Coup de Cachan

2016
IUT 1 ENEPS GRENOBLE
09/06/2016
Coup de Cachan
Florian Borel Garin
Florian Mifsud
Marc Cauchepin
Romain Geoffroy
Anthony Gascon

1
Sommaire
1. Introduction ..................................................................................................................................... 2
2. Choix de l’application ...................................................................................................................... 2
Pourquoi ? ........................................................................................................................................... 2
3. Fonctionnement de notre carte moteur ......................................................................................... 2
Table de vérité ..................................................................................................................................... 2
Traitement du signal : ...................................................................................................................... 5
Typon : ..................................................................................................................................................... 6
Intro ......................................................................................................................................................... 7
Techno utilisée ........................................................................................................................................ 7
Le signal ................................................................................................................................................... 7
Intro ......................................................................................................................................................... 8
Programme développé pour les obstacles .............................................................................................. 8
Programme principal ............................................................................................................................... 8
1. Crève ballon ............................................................................................. Erreur ! Signet non défini.
1.1Ballon : .................................................................................................... Erreur ! Signet non défini.
1. L’arrivée : ................................................................................................. Erreur ! Signet non défini.
1. Explication : ..................................................................................................................................... 9
2. Partie électronique : ........................................................................................................................ 9

2
Carte Moteur
1. Introduction
Le but de cette carte est de faire tourner un moteur électrique à courant continu à l’aide d’une PWM
avec un composant simple et peu cher (L6205N de chez ST microélectronique). Il y a plusieurs
applications différentes pour le câblage du pont en H.
Pas de grande théorie sur les ponts en H, mais juste un rappel : les moteurs électriques que nous
allons utiliser font tourner un aimant en faisant circuler un courant dans des bobines. Un contrôleur
de moteur est donc un composant de puissance capable d’alimenter un moteur électrique en
fonction des consignes que vous lui donnez (avec une PWM).
2. Choix de l’application
L’application de la datasheet utiliser est “Parallel connection for higher current”. (Schémas en
Annexe)
Pourquoi ?
Cahier des charges:
- Il faut que la carte soit capable de supporter des pics de courant (exemple 12A).
- Il faut une régulation de la vitesse des moteurs (avec une PWM).
- Il faut que la carte support une tension d’alimentation de 12V.
- Il faut que le courant nominal soit de 3A.
- Il faut qu’on puisse utiliser la marche arrière.
Donc on a recherché dans la datasheet s’il y avait déjà un montage qui correspond au cahier
des charges et puis on en a choisi un qui était proposé car il répondait à la demande.
(Voir Annexe 2).
3. Fonctionnement de notre carte moteur
Table de vérité
I
np
uts
outp
uts
EN
IN1
IN2
OUT1
OUT2
L
X
X
HighZ
HighZ
H
L
L
GND
GND
H
H
L
Vs
GND
H
L
H
GND
Vs
H
H
H
Vs
Vs

3
RECEPTION :
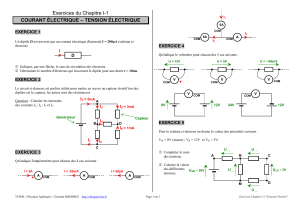
Schéma bloc fonctionnel de la carte de la réception :
Cette carte permet au robot de savoir où il est. Avec ces 8 capteurs, il capte à 360 degrés (un capteur placé
tous les 45 degrés sur une carte ronde).
Le signal que reçoit le capteur est une trame avec des caractères binaires, le signal est envoyé sous forme ultra-
violet.
L’objectif de la carte est de réceptionner les signaux émis par l’émetteur, puis avec l’aide d’un multiplexeur
sélectionner un par un les sorties des capteurs.
Le PIC utilisée est un 16f887 de chez microship.
Sélections des capteurs
CODE BINAIRE
PIC MULTIPLEXEUR
LEDS ETATS
CODE BINNAIRE
VERS LE PIC PRINCIPALE
CAPTEURS
Etats de fonctionnement
des LEDS
en
fonctions des signaux reçu
Récupération du signal du capteur sélectionnée
Code choisi

4
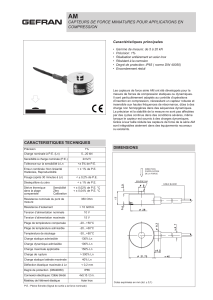
Le multiplexeur est de référence 74HC151. Il intègre 8 entrée avec une sortie, ces sorties sont sélectionnables
via une commande sous 3 bits. Exemple de fonctionnement pour sectionner l’entrée 0 il faut envoyer un code
binaire 0b000 ;
Le capteur est sectionné via une commande faite par le microcontrôleur et va directement sur la
broche de la réception de la liaison série du PIC. Cela va permettre via programmation de récupérer
le caractère émis via l’émission.
Après je vais effectuer dans le programme, une fonction qui sectionner un capteur les un après les
autres jusqu’à je récupère un caractère. Dans une autre fonction j’ai préalablement
Sélectionnée les caractères que je souhaiterai recevoir. (Bien sur ce caractère doit être le même
sélectionner entre sur l’émetteur et le récepteur).
Pour incrémentée la commande en binaire j’utilise une fonction for.
Dans mon for je vais faire incrémenter une variable. Cette variable va d’abord être mise a 0.
Puis elle va être incrémentée par pas de 1 jusqu’à 8.
Figure 1. Schéma bloc d’un fonctionnement d’un multiplexeur
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%