Premier cours

8INF806
Conception et analyse des algorithmes
Cour 1

Rappels
•Alphabet: A
•Mot: w A*
•Langage: L A*
•Problème de décision:
–Entrée: w
–Sortie: 1 si wL, 0 sinon
•Langage = Probleme de décision

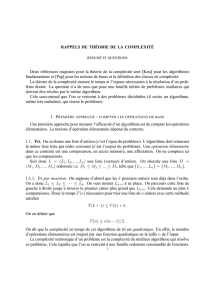
Problèmes
On est intéressé par les problèmes satisfaisant les
deux conditions suivantes:
1. Doit pouvoir se résoudre sur un ordinateur: Par exemple
le problème de trouver une juste sentence pour une
personne reconnu coupable d'un délit fait appel à des
considérations culturelles et philosophiques et ne peut
donc pas être résolu par un ordinateur.
2. L'ensemble des solutions correctes doit être non
ambiguë: Par exemple la traduction d'un texte de l'anglais
au français peut être réalisée par un ordinateur mais il
n'est pas clair ce que l'on doit considérer comme une
traduction correcte.

Problèmes algorithmiques
Un problème algorithmique est défini par:
1. La description de l'ensemble des entrées
possibles (chaque entrée est une séquence finie
de caractères).
2. La description d'une fonction qui associe à
chaque entrée un ensemble de résultats
corrects (chaque résultat est aussi une
séquence finie de caractères)

Exemples: Accessibilité dans un graphe
Entrée: Un graphe G et deux noeuds a et b
Résultat:
•Problème de recherche: On cherche un chemin de a à b.
•Problème de décision:On veut savoir s'il existe un chemin de a à b
•Problème d'optimisation: On veut un plus court chemin de a à b
•Problème d'évaluation: On veut la longueur du plus court chemin de a à b
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
1
/
32
100%