De Thalès à Perron Frobenius

Journal de Math´
ematique des ´
el`
eves •Septembre 2015 •Vol. 2
DE THAL `
ES `
A PERRON-FROBENIUS
MATTHIEU DUSSAULE
R´
esum ´
e. Dans cet article, on s’int´
eresse au th´
eor`
eme de Perron-Frobenius pour
les matrices positives et transitives. On donnera une preuve de ce th´
eor`
eme qui
s’appuie sur des propri´
et´
es g´
eom´
etriques ´
el´
ementaires. On introduira pour cela
la distance de Hilbert sur les convexes. Cette preuve a ´
et´
e publi´
ee initialement
par Garrett Birkhoff dans [3]. Le th´
eor`
eme de Perron-Frobenius a de nombreuses
applications, notamment en rapport avec les chaˆ
ınes de Markov. On trouve donc
des applications en probabilit´
es ou encore en syst`
emes dynamiques. Pour plus de
pr´
ecisions sur des applications dans les syst`
emes dynamiques, on pourra consul-
ter par exemple les notes de cours d’Yves Benoist et Fr´
ed´
eric Paulin [1] dans
lesquelles j’ai trouv´
e cette preuve.
On consid`
ere dans tout cet article une matrice carr´
ee A= (ai,j)i,jde taille n×n
de coefficients ai,jtous positifs ou nuls.
D´efinition. On dit qu’une telle matrice Aest transitive s’il existe un entier ktel
queles coefficients de Aksont tous strictement positifs.
Le but de cet article est de d´
emontrer le th´
eor`
eme suivant :
Th´eor`eme (Perron-Frobenius).Soit A une matrice transitive. Alors elle poss`ede un
vecteur propre vA`a coefficients strictement positifs et tout vecteur propre `a coefficients
positifs ou nuls est proportionnel `a vA. D’autre part la valeur propre associ´ee `a vAest la
plus grande valeur propre de A en module et elle est simple.
1. La distance de Hilbert sur les convexes
On notera dans cette section Ωun domaine convexe de Rnrelativement com-
pact, ou plus g´
en´
eralement un domaine convexe d’un espace vectoriel r´
eel, de
dimension finie ou non et qui ne contient pas de demi-droite. Si Aet Bsont des
points distincts de Ω, la droite passant par Aet Bintersecte la fronti`
ere de Ωen
deux points qu’on note Uet Vde sorte que U,A,B,Vsont align´
es dans cet ordre.
On choisit alors une coordonn´
ee affine sur la droite (A,B)et on note u,a,b,vles
coordonn´
ees de U,A,B,V. On d´
efinit alors
d(A,B) = Log (v−a)(u−b)
(u−a)(v−b)
et si Aet Bsont confondus, on pose d(A,B) = d(A,A) = 0.
Dans le quotient qui d´
efinit d(A,B), il n’y a que des diff´
erences au num´
erateur
et au d´
enominateur. Cette d´
efinition ne d´
epend donc pas du choix de la coor-
donn´
ee affine sur la droite (A,B). On note [A,B,V,U]et on appelle birapport de
ces quatre points la quantit´
e(v−a)(u−b)
(u−a)(v−b).
En fait, comme on va le voir, [A,B,V,U]est invariant par toute transformation
de la droite projective (A,B)t{∞}et donc la d´
efinition de dne fait pas non plus
1

Journal de Math´
ematique des ´
el`
eves •Septembre 2015 •Vol. 2
intervenir de m´
etrique ambiante sur Rncomme le remarque Pierre de la Harpe
dans [5].
Propri´et´e (Hilbert).Avec les notations pr´
ec´
edentes, dest une distance sur Ω,
appel´
ee distance de Hilbert.
La seule difficult´
e est l’in´
egalit´
e triangulaire. La preuve est faite en d´
etail dans
[5]. Elle provient essentiellement de la propri´
et´
e suivante, qu’on r´
eutilisera plus
tard.
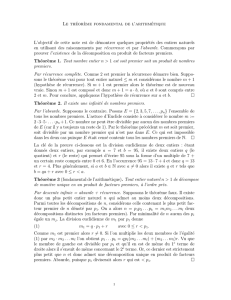
Propri´et´e (Invariance du birapport par une perspective).Soient A,B,Cet D
quatre points align´
es sur une mˆ
eme droite D. Soit Oun point qui n’appartient pas
`
aDet soit D0une droite qui coupe la droite (O,A)(respectivement (O,B),(O,C)
et (O,D)) en A0(respectivement B0,C0et D0). Alors [A,B,C,D]=[A0,B0,C0,D0].
O
DABCD
D0
A0B0C0D0
Figure 1
D´emonstration. Si le point Oest `
a l’infini, alors les quatre droites (A,A0),(B,B0),
(C,C0)et (D,D0)sont parall`
eles, donc soit les droites Det D0sont parall`
eles
et dans ce cas les quadrilat`
eres de sommets A,A0,B,B0,C,C0,D,D0sont des pa-
rall´
elogrammes, soit elles ne le sont pas. On note alors O0leur intersections et on
applique Thal`
es dans les triangles O0AA0O0BB0O0CC0et O0DD0:
DABCD
A0
B0
C0
D0
O0
D0
Figure 2
On supposera maintenant que On’est pas `
a l’infini. Si Det D0sont parall`
eles,
alors le r´
esultat d´
ecoule `
a nouveau directement du th´
eor`
eme de Thal`
es donc on
les suppose concourantes et on est ramen´
e`
a la figure 1. On trace les parall`
eles `
a
(A,A0)qui passent par Bet B0et on note M,N,M0et N0leurs intersections avec
les droites (C,C0)et (D,D0).
2

Journal de Math´
ematique des ´
el`
eves •Septembre 2015 •Vol. 2
O
DABCD
D0
A0B0C0D0
M
N
M0
N0
Figure 3
On applique alors le th´
eor`
eme de Thal`
es dans les triangles OAC et OAD, et
on obtient CA
CB =OA
BM et DA
DB =OA
NB soit [A,B,C,D] = MB
NB . On obtient de mˆ
eme
[A0,B0,C0,D0] = M0B0
N0B0. Enfin en appliquant le th´
eor`
eme de Thal`
es dans le triangle
OBN, on obtient justement MB
NB =M0B0
N0B0, soit [A,B,C,D]=[A0,B0,C0,D0].
Remarque 1.1.La d´
emonstration qu’on a donn´
e est accessible au lecteur qui n’a ja-
mais entendu parler de g´
eom´
etrie projective, mais n’est sans doute pas la meilleure
possible puisqu’elle n’´
evite pas les cas de figure (alors que la propri´
et´
e´
enonc´
ee
est justement de nature projective). On a utilis´
e`
a r´
ep´
etition le th´
eor`
eme de Thal`
es
qui ´
enonce en fait la mˆ
eme chose dans une situation affine. D’ailleurs, dans [2]
(au chapitre 6), Marcel Berger d´
eduit le th´
eor`
eme de Thal`
es de cette propri´
et´
e
sur le birapport et c’est une meilleure fac¸on de proc´
eder. On pourra consulter
cet ouvrage et plus pr´
ecis´
ement le chapitre 6, paragraphe 5 pour plus de d´
etails
sur le birapport et la g´
eom´
etrie projective. La lecture du chapitre sur les formes
quadratiques et la g´
eom´
etrie ´
el´
ementaire de [4] est ´
egalement tr`
es instructive `
a ce
propos.
On revient au convexe Ωet on note Ωson adh´
erence. Une face de Ωest un
sous-ensemble Fde Ωtel que si pet qsont deux points de Ωet si ]p,q[intersecte
F, alors [p,q]⊂F. On dit que Ωest strictement convexe si les faces propres de son
adh´
erence (distinctes de l’ensemble vide et de Ωtout entier) sont r´
eduites `
a des
points. Dans [5], il est prouv´
e que si Ωest strictement convexe, il est g´
eod´
esique
pour la distance de Hilbert. Plus pr´
ecis´
ement, si pet qsont deux points distincts
de Ω, alors il existe un unique segment g´
eod´
esique entre pet qet il s’agit du
segment affine [p,q].
On remarque enfin que dans le cas particulier o`
uΩest le disque unit´
e ouvert
dans le plan complexe, la distance de Hilbert est `
a un facteur pr`
es la distance
hyperbolique dans le mod`
ele de Klein [6].
2. Une preuve g ´
eom ´
etrique du th´
eor `
eme
2.1. L’application fA.On commence par montrer qu’on peut supposer que la
matrice Aa tous ses coefficients strictement positifs. En effet c’est le cas pour Ak
3

Journal de Math´
ematique des ´
el`
eves •Septembre 2015 •Vol. 2
puisque Aest transitive. Soit alors vun vecteur propre qui satisfait les conclu-
sions du th´
eor`
eme pour Ak, alors Av est encore un vecteur propre de Ak,`
a co-
efficients positifs, donc est proportionnel `
av. Ainsi, vest un vecteur propre de
A`
a coefficients strictement positifs. D’autre part, si west un vecteur propre de
A`
a coefficients positifs, c’est un vecteur propres de Ak, donc il est proportionnel
`
av. Ainsi vconvient pour A. Comme les coefficients de Asont positifs, ceux de
Av le sont aussi, donc si on note λla valeur propre associ´
ee `
avpour A, on a
n´
ecessairement λ≥0. Puis Av =λvdonc Akv=λkvet plus g´
en´
eralement si
µest une valeur propre pour A,µkest une valeur propre pour Ak, ce qui suffit
pour avoir que λest simple pour Aet qu’elle est la plus grande valeur propre de
Aen module.
On prouve maintenant la premi`
ere partie du th´
eor`
eme, c’est-`
a dire l’existence
de v. On consid`
ere pour cela un domaine convexe particulier : le simplexe stan-
dard de Rn(on rappelle que nest la taille de la matrice A). Intuitivement il
s’agit du t´
etra`
edre de dimension n−1. On le d´
efinit combinatoirement comme
l’ensemble
∆n={(x1, ..., xn)∈Rn,xi≥0, x1+.... +xn=1}.
En dimension 1 c’est un point, en dimension 2 un segment, en dimension 3 un
triangle, en dimension nun t´
etra`
edre de dimension n−1.
•
• •
•
•
Figure 4
Toute demi-droite positive (demi-droite vectorielle de vecteur directeur positif)
intersecte ∆nen un unique point. `
A pr´
esent, si x∈∆n, alors Ax est `
a coefficients
strictement positifs, donc la droite RAx intersecte ∆nen un point qu’on note
fA(x).
Puisque Aest continue, fAest continue. Mieux, l’application A:x7→ RAx
est lisse de ∆ndans P(Rn). L’application fAest aussi continue pour la distance
de Hilbert. Une premi`
ere mani`
ere de le voir est de constater que la d´
efinition du
birapport ne fait intervenir que des distances euclidiennes. En fait, on va montrer
que pour cette distance, fAest 1-lipschitzienne ce qui assurera directement la
continuit´
e. Enfin, fAest continue pour la m´
etrique euclidienne au d´
epart et la
m´
etrique de Hilbert `
a l’arriv´
ee . `
A nouveau pour montrer ceci on remarque que
la d´
efinition du birraport ne fait intervenir que des distances euclidiennes. En
particulier, on va s’en servir, fA(∆n)est un compact de ∆npour la m´
etrique de
Hilbert.
2.2. Le vecteur propre du th´eor`eme obtenu comme point fixe de fA.On note
`
a pr´
esent que d’apr`
es l’invariance par perspective, l’application fAconserve le
birraport. En effet, soient X,Y,Z,Wquatre points align´
es, alors AX,AY,AZ,AW
sont aussi align´
es, et puisque Aest lin´
eaire, en choisissant n’importe quel syst`
eme
4

Journal de Math´
ematique des ´
el`
eves •Septembre 2015 •Vol. 2
de coordonn´
ees affines, [AX,AY,AZ,AW] = [X,Y,Z,W]. Puis on obtient fA(X)
en projetant AX sur ∆nselon la droite (O,AX), et de mˆ
eme pour Y,Zet Wdonc
d’apr`
es la section pr´
ec´
edente, [AX,AY,AZ,AW]=[fA(X),fA(Y),fA(Z),fA(W)].
Soient alors X6=Y∈∆n. On note Uet Vles points de ∂∆ntels que U,X,Y,V
soient align´
es dans cet ordre et U0et V0ceux tels que U0,fA(X),fA(Y),V0soient
align´
es dans cet ordre. Alors comme les distances fA(X)fA(U)(respectivement
fA(X)fA(V),fA(Y)fA(U),fA(Y)fA(V)) sont strictement plus petites que fA(X)U0
(respectivement fA(X)V0,fA(Y)U0,fA(Y)V0) et que fAconserve le birapport,
d(fA(X),fA(Y)) <d(X,Y).
UXYV
U0
fA(U)
fA(X)
fA(Y)
fA(V)
V0
××
××××
Figure 5
On note `
a pr´
esent qu’un vecteur propre de A`
a coefficients positifs est exacte-
ment un point fixe de fA. Un tel point fixe, s’il existe, est n´
ecessairement dans
le compact fA(∆n)de ∆n. On consid`
ere un vecteur v0qui minimise la fonc-
tion d(v,fA(v)), continue sur fA(∆n), et on suppose que v06=fA(v0), alors
d(fA(v0),fA(fA(v0))) <d(v0,fA(v0)) ce qui est absurde par minimalit´
e, d’o `
u
l’existence d’un point fixe. L’unicit´
e provient de d(fA(X),fA(Y)) <d(X,Y)si
X6=Y´
egalement.
2.3. Fin de la preuve. Il reste `
a montrer que la valeur propre associ´
ee `
avAest
simple et de module maximal. Notons la λAet proc´
edons par l’absurde. Alors,
en utilisant la r´
eduction de Jordan, on obtient un sous-espace V, stable par A, de
dimension r´
eelle 2 ou 3, contenant vA, et tel que dans une base d´
ebutant par vA,
la matrice As’´
ecrit de l’une des trois formes suivantes :
λA0
0λ,λA1
0λ,
λA0 0
0λcosθ−λsinθ
0λsinθ λcosθ
avec λA≤ |λ|. Consid´
erons alors C, l’ensemble des vecteurs `
a coefficients positifs
de Rn. C’est un sous-ensemble de Rnstable par somme et par multiplication par
un r´
eel positif (i.e. un cˆ
one), convexe et ferm´
e. Il ne contient pas de droite vecto-
rielle (on dit qu’il est saillant). Il a pour sommet l’origine de Rnet vAest dans
son int´
erieur. Enfin, son image par Aest contenue dans ˚
CS{0}. Son intersection
avec Vdevrait avoir les mˆ
emes propri´
et´
es. Dans les trois cas ci-dessus, la forme
de la matrice Aempˆ
eche l’existence d’un tel cˆ
one de V.
5
 6
7
8
6
7
8
1
/
8
100%