- Modèles électriques équivalents d`une charge

1
TP1 : UTILISATION DU WATTMETRE
- Modèles électriques équivalents d'une charge
- Amélioration du facteur de puissance
OBJECTIFS
L'objectif principal de cette manipulation est la mise en œuvre de la mesure des puissances
actives, réactives et apparentes en monophasé, sur une charge supposée linéaire. Le système étudié est
constitué d'une source de tension monophasée (V = 230 V) et de différentes charges résistives,
inductives et capacitives.
Dans un premier temps et après une phase de familiarisation avec le wattmètre, on se propose
d'identifier à partir des mesures de puissances, les modèles électriques équivalents de la charge. On
cherchera ensuite à prévoir, par la méthode de Boucherot, le point de fonctionnement du système
lorsque les deux charges sont branchées en parallèle.
Les mesures temporelles de courant de ligne et de la tension appliquée permettront de mieux
apprécier le déphasage courant-tension et le facteur de puissance.
Les connaissances acquises durant la manipulation seront mises à profit pour améliorer le facteur
de puissance d'une charge inductive. L'utilisation de l'oscilloscope et d'une sonde de courant permettra
de mieux appréhender le rôle des condensateurs.
À l'issue de la manipulation (et après un travail personnel !), l'étudiant doit savoir traiter les points
suivants:
- Mettre en œuvre la mesure de la puissance active, de la puissance apparente et de la puissance
réactive.
- Apprécier les déphasages des diverses grandeurs électriques en s'aidant de diagrammes vectoriels
qualitatifs.
- Évaluer le facteur de puissance d'une charge.
- Élaborer les modèles électriques équivalents d'une charge à partir de la mesure des puissances
qu'elle consomme.
- Effectuer un bilan de puissance par la méthode de Boucherot.
- Prédéterminer le point de fonctionnement à partir d'un bilan de puissance.
- Prédéterminer la capacité nécessaire pour améliorer le facteur de puissance d'un montage.

2
MATERIELS MIS A DISPOSITION
La liste du matériel nécessaire pour effectuer cette manipulation est la suivante :
- Une source de tension monophasée, V = 230 V (tableau de distribution) [S1].
- Un rhéostat PRN100 : Rmax =100Ω, Ιmax=2.5A, U=230V, Pmax = 640W [R1]
- Une bobine à noyau de fer (d'inductance variable) : Lmax = 1.5 H, Imax = 2.5 A, U = 250 V [L1]
- Une charge capacitive (variable) : U = 250 V, C∈[0 ; 32 µF] par paliers de 0,1 μF [C1]
- Une platine de commande comportant des interrupteurs pour mettre en service de manière
indépendante les trois charges ci-dessus. Cette platine permet aussi un branchement facile du
wattmètre pour effectuer les mesures de puissance [B1].
- Une sonde de courant PR30 [M2]
- Un wattmètre numérique (NANOVIP) pour la mesure de V, I, P, Q, S et FP [M1]
- Un oscilloscope Tektronix TDS 210 à deux voies équipé de la sonde de tension à deux voies
(ST1000) et de la sonde de courant (PR30) pour les mesures temporelles [M2, M3].
PRÉCAUTIONS ET RECOMMANDATIONS
Il est impératif :
¾ De faire vérifier le montage à chaque modification de câblage,
¾ De prendre soin à ne pas dépasser les valeurs nominales de courant et de tension, de chacune des
charges,
¾ De prendre le type d'appareil adapté à la mesure à réaliser (mesure temporelle, valeur moyenne,
efficace, efficace vraie, bande passante, valeurs limites, formes d'ondes, etc...),
¾ De prendre soin de ne pas dépasser les calibres des appareils de mesures (ampèremètre, voltmètre,
wattmètre).
Remarque : Les postes de manipulation utilisés par la Licence (L2 et L3) sont
alimentés en tension triphasée équilibrée 133 V / 230 V. La tension est quasi-
sinusoïdale (légèrement déformée par la saturation du transformateur
d'alimentation général). À cause de cette distorsion on prendra soin d'utiliser des
appareils efficaces vraies: ferromagnétiques repérés par le symbole , ou
numériques adaptés.

3
RAPPELS
1. GENERALITES
On se reportera au cours et aux Travaux Dirigés. Seuls les compléments nécessaires sont rappelés ici.
1.2 Puissance instantanée p(t) en régime sinusoïdal
Ici, le dipôle est toujours traité en convention récepteur
p(t) > 0 ==> puissance consommée par le dipôle
p(t) < 0 ==> puissance fournie par le dipôle
La puissance instantanée p(t) d'un dipôle est le produit du courant temporel i(t) qui le traverse par
la tension temporelle appliquée à ses bornes p(t) = i(t) v(t). Sa fréquence est le double de celle de
la tension et du courant.
1.3 Puissance active P
La puissance active P mise en jeu est la valeur moyenne, sur une période T, de la puissance
instantanée. Elle est donnée par :
1
() ()() () V I FP
t
tT
Ppt utit pd
T
ττ
−
=< >=< >= = × ×
∫ (FP est le facteur de puissance)
Remarque 1: Pour des facilités de calcul, on peut bien entendu choisir l'instant t le plus judicieux,
par exemple t=T. La puissance active s'exprime dans ce cas
0
1()
T
Ppd
T
τ
τ
=∫.
Remarque 2: La valeur moyenne d'une variable f(t) peut être notée aussi fau lieu de
< f(t) > (voir manipulation sur l'alimentation à découpage ou le variateur de vitesse).
Seule la puissance active est consommée et transformée en chaleur, puissance mécanique,
rayonnement, etc. En régime sinusoïdal pur:
VIcosP
ϕ
= Unités : W (V et I valeurs efficaces)
1.4 Puissance apparente S
S = V.I Unités : VA (Volt Ampère) S > 0 Toujours
1.5 Facteur de puissance FP
Le facteur de puissance FP est défini par : P
FP= 1
S
≤
. En régime sinusoïdal pur, F
P
=cos
ϕ
.
1.6 Puissance apparente complexe S et puissance réactive Q en régime sinusoïdal pur
En régime sinusoïdal, la puissance apparente complexe S est :
(
)
*cos sin
VI
VIj
jjj
SVI VeIe VIe VIe VI jVI PjQ
θθ
θθϕϕϕ
−
−
== = = = + =+
Sa partie imaginaire Q est appelée puissance réactive. C'est une puissance fictive qui est mise en
jeu par des inductances et des condensateurs. On a aussi : 22
QSP=± −
Q=V
I
sin
ϕ
Unités : VAR (Volt Ampère Réactif)

4
2. TECHNIQUE DE MESURE DE LA PUISSANCE ACTIVE
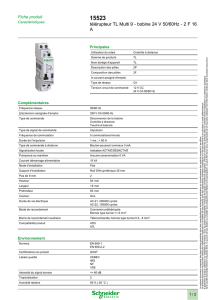
La mesure de puissance se fait à l'aide d'un wattmètre. La figure 1 montre le principe de
branchement d'un wattmètre dans un circuit quelconque.
Figure 1 : Schéma d’utilisation d’un wattmètre en monophasé : mesure de la puissance active.
Le wattmètre à aiguille (pour plus d'information voir l'annexe "Notes sur les appareils de
mesure") est un appareil électrodynamique ou ferrodynamique qui permet la mesure de la puissance
moyenne (donc, la puissance active) mise en jeu par un dipôle. Cet appareil possède une bobine de
courant et une bobine de tension bien distinctes. La mesure de la puissance est correcte si le courant
rentre par la borne étoilée de la bobine de courant et si le potentiel le plus élevé se situe sur la borne
étoilée de la bobine de tension.
Le wattmètre numérique est un appareil qui échantillonne les signaux d'entrée, i(t) et v(t). Ceci
permet d'effectuer divers calculs numériques. Entre autres, le wattmètre numérique peut afficher le
courant efficace I, la tension efficace V, la puissance active P, la puissance réactive Q, la puissance
apparente S et le facteur de puissance FP. Dans ces TP nous utiliserons uniquement un wattmètre
numérique.
Exercice 1 : À l'aide d'un diagramme vectoriel, trouver l'expression de la puissance active P que
mesure un wattmètre si:
- a) on inverse seulement le branchement de la bobine de courant,
- b) on inverse seulement le branchement de la bobine de tension,
- c) on inverse à la fois les branchements des bobines de courant et de tension.
- d) Conclure.
S
O
U
R
C
E
C
H
A
R
G
E
Wattmètre: VIcosP
ϕ
=
**
V
I

5
3. MODELES ELECTRIQUES EQUIVALENTS D'UNE CHARGE MONOPHASEE.
On dit que deux dipôles sont équivalents lorsqu'ils possèdent la même relation courant-tension
))(()( tvfti = (ou inversement) à leurs bornes. En régime sinusoïdal, deux dipôles équivalents
soumis à la même différence de potentiel V, seront ainsi traversés par le même courant I et mettront
donc en jeu les mêmes puissances active P, réactive Q et apparente S.
Tout dipôle passif linéaire, aussi compliqué soit-il, peut être modélisé par un seul dipôle passif
équivalent constitué par l'association d'une résistance pure R et une réactance pure X )
C1
ouL( ω
−
ω.
La relation courant-tension du dipôle équivalent est la même que celle du dipôle réel.
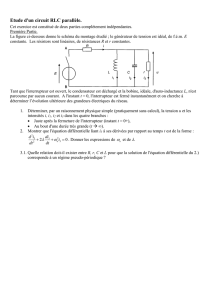
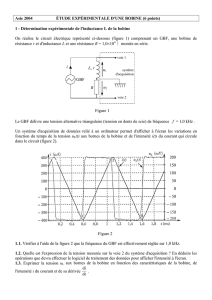
L'association des éléments du dipôle équivalent (figure 2) peut être :
- soit série, dans ce cas on les identifie par Rs et Xs
- soit parallèle, dans ce cas on les identifie par Rp et Xp.
Figure 2 : Dipôle équivalent en monophasé
Exercice 2 : Donner les formules pour Rs, Xs, Rp, Xp en fonction de I, V et P (ou Q).
·
·
A
B
Rs
Xs
·
·
A
B
Rp X
p
≡
≡
I ·
·
A
B
Z
V
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
1
/
63
100%