Paramètres d ordre variables collectives 051114

Titre : Auto-organisation des mouvements :
notions de « paramètres d’ordre », de « variables collectives » et de « résonance »
Cet article a été réalisée avec la collaboration :
- de Roland SULTANA (Kinésithérapeute Cadre de Santé et Karaté CN),
- de Gilbert HEURLEY (Médecin MPR),
- de Kevin VERITE (Karaté CN)
- de Bruno AUBRY (Karaté CN)
Un des arguments en faveur de la théorie de l’auto-organisation des mouvements (et de la
théorie de la dynamique des systèmes non linéaires) est la possibilité de décrire la
coordination des mouvements d’un humain (ou d’un système en mouvement auto-organisé
comme les planètes du système solaire) par une valeur unique appelée « paramètre
d’ordre » ou « variable collective » ou « résonance ».
Cette valeur permet de « capturer » dans une seule mesure le comportement de l’activité
coordonnée [1].
Autrement dit, on peut comprendre la coordination du système en mesurant un paramètre.
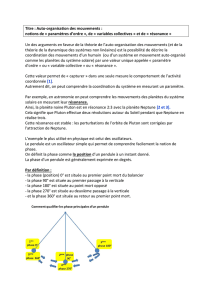
Par exemple, en astronomie on peut comprendre les mouvements des planètes du système
solaire en mesurant leur résonance.
Ainsi, la planète naine Pluton est en résonance 2:3 avec la planète Neptune [2 et 3].
Cela signifie que Pluton effectue deux révolutions autour du Soleil pendant que Neptune en
réalise trois.
Cette résonance est stable : les perturbations de l'orbite de Pluton sont corrigées par
l'attraction de Neptune.
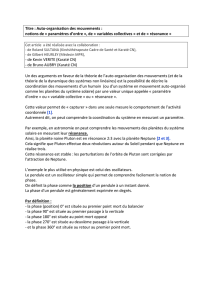
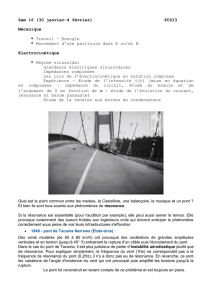
L’exemple le plus utilisé en physique est celui des oscillateurs.
Le pendule est un oscillateur simple qui permet de comprendre facilement la notion de
phase.
On définit la phase comme la position d’un pendule à un instant donné.
La phase d’un pendule est généralement exprimée en degrés.
Par définition :
- la phase (position) 0° est située au premier point mort du balancier
- la phase 90° est située au premier passage à la verticale
- la phase 180° est située au point mort opposé
- la phase 270° est située au deuxième passage à la verticale
- et la phase 360° est située au retour au premier point mort.

Figure 1 : comment qualifier les phases principales d’un pendule.
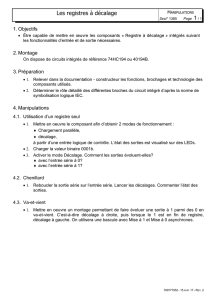
Au niveau des mouvements humains, l’exemple le plus connu est celui de la coordination bi-
manuelle des index décrit par Kelso et all. (1981) [4, 5, 6].
Figure 2 A Figure 2 B :
Par convention, la coordination est dite « en phase » si les 2 index se déplacent en même
temps vers l’adduction (figure 2A) puis vers l’abduction (figure 2B).
Ils se rapprochent et s’éloignent alternativement.
On dit que « le décalage de phase est de zéro degré ».
Figure 3 A Figure 3 B :
Par convention, la coordination est dite « en antiphase » quand les 2 index se déplacent « en
essuie-glace », simultanément et parallèlement.
On dit que « le décalage de phase est de 180 degrés ».
Cette coordination est plus difficile à réaliser que la coordination « en phase ».
Il est encore plus difficile, d’effectuer des mouvements rythmiques simultanés ayant un
décalage de phase différent de ces deux possibilités (en phase ou en antiphase).
Il est totalement impossible d’effectuer des mouvements avec un décalage de phase ne
correspondant pas à un nombre entier.

Cet exemple est très loin des pratiques physiques et sportives habituelles.
Il nous a donc semblé plus démonstratif d’utiliser la pratique habituelle des arts martiaux et
en particulier l’utilisation des nunchakus pour démontrer l’intérêt de cette théorie.
Dans cette technique martiale, on comprend facilement les notions de mouvements réalisés
en phase (figures 4 et 5), et de mouvements en antiphase, encore appelés « en opposition
de phase » (figures 6 et 7).
Les mouvements du nunchaku prolongent et amplifient les mouvements de la main, ce qui
facilite leur analyse.
Figure 4 A Figure 4 B
Commande « en phase » : les 2 nunchakus tournent dans le même sens et les 2 mains font le
même mouvement (action en miroir).
Le décalage de phase est de zéro degré (il n’y a donc pas de décalage de phase). On passe de
la position A (figure 4 A) à la position B (figure 4 B) et inversement. Il s’agit donc d’un
mouvement rythmique alternatif.
Cette commande est facile à réaliser même par les débutants. (voir la vidéo)
La vidéo est accessible à l'adresse http://youtu.be/Lji0lISHjKI
Figures 5 A, B, C, D, E et F
Comme dans l’exercice précédent, la commande se fait « en phase » car les 2 nunchakus
tournent dans le même sens et les 2 mains font le même mouvement (action en miroir). Il
n’y a donc pas de décalage de phase. La difficulté vient de l’enchainement de plusieurs
techniques qui sont toutes bilatérales et symétriques. (voir la vidéo)
http://youtu.be/Lji0lISHjKI

Figure 6 A Figure 6 B
Commande en antiphase : les 2 nunchakus tournent dans un sens opposé.
Le décalage de phase est de 180°.
La réalisation de cet exercice est nettement plus difficile à réaliser que les exercices
précédents.
En début d’apprentissage, lorsqu’on augmente la vitesse, les 2 nunchakus ont tendance à
revenir « en phase ». Cette coordination plus simple se comporte alors comme un
attracteur.
Avec l’expertise, l’attracteur en décalage de phase 180° devient de plus en plus fort et les
erreurs sont de moins en moins fréquentes. . (voir la vidéo) http://youtu.be/Lji0lISHjKI
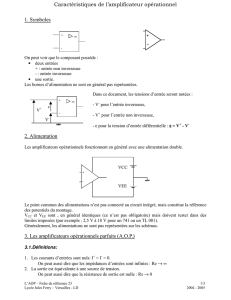
Figure 7
Un enchainement encore plus complexe.
En plus d’un décalage de phase de 180°, il existe également des décalages de fréquence.

Le nunchaku supérieur fait 2 tours alors que le nunchaku inférieur n’en fait qu’un seul. On
peut décrire mathématiquement ce décalage à l’aide de la notion de résonance : le
nunchaku supérieur est en résonnance 2 :1 avec le nunchaku inférieur.
Si l’on augmente la vitesse de cet enchainement, il n’est plus possible de réaliser le décalage
de fréquence et les 2 nunchakus ne font qu’un seul tour de chaque côté. Le passage d’une
coordination à l’autre sous l’influence de la vitesse est appelé « transition de phase ».
. (voir la vidéo) http://youtu.be/Lji0lISHjKI
Figure 8-1 Figure 8-2 Figure 8-3 Figure 8-4 Figure 8-1bisIl s’agit d’un
exercice en 4 temps, où la main droite est toujours en retard d’un temps (décalage de phase
de 90°) sur la main gauche. . (voir la vidéo) http://youtu.be/Lji0lISHjKI
Les mouvements symétriques (qui ont la même phase) sont relativement faciles à réaliser.
Ceux en antiphase sont nettement plus difficiles. Ils sont impossibles à réaliser par des
débutants.
Si l’on augmente la vitesse d’un mouvement en antiphase, les novices finissent par se
tromper et les mouvements se font alors en phase. C’est ce qu’il est convenu d’appeler une
« transition de phase ».
Les experts peuvent effectuer les mouvements en antiphase à grande vitesse sans transition
de phase.
Les autres décalages de phases (ni en phase et ni en antiphase) sont encore plus difficiles,
surtout si l’on augmente la vitesse des mouvements.
Les décalages de phases qui ne correspondent pas à des rapports simples sont impossibles à
réaliser.
A notre avis, la notion de programme moteur n’est pas en contradiction avec celle d’auto-
organisation des mouvements [7]. Au contraire, ces deux notions sont complémentaires.
Dans cette logique, les hypothèses suivantes peuvent être proposées :
- Plus la programmation des mouvements est simple pour le système nerveux central et plus
leur réalisation est facile.
- Un programme moteur « en phase » est plus simple qu’un programme « en antiphase ».
 6
7
6
7
1
/
7
100%