Mécanique appliquée

CFA EN49
1/7
49800 Brain sur l’Authion
Positionnement
Mécanique appliquée
Positionnement de mécanique appliquée
1. Première partie : Les outils de la Mécanique Appliquée
1.1. Un des outils mathématiques les plus utilisé dans le cadre de la mécanique appliquée
est le vecteur Quelles sont les quatre caractéristiques qui définissent un vecteur ?
…………………………………………………………………………………………………….
…………………………………………………………………………………………………….
…………………………………………………………………………………………………….
…………………………………………………………………………………………………….
1
1.2. Quelle est l’unité légale d’un moment ?
(cochez la bonne réponse)
_ Le kilogramme force (Kg.f)
_ Le Newton mètre (N.m)
_ Le Newton par mètre (N /m)
_ le temps (en secondes)
5.0
1.3. Soit le point A de coordonnées (3 ; 5 ; 0) et le point B de coordonnées (2 ; -1 ; 3) dans
un repère (0 ;x ;y ;z)
• Calculer les coordonnées du vecteur
AB
.
…………………………………………………………………………………………………….
…………………………………………………………………………………………………….
…………………………………………………………………………………………………….
• Calculer la norme du vecteur
AB
.
…………………………………………………………………………………………………….
…………………………………………………………………………………………………….
…………………………………………………………………………………………………….
…………………………………………………………………………………………………….
1
1

CFA EN49
2/7
49800 Brain sur l’Authion
Positionnement
Mécanique appliquée
2. Deuxième partie : Etude Statique
2.1. Le principe fondamental de la statique permet l’étude :
_ Des solides en équilibre
_ Des solides en mouvement
_ Des solides déformables
_ Des matériaux des solides
5.0
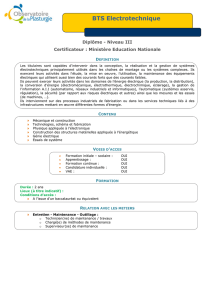
2.2. Ecrire les équations statiques de l’isolement de la voiture suivante :
……………………………………………………
l’écriture des moments se fait au point A
……………………………………………………
5.1
5.1
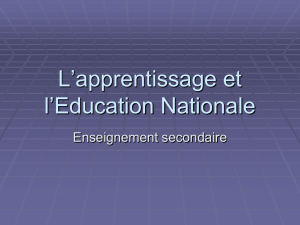
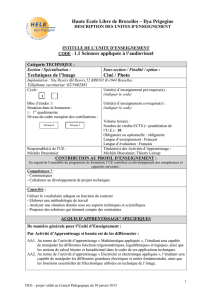
2.3. Résoudre le problème suivant :
Cet engin destiné à la pulvérisation a une particularité, ses
voies sont variables. Nous allons étudier les efforts sur le
palonnier 1. Les vérins sont soumis à une pression de 150 bars.
Pour le vérin 2, le diamètre de tige est de 45mm, le diamètre
intérieur du fût est de 80mm.
Pour le vérin 3, le diamètre de tige est de 35mm, le diamètre
intérieur du fût est de 75mm.
On demande de déterminer l’effort au point B sur le palonnier.
Calcul de l’effort en A :
……………………………………………………………………………
……………………………………………………………………………
……………………………………………………………………………
Nota : choisir et noter l’échelle pour la construction du polygone
des forces.
Compléter le tableau bilan ci-dessous, en fonction du dessin page suivante
ACTIONS EXT. PA DA SENS INTENSITE (N)
10

CFA EN49
3/7
49800 Brain sur l’Authion
Positionnement
Mécanique appliquée
Déterminer de manière graphique les actions en B et C.
3. Troisième partie : Etude Cinématique
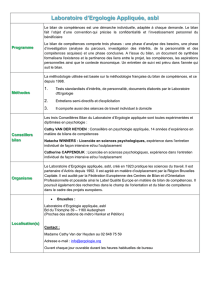
3.1. Porsche Cayman S
La vitesse maximale de la PORSCHE CAYMAN S est
de 275km/h. Le pilote atteint cette vitesse, départ
arrêté, au bout de 16.8 secondes.
En utilisant les équations du mouvement, déterminer la
distance parcourue, ainsi que l’accélération de la
voiture.
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
8

CFA EN49
4/7
49800 Brain sur l’Authion
Positionnement
Mécanique appliquée
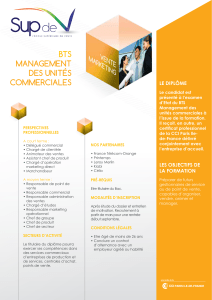
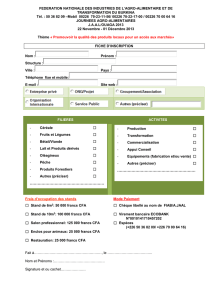
3.2. Cinématique Graphique : Système bielle – manivelle
La vitesse angulaire de la manivelle (1) est connue:
0
/
1
ω
= 100 rad/s et OA = 35 mm
La trajectoire du point A
0
/
1
∈
A
T
est un cercle de centre O et de rayon
[
]
OA
On considère que
0
/
2
0
/
1
∈
∈
=
A
A
V
V
et
0
/
2
0
/
3
∈
∈
=
B
B
V
V
L’objectif est de déterminer le vecteur vitesse
0
/
3
∈
B
V
à partir de
0
/
1
∈
A
V
1) Quelle est la droite support de
0
/
3
∈
B
V
?
………………………………………………………………………………………………………………
2) Calculer la norme de
0
/
1
∈
A
V
……………………………………………………………………………...............................................
3) Représenter
0
/
1
∈
A
V
à l’échelle 1cm pour 1m/s, sur le schéma ci-dessus.
4) Par la méthode de l’équiprojectivité déterminer
0
/
3
∈
B
V
1
1
1
2

CFA EN49
5/7
49800 Brain sur l’Authion
Positionnement
Mécanique appliquée
4. Quatrième partie : Etude de la Résistance Des Matériaux
4.1. Effort de traction dans un tirant
Un tirant AB de potence à colonne mesure 3,2 m de longueur et est cylindrique de
diamètre d.
Ce tirant est soumis à un effort de traction maximum de 2500 daN.
Le matériau utilisé est un acier dont la résistance élastique est de 50 daN/mm2.
Le coefficient de sécurité adopté pour la construction est de 5.
1) Déterminer le diamètre minimum du tirant.
………………………………………………………………………………………………………………
………………………………………………………………………………………………………………
………………………………………………………………………………………………………………
………………………………………………………………………………………………………………
………………………………………………………………………………………………………………
………………………………………………………………………………………………………………
2) Calculer l’allongement total de ce tirant. On donne E=200 000 daN/mm2.
………………………………………………………………………………………………………………
………………………………………………………………………………………………………………
………………………………………………………………………………………………………………
………………………………………………………………………………………………………………
………………………………………………………………………………………………………………
………………………………………………………………………………………………………………
2
2
 6
7
6
7
1
/
7
100%