I.5 Généralités sur la variation de vitesse des moteurs électriques

Cours Entrainement Electrique R. Kifouche, Avril 2015
1
Ch.I Généralités sur les entrainements électriques :
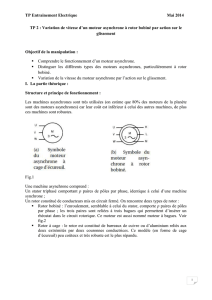
I.1 Chaîne de transmission électromécanique:
Un entraînement électrique est un système électromécanique destiné à réaliser un processus
technologique grâce au mouvement d’un organe de travail. Il est généralement constitué d’un
moteur électrique, son alimentation qui constitue le départ moteur, qui est lui même un circuit
intermédiaire entre le moteur et le réseau, d’un convertisseur mécanique de mouvement (ex:
Couplage/réducteur), d’un organe de travail (la charge) et d’un système de commande.
La chaine de transmission complète peut être représentée par figure suivante :
Réseau
Alimentation
Moteur
K
Charge
Arbre
moteur
P
a
m
P
u
T
m
m
K=
r
/
m
r
P
c
c
T
c
J
Couplage/Réducteur
Pa
: Puissance absorbée par le moteur en W ou kW
m
: Rendement du moteur (m= Pu / Pa)
Pu
: Puissance utile fournie par le moteur sur l’arbre en W ou kW (Pu = Tm m)
Tm
: Couple utile sur l’arbre moteur ou couple résistant opposé par la charge en Nm
m
: Vitesse de rotation de l’arbre moteur en rad/s
K
: Rapport de réduction du réducteur (K = r / m )
r
: Rendement du réducteur (r = Pc/ Pu )
Pc
: Puissance demandée par la charge en W ou kW
c
: Vitesse de rotation de la charge en rad/s
Tc
: Couple résistant de la charge en Nm
J
: Moment d’inertie de la charge en kg/m2
I.2 Alimentation :
Très souvent appelé "départ moteur" on y retrouve, à la base, l'appareillage électriques
nécessaires pour la commande et la protection du moteur et des lignes.
I.2.1 Choix du matériel de « départ-moteur » :
Un départ-moteur peut être constitué de 1, 2, 3 ou 4 appareillages différents assurant une ou
plusieurs fonctions. Les paramètres à prendre en compte pour le choix d'un départ moteur sont
multiples, ils dépendent :
De l'application (type de la machine entraînée, sécurité d'exploitation, cadence de
manœuvre, etc.)
De la continuité de service imposée par l'utilisation ou par l'application
Des normes à respecter pour assurer la protection des biens et des personnes.

Cours Entrainement Electrique R. Kifouche, Avril 2015
2
Les fonctions électriques à assurer sont de natures très différentes :
Protection : Protéger le démarreur et les câbles contre les courts-circuits, les faibles
surintensités en plus de certaines protections spécifiques supplémentaires
Commande : mettre en marche et arrêter le moteur éventuellement mise en vitesse
progressive voire régulation de la vitesse.
Isolement ou sectionnement : isoler le circuit en vue d'opérations de maintenance sur le
départ-moteur.
I.2.2 Les différentes représentations des schémas d'alimentations :
L'alimentation des moteurs électriques dépend, bien évidemment, du type du moteur et des
objectifs recherchés. Laissant de coté l’appareillage nécessaire pour la connexion et la
protection, on présente, ci-après, les différentes alimentations pour la variation de vitesse.
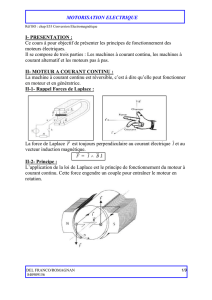
a. Alimentation par des rhéostats de démarrage d'un moteur à courant continu :
Dans ce cas le rhéostat est utilisé principalement pour limiter le courant de démarrage, mais il
peut être aussi utilisé pour la variation de vitesse. Le rôle du rhéostat est de dissiper une partie
de la puissance débitée par la source et ainsi limiter la puissance absorbée par le moteur.
La figure ci-contre montre le schéma de
câblage d’un rhéostat courant. (Exemple
moteur en dérivation)
b. Alimentation électronique des moteurs à courant continu :
L'alimentation électronique des moteurs est basée sur les convertisseurs électroniques
d'énergie. Le choix du type du convertisseur dépend de l'énergie disponible à la source
(continue ou alternative) et les caractéristiques de commande qu'on cherche à obtenir.
Si la tension de la source est continue on utilise un hacheur,
Si la tension de la source est alternative on a deux possibilités : soit un redresseur
commandé ou un redresseur plein diode associé à un hacheur ou précédé d'un
autotransformateur.

Cours Entrainement Electrique R. Kifouche, Avril 2015
3
Le choix des structures internes des convertisseurs électroniques utilisés est dicté par les
quadrants de fonctionnement dans les quels ont cherche à faire fonctionner les moteurs.
c. Alimentation des moteurs à courant alternatif :
Alimentations classiques des moteurs à courant alternatif :
Les schémas d'alimentations classiques des moteurs à courant alternatifs sont représentés ci-
dessus, on y retrouve principalement :
L'alimentation directe : Le moteur fonctionne au tour de sa caractéristique naturelle.
La vitesse de rotation dépend de la charge entrainée. La commande est limitée à la
mise en marche ou à l’arrêt du moteur.
L’alimentation étoile-triangle : elle permet d'alimenter le moteur avec une tension
simple ou une tension composée, elle est utilisée pour réduire le courant de démarrage
L’alimentation à travers des résistances : Pour les résistances, elles sont insérées en
série soit avec le circuit statoriques soit avec le circuit rotoriques. Les résistances ont
pour rôle d'agir sur la valeur du courant du moteur dans le but de métriser les courants
d'appel ou obtenir des vitesses de rotations différentes.
L’alimentation avec un autotransformateur : L’autotransformateur est utilisé pour agir
sur la valeur de la tension d’alimentation du moteur.
Le nombre des résistances ou de positions de l’autotransformateur, définissent le
nombre de vitesses de rotation qui peuvent être mises en œuvre.
Autotransformateur associé à un
redresseur triphasé à pont tout diode
Redresseur monophasé à pont
mixte
Alimentation d'un moteur à courant
continu par un hacheur

Cours Entrainement Electrique R. Kifouche, Avril 2015
4
Alimentation électroniques des moteurs à courant alternatifs
Les alimentations par gradateur ou par un onduleur associé à un redresseur sont très utilisées
pour les entrainements à vitesse variables. Le premier est utilisé comme démarreur progressif
ou variateur de vitesse pour les moteurs de très grandes puissances, il agit sur la tension
Alimentation direct
Alimentation étoile triangle
Alimentation par des
résistances statoriques
Alimentation par
autotransformateur
Alimentation par des résistances rotoriques

Cours Entrainement Electrique R. Kifouche, Avril 2015
5
efficace d'alimentation alors que le deuxième, l'onduleur, agit sur la fréquence et l'amplitude
de la tension qui alimente le moteur. Avec les différentes techniques de commande on peut
contrôler la vitesse, le couple ou la position du moteur.
I.1.2 Les moteurs électriques :
I.1.2.1 définition :
D'une manière générale, on définit une machine électrique comme étant un dispositif de
conversion entres deux types d'énergies, l'une d'entres elles est électrique.
Quand la conversion est dans le sens Electrique => Mécanique notre machine est un moteur,
mais quant la conversion est dans le sens Mécanique => Electriques la machine est une
génératrice.
I.1.2.2 Les types des moteurs électriques:
On trouve principalement des moteurs électriques à courant continu et des machines à courant
alternatif.
a. Moteurs électriques à courant continu :
Selon les différents montages possibles entre les enroulements rotoriques et statoriques on
obtient les différents types existants, on trouve donc :
Moteur à excitation indépendante :
Les deux enroulements statorique et rotorique sont alimentés
avec des sources de tensions indépendantes. Il faut, donc, deux
alimentations : une pour l’inducteur et l’autre pour l’induit.
Alimentation par gradateur
Alimentation par redresseur-onduleur
MOTEUR
Conversion
d'énergie
Electrique
Mécanique
GENERATRICE
Alimentation par gradateur
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%