Dégénérescences de structures projectives complexes sur les

D´eg´en´erescences de structures projectives complexes
sur les surfaces, d’apr`es D. Dumas
Fr´ed´eric Paulin
4 f´evrier 2012
R´esum´e
Le but de ces notes est d’exposer les jolis r´esultats de David Dumas [Dum2] sur les
d´eg´en´erescences de structures projectives complexes sur les surfaces, avec une pinc´ee
de topologie de Gromov ´equivariante.
1 Structures projectives complexes sur les surfaces
Un excellent survol concernant cette partie est [Dum1].
Soient Σgune surface (r´eelle, lisse) compacte connexe orientable de genre g≥2 et
e
Σg→Σgun revˆetement universel de Σg, de groupe des automorphismes de revˆetement 1
Γ (muni de la topologie discr`ete).
1.1 D´efinitions
Rappelons que le groupe de Lie complexe PSL2(C) = SL2(C)/{±id}agit fid`element
et holomorphiquement sur la droite projective complexe P1(C) = C∪ {∞} par les ho-
mographies z7→ az+b
cz+d, et que le stabilisateur de l’ouvert H={z∈C: Im z > 0}est
PSL2(R) = SL2(R)/{±id}.
Une structure projective complexe sur une surface Sest une (G, X)-structure sur So`u
X=P1(C) et G= PSL2(C), c’est-`a-dire un atlas maximal de cartes de S`a valeurs dans X
dont les applications de changement de cartes sont des (restrictions d’)´el´ements de G. Un
isomorphisme de structures projectives complexes est un hom´eomorphisme qui envoie atlas
sur atlas par pr´ecomposition. En particulier, le groupe des hom´eomorphismes de Sagit (`a
droite) sur l’ensemble des structures projectives complexes sur Spar pr´ecomposition des
cartes.
Pour toute structure projective complexe sur Σg, il existe un couple (D, ρ) o`u ρ:
Γ→PSL2(C) est un morphisme de groupes, appel´ee sa (repr´esentation d’)holonomie et
1. La bonne mani`ere de d´efinir un groupe fondamental, mˆeme si le choix de point base est remplac´e
par un choix de revˆetement universel !
1

D:e
Σg→P1(C) est une immersion ρ-´equivariante 2, qui est localement un isomorphisme
de structures projectives complexes, appel´e son application d´eveloppante. Par analycit´e,
l’application d´eveloppante Dd´etermine la repr´esentation d’holonomie ρ, mais il est utile
pour cette exposition de mettre en avant le couple (D, ρ). Ce couple est uniquement d´efini
modulo l’action de PSL2(C) o`u g∈PSL2(C) agit par (D, ρ)7→ (D◦g, gρg−1). Voir par
exemple [Thu] pour ces notions.
Nous noterons CP1(Σg) le quotient de l’ensemble des structures projectives complexes
sur Σgpar le groupe Diff0(Σg) des isotopies 3de Σg. Ainsi CP1(Σg) est identifi´e `a l’ensemble
des classes de couples (D, ρ) o`u ρ: Γ →PSL2(C) est un morphisme de groupes et D:
e
Σg→P1(C) est une immersion ρ-´equivariante, modulo l’action de PSL2(C) d´efinie par
g·(D, ρ)=(D◦g, gρg−1). Nous noterons [D, ρ] la classe de (D, ρ). Nous munirons CP1(Σg)
de la topologie quotient de la topologie produit des topologies compactes-ouvertes.
Notons T(Σg)l’espace de Teichm¨uller de Σg, c’est-`a-dire le quotient de l’ensemble
des structures de surface de Riemann sur Σgpar le groupe des isotopies de Σg, muni de
la topologie quotient de la topologie C∞sur les sections du fibr´e des endomorphismes
du fibr´e tangent r´eel de Σg(donn´ees par les multiplications par i). Nous noterons [X] la
classe dans T(Σg) d’une structure de surface de Riemann Xsur Σg. Puisque les homogra-
phies sont holomorphes, toute structure projective complexe sur une surface Sd´efinit une
structure de surface de Riemann sur S, dite sous-jacente. D’o`u une application continue
d’affaiblissement de structure
CP1(Σg)→T(Σg).
Si Xest une structure de surface de Riemann sur Σg, nous noterons CP1(X) la fibre
au-dessus de [X] pour cette application.
Le groupe modulaire 4Mod(Σg) = Diff+(Σg)/Diff0(Σg) de Σgagit naturellement (`a
droite) sur CP1(Σg) et sur T(Σg) par passage au quotient des pr´ecompositions de struc-
tures. L’application d’affaiblissement de structure ci-dessus est Mod(Σg)-´equivariante, et
admet une section continue ´equivariante dite fuschienne, par le th´eor`eme d’uniformisation
(en uniformisant par le disque les structures complexes sur Σg).
Apr`es avoir introduit les objets utiles, nous allons donner un param´etrage de l’espace
CP1(Σg), qui montrera en particulier qu’il est hom´eomorphe `a R12g−12.
1.2 Diff´erentielles quadratiques holomorphes
Nous renvoyons par exemple `a [Abi, Gar, Nag, Hub] pour le contenu de cette partie.
Soit Yune surface de Riemann. Une diff´erentielle quadratique holomorphe sur Yest
une section holomorphe φdu fibr´e vectoriel holomorphe K2
Ydes 2-formes holomorphes sur
Y, c’est-`a-dire la donn´ee pour toute carte locale (U, z) de Yd’une application holomorphe
φU,z :U→Ctelle que si (V, w) est une autre carte locale, alors φV,w (w)dw2=φU,z(z)dz2
sur U∩V. Nous noterons par abus encore φl’application φU,z pour toute carte locale
(U, z) de Y.
2. Si Eet Fsont deux ensembles munis d’une action d’un groupe G, une application f:E→Fest dite
G-´equivariante (ou ρ-´equivariante si ρ:G×F→Fest l’action de Gsur F) si pour tous les x∈Eet g∈G,
nous avons f(gx) = gf (x). Si l’action de Gsur Fest triviale, nous dirons aussi que fest G-invariante
3. Une isotopie de Σgest un diff´eomorphisme de Σgisotope `a l’identit´e (ou, de mani`ere ´equivalente,
homotope `a l’identit´e, ou encore, agissant par conjugaisons sur les groupes fondamentaux de Σg).
4. “Mapping class group” en langue anglo-saxonne.
2

Si Yest compacte connexe de genre g, le th´eor`eme de Riemann-Roch implique que la
dimension de l’espace vectoriel complexe Q(Y) des diff´erentielles quadratiques holomor-
phes sur Yest 3g−3. Cet espace vectoriel est alors muni d’une norme naturelle
kφk=ZY|φ|,
car dans une carte locale, |φ|=|φ(z)||dz2|est proportionnelle `a la mesure de Lebesgue de
la carte.
Une diff´erentielle quadratique holomorphe sur la surface lisse Σgest la donn´ee d’une
structure de surface de Riemann Xsur Σget d’une diff´erentielle quadratique holomorphe
φsur X. Le groupe des diff´eomorphismes de Σgagit naturellement sur l’ensemble des
diff´erentielles quadratiques holomorphes sur Σg. Nous noterons Q(Σg) le quotient de cet
ensemble par le groupe Diff0(Σg) des isotopies de Σg, muni de la topologie quotient de la
topologie produit des topologies compactes-ouvertes. La premi`ere projection (X, φ)7→ X
induit une application d’oubli continue Mod(Σg)-´equivariante
Q(Σg)→T(Σg).
Les espaces Q(Σg) et T(Σg) admettent (voir par exemple [Gar, Nag, Hub]) des structures
de vari´et´es holomorphes, pour lesquelles le groupe Mod(Σg) agit par biholomorphismes,
qui font de l’application d’oubli ci-dessus un fibr´e vectoriel holomorphe, la fibre au-dessus
de [X]∈T(Σg) ´etant Q(X). Puisque l’espace de Teichm¨uller est hom´eomorphe `a R6g−6
(voir par exemple [FLP]), l’espace topologique Q(Σg) est hom´eomorphe `a R12g−12.
Nous aurons besoin de propri´et´es g´eom´etriques des diff´erentielles quadratiques holo-
morphes. Fixons dans la fin de cette partie un ´el´ement φ∈Q(Y) non nul. En particulier,
l’ensemble φ−1(0) de ses z´eros est discret (donc fini si Yest compacte).
Si x0∈Yn’est pas un z´ero de φ, alors il existe 5une carte locale (U, z) de la surface
de Riemann Yau voisinage de x0telle que z(x0) = 0 et φ=dz2sur U. Une telle
carte locale est uniquement d´efinie modulo l’action du groupe des z7→ ±z+z0. Ainsi φ
d´efinit une structure de surface de demi-translation sur Y−φ−1(0), c’est-`a-dire un atlas
maximal de cartes holomorphes de Ydont les applications de changement de cartes sont
(des restrictions d’applications) de la forme z7→ ±z+z0. Nous renvoyons par exemple
`a [Mas, Zor, GL] pour plus d’informations sur les surfaces de demi-translation. Puisque
ces transitions de cartes pr´eservent la m´etrique euclidienne, ceci munit Y−φ−1(0) d’une
structure plate (d’une m´etrique riemannienne `a courbure sectionnelle constante nulle). La
norme kφkest ´egale `a l’aire riemannienne totale de cette structure plate.
Si x0∈Yest un z´ero d’ordre k≥1 de φ, alors il existe une carte locale (U, z) de
la surface de Riemann Yau voisinage de x0telle que z(x0) = 0 et φ(z) = zkdz2. La
surface plate Y−φ−1(0) admet ainsi une singularit´e conique d’angle (k+ 2)πen x0. Nous
noterons dφla distance sur Yd´efinie par cette structure plate `a singularit´es coniques
(borne inf´erieure des longueurs euclidiennes des chemins entre deux points qui sont C1
par morceaux et ne passent qu’un nombre fini de fois par les singularit´es). Notons que
pour tout t > 0, nous avons
dtφ =√t dφ.(- 1 -)
5. Dans une carte locale (V, w) en x0, ´ecrire φ=φ(w)dw2, choisir une d´etermination de √φsur un
voisinage ouvert connexe Ude x0, et poser z(x) = Rx
x0pφ(w)dw pour tout x∈U.
3

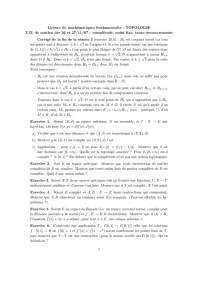
Petit apart´e sur les feuilletages mesur´es. Un feuilletage mesur´e d’une surface est
un feuilletage Fde dimension 1 de cette surface priv´ee d’une partie discr`ete A, muni
d’une mesure transverse µ, c’est-`a-dire pour tout arc transverse Ide Fd’une mesure
µIsur I, de support total et sans atome, qui sont invariantes par le pseudo-groupe
d’holonomie transverse (si h:I→Jest une application d’holonomie entre deux arcs
transverses, alors h∗µI=µJ, voir le dessin de gauche ci-dessous), `a singularit´es de
type selle `a au moins 3 branches en tout point de A(voir le dessin de droite ci-dessous).
Fh(y)
h(x)
xI
y
J
Les transformations z7→ ±z+z0pr´eservent les droites horizontales. Les cartes locales
de la structure de surface de demi-translation d´efinissent donc, en prenant les images
r´eciproques des droites horizontales, un feuilletage de dimension 1 de Y−φ−1(0), dont les
feuilles locales sont les composantes connexes des courbes d’´equation Im z=cpour c∈R,
qui en tout z´ero d’ordre k≥1 de φadmet une singularit´es de type selle `a k+ 2 branches.
Les transformations z7→ ±z+z0pr´eservent les mesures de Lebesgue sur les droites
verticales. Tout arc transverse au feuilletage par droites horizontales de R2peut ˆetre
d´ecoup´e en un nombre fini de sous-arcs que l’on peut pousser par holonomie le long des
feuilles sur un arc vertical. Les cartes locales (U, z) de la structure de demi-translation
d´efinissent donc une mesure transverse µφpour ce feuilletage : si c: [0,1] →Uest un
chemin transverse par morceaux, d’image contenue dans U, sa mesure transverse est
Z1
0Imz◦c(t)dt .
Nous noterons (Fφ, µφ) ou Fφpar abus ce feuilletage mesur´e, que nous appellerons le
feuilletage horizontal de φ. Notons que pour tout t > 0, nous avons
(Ftφ, µtφ)=(Fφ,√t µφ).(- 2 -)
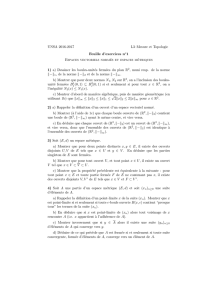
Nous noterons MFgl’ensemble des classes d’´equivalence de feuilletages mesur´es de Σg
pour la relation d’´equivalence engendr´ee par l’action des isotopies et des mouvements de
Whitehead d’´ecrasements de connexions de selle ou leurs inverses (bien d´efinies `a isotopie
pr`es, voir le dessin ci-dessous). Nous le munissons de la topologie quotient de la topologie
C∞des feuilletages et la topologie vague (faible-´etoile) des mesures transverses. Nous
renvoyons par exemple `a [Gar] pour le r´esultat suivant, qui dit qu’`a structure complexe
sous-jacente fix´ee, une diff´erentielle quadratique holomorphe non nulle est caract´eris´ee par
son feuilletage horizontal.
4

s−s
s+
Th´eor`eme 1.1 (Hubbard-Mazur) Soit Xune structure de surface de Riemann sur
Σg. L’application de Q(X)−{0}dans MFgd´efinie par φ7→ Fφest un hom´eomorphisme.
1.3 D´eriv´ee schwarzienne et param´etrage de CP1(Σg)par Q(Σg)
La d´eriv´ee schwarzienne d’une immersion holomorphe entre surfaces de Riemann est
son obtruction `a ˆetre localement projective (voir la jolie introduction [OT2] et [OT1] pour
une excellente pr´esentation). Elle est fondamentale en analyse complexe (par exemple pour
d´efinir la structure de vari´et´e holomorphe de l’espace de Teichm¨uller, voir [Gar, Nag, Hub],
pour l’uniformisation, voir l’excellent livre d’auteur multic´ephale [Sai], et pour d’autres
aspects des fonctions univalentes, voir [Leh]) et en syst`emes dynamiques (en version r´eelle)
[BM, dMvS, KS].
Soient Ω un ouvert de Cet f: Ω →P1(C) une application holomorphe localement
injective. La d´eriv´ee schwarzienne de fest la diff´erentielle quadratique holomorphe sur Ω
d´efinie par
Sf=f00(z)
f0(z)0−1
2f00(z)
f0(z)2dz2.
Cette formule n’est pas tellement importante (sauf pour la r´esolution de l’´equation diff´e-
rentielle schwartzienne Sf=φ), les propri´et´es fondamentales de la d´eriv´ee schwarzienne
sont les suivantes, o`u fet gsont holomorphes localement injectives :
•la d´eriv´ee schwarzienne est l’obtruction `a ˆetre localement projective : Sf= 0 si et
seulement si fest localement restriction d’homographies ;
•la d´eriv´ee schwarzienne v´erifie la propri´et´e de cocycle
S(f◦g) = g∗(Sf) + Sg .
Soit Xune structure de surface de Riemann sur Σg, notons e
Xla structure de surface de
Riemann relev´ee sur e
Σg, identifi´ee 6par exemple (par uniformisation) au demi-plan ouvert
sup´erieur Hde C. Si D:e
X→P1(C) est une repr´esentation d’holonomie d’une structure
projective complexe sur Σgde structure complexe sous-jacente X(qui est donc holomorphe
localement injective), de repr´esentation d’holonomie ρ, alors SDest une diff´erentielle
quadratique holomorphe sur e
X, invariante par l’action de Γ : par les deux propri´et´es
pr´ec´edentes, puisque γ∈Γ agit par homographies sur e
Xet ρ(γ) par homographies sur
P1(C), nous avons
γ∗(SD) = S(D◦γ) = S(ρ(γ)◦D) = SD .
Donc e
φ=SDpasse au quotient en une diff´erentielle quadratique holomorphe φ= [SD]
sur X. La classe d’isotopie de celle-ci ne d´epend pas du choix du repr´esentant (D, ρ) dans
6. Le choix d’une identification, bien d´efinie modulo homographie, est indiff´erent par les propri´et´es
ci-dessus de la d´eriv´ee schwarzienne
5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
1
/
29
100%