qu’il n’y a pas de frotte-
ments.
II-1. Montrer, en appliquant le théorème de la résultante cinétique à
S
, que la troisième loi de
Képler est vérifiée, soit
2
T
3
0
M
r
Ω =
G
.
II-2. Exprimer les forces gravitationnelles
1
F
et
2
F
qui agissent sur
M
1 et
M
2.
II-3. Exprimer dans (
R
’) les forces d’inertie d’entraînement qui agissent sur
M
1 et
M
2 en fonc-
tion de
m
,
Ω
,
1
r
et
2
r
. Exprimer dans (
R
’) les forces d’inertie de Coriolis qui agissent sur
M
1 et
M
2 en
fonction de
m
,
Ω
,
1
SM
,
2
SM
et
d
dt
θ
θ =
ɺ
.
II-4. Montrer que dans (
R
’)
le moment des forces d’inertie de Coriolis en
S
est nul.
II-5. Soit
1
R
et
2
R
les résultantes des forces de gravitation et d’entraînement s’exerçant respec-
tivement sur
M
1 et
M
2. Montrer qu’au premier ordre en
0
/
r
ℓ
, on a
2 1
R R
= −
.
II-6. Établir que dans (
R
’) le moment résultant calculé en
S
des actions extérieures a pour am-
plitude
( ) ( )
2
S T 3
0
6 sin cos
mM r
Γ = θ θ
G
ℓ
, pour
0
r
ℓ ≪
. Préciser la direction et le sens de ce moment ciné-
tique.
II-7. Appliquer le théorème du moment cinétique dans (
R
’). Établir l’équation différentielle du
mouvement. Déterminer les valeurs de
θ
qui correspondent à une position d’équilibre dans (
R
’).
O
y
x
x
’
y
’
r
0
θ
S
M
2
M
1
Ω
t
figure 2

Spé ψ
ψψ
ψ 2012-2013 page 3/4 Devoir n°1
II-8. Faire un développement limité de l’équation du mouvement au voisinage de
θ
= 0. Montrer
que
θ
= 0 est une position d’équilibre stable.
II-9. À partir de la position
θ
= 0, le satellite subit une petite perturbation qui l’écarte d’un angle
θ
0. Calculer la période des oscillations au voisinage de la position d’équilibre, pour un satellite
d’altitude
h
= 800 km. Comparer cette période avec la période du satellite autour de la Terre.
Partie III
S
ATELLITE HELIOSYNCHRONE
Dans cette partie, on retient un autre modèle pour le "géoïde terrestre", as-
similé maintenant à un ellipsoïde de révolution autour de l’axe z’z. L’expression
V(M) du potentiel de gravitation (tel que
(
)
grad
G V
= −
est un développement
limité dont on retiendra seulement les deux premiers termes.
Au potentiel newtonien vu précédemment, s’ajoute une perturbation très
faible dépendant non seulement de r, mais aussi de la latitude
λ
du point M.
Au point M de latitude λ, tel que
OM r
=
, (figure 3),
( ) ( )
( )
22
T T
2
, 1 1 3sin
2
M R
V r r r
λ = − + η − λ
G,
avec : η = 1,083
×
10
–3
; R
T
= 6378 km ; GM
T
= 4,00
×
10
14
SI.
III-1. Exprimer les composantes
r
G
et
G
λ
du champ de gravitation sur la base adaptée
(
)
,
r
u u
λ
.
III-2.
Pour un satellite d’observation, il est intéressant
d’optimiser les visées de toutes les régions de la Terre, par le choix
d’une trajectoire pratiquement circulaire, d’orbite assez basse (altitude
800 km environ) et par les mêmes conditions d’éclairement solaire des
zones observées.
Or, quand le satellite repasse, au terme de quelques jours, à la
verticale d’une cible, le déplacement du Soleil dans sa course appa-
rente autour de O devrait changer son éclairement. Un choix convena-
ble de l’inclinaison
α
de la trajectoire sur le plan équatorial peut
corriger cet inconvénient. En effet, le terme principal
r
G
du champ de
gravitation confère à la trajectoire ses propriétés essentielles (mouve-
ment plan, circulaire), tandis que le terme
G
λ
très faible devant le pré-
cédent, perturbe le mouvement idéal, par une lente évolution des para-
mètres au cours du temps. Si l’on admet l’hypothèse raisonnable (H1)
qu’au cours d’une révolution du satellite, le mouvement reste plan et
circulaire, dans ce modèle, le plan
Π
de l’orbite subit une précession et une nutation lentes, fonction de
son inclinaison
α
sur le plan équatorial de la Terre :
La figure 4
montre le plan équatorial de la Terre et le plan
Π
de l’orbite circulaire de rayon
r
non perturbée. On définit les référentiels et bases vectorielles suivantes :
(
R
G), référentiel galiléen géocentrique des deux modèles de potentiel (sphérique et perturbé),
de base
(
)
1 2 3
, ,
i i i
, où
3
i
est porté par
z’z
,
1
i
et
2
i
étant situés dans le plan équatorial.
u
λ
z
’
z
y
r
u
figure 3
λ
figure 4

Spé ψ
ψψ
ψ 2012-2013 page 4/4 Devoir n°1
(
R
u), référentiel intermédiaire, de base
(
)
1 2 3
, ,
u u i
,
1
u
étant situé à l’intersection du plan
équatorial terrestre et du plan
Π
. On note
(
)
1 1
,i u
= ψ
.
(
R
t), référentiel lié au plan
Π,
de base
(
)
1 2 3
, ,
u t t
, telle que
3
t
est déduit de
3
i
, par rotation
d’angle
α
autour de
1
u
:
α
est l’angle d’inclinaison de
Π
sur le plan équatorial de la Terre.
précession : mouvement dans
R
G du vecteur
1
u
autour de
3
i
.
nutation : mouvement dans
R
G du vecteur
3
t
autour de
1
u
.
À cause de la perturbation, la base de
R
t est en mouvement de vecteur rotation
Ω
par rapport à
R
G, et
1
u
tourne autour de
3
i
à la vitesse angulaire
d
dt
Ψ
. Selon (
H
1), le mouvement du satellite
S
dans
R
t est circulaire uniforme et on note
(
)
1
,
u OM
ϕ =
.
a) Exprimer
Ω
en fonction de
d
dt
Ψ
et
d
dt
α
.
b) Selon (
H
1) quelle est, dans la base
(
)
1 2 3
, ,
u t t
, l’expression du moment cinétique
(
)
,
t
O
M
σ
R
du satellite
M
(point matériel de masse
m
), calculé en
O
, dans le référentiel (
R
t) ? Montrer
que
(
)
(
)
G
, ,
t
O O
M M
σ ≈ σ
R R
dans l’hypothèse (
H
2) où
d d
dt dt
ϕ α
≫
et
d d
dt dt
ϕ ψ
≫
.
c) Donner à l’aide des vecteurs
r
u
et
u
λ
l’expression vectorielle du théorème du mo-
ment cinétique
appliqué en
O
, dans le référentiel
R
G, au satellite
M
.
d) En tenant compte de (
H
1) et (
H
2), montrer que
( ) ( )
G
G
G
,
,
O
O
d M
OM M
dt
σ= ∧ σ
R
R
R
.
e) En déduire que :
( )
( )
(
)
G
3
3 3
,O
mG t u M OM
t t
λ
λ
⋅
Ω − ⋅Ω = σ
R
.
III-3.
Pour la suite du problème, on admet les relations suivantes :
(
)
(
)
(
)
sin sin sin
λ = α ϕ
et
(
)
(
)
3
cos / cos
t uλ
⋅ = α λ
.
La perturbation
G
λ
(et par suite
Ω
) étant très faible, on recherche la valeur moyenne
Ω
de
Ω
sur une période où
ϕ
varie de 0 à 2
π
.
a)Montrer que
1
0
u
Ω ⋅ =
. Interpréter ce résultat.
b) En projetant la relation III-2-e sur
3
i
, montrer que
( )
2T
T7
3cos
2
Md R
dt r
ψ
= − η α
G
,
avec
r OM
=
.
c) On impose alors à l’inclinaison α du plan Π une valeur telle que le mouvement de précession
du vecteur
1
u
autour de
3
i
a pour vitesse angulaire la vitesse apparente de rotation du soleil dans le repère géo-
centrique. Quel est son ordre de grandeur numérique ? Montrer qualitativement que cette condition répond à une
des exigences demandées aux satellites d’observation. Écrire l’équation dont α est solution. Calculer numéri-
quement α pour h = 800 km et
[
]
0,
α ∈ π
. Conclusion ?
1
/
4
100%