Document

Résumé du chapitre
précédent

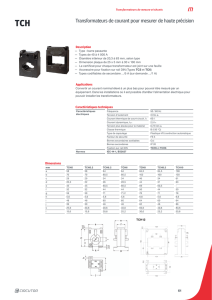
Stator
carcasse
Rotor
Inducteur

uatension d’induit
iacourant d’induit
ua
ia
Tu
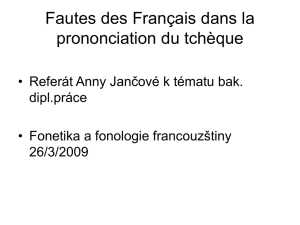
Les grandeurs physiques
MCC
Tu moment du couple utile
vitesse angulaire de rotation

Tension
d’alimentatin :
Excitation
Courant
d’induit
Force électromotrice
E= K
E
uaCircuit
électrique
+
-Laplace
Faraday
Vitesse
Angulaire
+
-Couple de
charge
Tch
ia
Arbre
mécanique
Induit Couple électromécanique
Tem = K ia
Tem
Champ magnétique

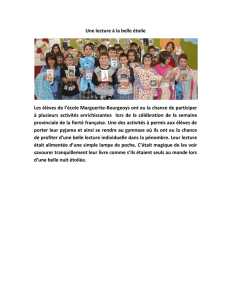
Modèle simplifié en régime permanent
Tem Tch
Frottements
Tp
ua
ia
E= K
Ra
Circuit électrique
Lorsque i = cte
l’inductance est sans effet
Ldi/dt = 0
Arbre mécanique
Lorsque
= cte l’inertie
est sans effet
Jd
/dt = 0
Ua= E + Ra.Ia
Tem = Tch + Tp
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
1
/
38
100%