Chapitre 6 : Oscillations mécaniques forcées à un degré de liberté

Mécanique PTSI
Chapitre 6
1
−
On s’intéresse dans ce chapitre à la réponse (en amplitude et en vitesse) d’un oscillateur
mécanique à une excitation sinusoïdale.
Cette étude sert de modèle pour traiter une grande variété de phénomènes obéissant au même
type d’équations différentielles (circuits électriques soumis à une excitation sinusoïdale,
membrane d’un haut-parleur, atomes ou molécules excités par des ondes lumineuses,
sismographe, etc.)
I. Réponse d’un oscillateur amorti par frottement fluide à
une excitation sinusoïdale
Système étudié et équation différentielle du mouvement
On s’intéresse à :
un point matériel M de masse m,
évoluant suivant un seul degré de liberté, noté x,
dans un référentiel galiléen,
Bilan des forces :
amortissement par frottement fluide
vf α−=
,
force de rappel
(
)
x
ekT
0
−−= ,
excitation sinusoïdale
(
)
(
)
(
)
xx
etFetFtF
ω== cos
0
,
poids.
En choisissant judicieusement l’origine du degré de liberté, l’équation du mouvement de ce
système s’écrit sous les formes suivantes :
(
)
( )
( )
( )
m
tF
xx
Q
x
m
tF
xxx
m
tF
x
m
k
x
m
x
tFkxxxm
=ω+
ω
+
=ω+λ+
=+
α
+
=
+
α
+
2
0
0
2
0
2
avec
m
k
=ω
2
0
pulsation propre de l’oscillateur,
λ
ω
=
α
ω
=
2
00
m
Q facteur de qualité.
Si F(t) = 0, on retrouve l’équation différentielle décrivant les différents régimes libres.
L’exemple étudié dans le cours est un ressort vertical à origine mobile, notée A. L’équation
différentielle s’écrit alors :
(
)
( )
txxx
Q
x
tkxkxxxm
A
A
2
0
2
0
0
ω=ω+
ω
+
=
+
α
+
.

Mécanique PTSI
Chapitre 6
2
Régime transitoire – régime sinusoïdal forcé
La solution de l’équation précédente est la somme d’une solution particulière
(
)
tx
SP
et d’une
solution sans second membre
(
)
tx
SSSM
. On s’intéresse uniquement à des excitations
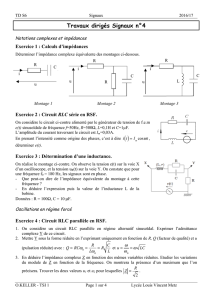
sinusoïdales et on se placera toujours en régime permanent si bien
(
)
tx
SP
sera de type
sinusoïdal et que l’on pourra négliger
(
)
tx
SSSM
correspondant au régime transitoire au bout de
quelques fois la durée caractéristique τ de ce régime :
Excitation
(
)
tx
A
ou
(
)
tF
0 n×τ t
Solution
(
)
(
)
txtx
SSSMSP
+
(
)
tx
SP
Régime Transitoire Sinusoïdal permanent
II. Étude du régime sinusoïdal forcé
Représentation complexe
Pour une excitation
(
)
(
)
tAtx
A
ω
=
cos , le RSP est de la forme
(
)
(
)
ϕ
+
ω
=
tXtx cos . Le
passage en complexe de l’équation différentielle donne :
AXX
Q
jX
2
0
2
0
0
2
ω=ω+
ωω
+ω− avec
(
)
ϕ
=
jXX exp .
Résonance en amplitude
Après calculs
X
se met sous la forme
Q
x
jx
A
X
+−
=
2
1
avec
0
ω
ω
=x.
Soit en module
( )
2
2
2
2
1Q
x
x
A
X
+−
=.
Si 707,0
2
1≈<Q, cette amplitude ne présente pas de maximum, il n’y a pas résonance en
amplitude.
Si 2
1
≥Q, cette amplitude présente un maximum en
2
2
1
1Q
x
res
−= . L’amplitude à la
résonance est alors
( )
2
4
1
1Q
QA
xX
res
−
=. Cette quantité est d’autant plus grande que Q est
grand. De même plus Q est grand plus la résonance se produit proche de la valeur x = 1.
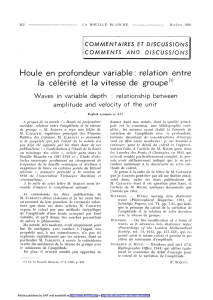
Les courbes de résonance en amplitude sont alors de la forme :

Mécanique PTSI
Chapitre 6
3
0,0 0,5 1,0 1,5 2,0 2,5 3,0
0
1
2
3
pulsation réduite
x
X / A
Q = 0,4
Q = 0,707
Q = 3
Résonance en vitesse
Pour trouver l’amplitude complexe de la vitesse on remarque que XjV
ω
=
soit après
calculs
−+
ω
=
x
xjQ
QA
V1
1
0
et en module
2
2
0
1
1
−+
ω
=
x
xQ
QA
V.
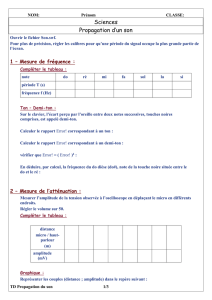
La résonance en vitesse se produit en x = 1 et l’amplitude de la vitesse à cette pulsation est
0
ω
=
QAV
res
.
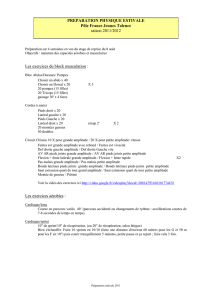
On obtient le réseau de courbes suivant pour différentes valeurs du facteur de qualité :
0,0 0,5 1,0 1,5 2,0 2,5 3,0
0
2
4
6
8
10
pulsation réduite
Amplitude de la vitesse V/(Aω
0
)
Q
= 0,5
Q
= 1
Q
= 3
Q
= 9

Mécanique PTSI
Chapitre 6
4
On observe donc des analogies avec les résonances en intensité et tension pour le circuit RLC
série :
Domaines de la
physique Électrocinétique Mécanique
Résonances Intensité Vitesse
Caractéristiques
communes Existent quel que soit Q.
Se produisent pour x = 1.
Résonances Tension aux bornes du
condensateur Amplitude des oscillations
Caractéristiques
communes
N’existent que si 2
1
≥Q.
Se produisent pour
2
2
1
1Q
x
res
−= .
Le maximum vaut
( )
2
4
1
1Q
QA
xX
res
−
=.
III. Étude énergétique
Bilan de puissance instantanée :
L’énergie mécanique à un instant t s’écrit
22
2
1
2
1mvkxE
m
+=
. Les variations de cette énergie
sont uniquement dues à l’énergie dissipée par frottement et à l’énergie fournie par le système
excitateur :
fourniedis.
d
dpp
t
E
m
+=
.
Les fonctions
(
)
tx et
(
)
tv étant périodique, on a en moyenne
0
2
1
2
1
22
== mvkx
.
Bilan de puissance moyenne :
Ainsi, le bilan de puissance moyenne s’écrit :
0
fourniedis.fourniedis.
=+=+ PPpp soit
dis.fournie
PP
−
=
La puissance moyenne fournie par la force excitatrice compense exactement les pertes par
frottement fluide.
IV. Analogie électromécanique
Il existe une analogie frappante entre un circuit RLC série alimenté par une tension
sinusoïdale et une masse reliée à un ressort, soumise à des frottements fluides et dont l’origine
A est mobile sinusoïdalement.
Les équations différentielles vérifiées par la grandeur oscillante sont de la forme :
( ) ( ) ( )
tkxtFkxxxmte
C
q
qRqL
A
==+α+=++

Mécanique PTSI
Chapitre 6
5
Tableau comparatif :
Grandeurs électriques Grandeurs mécaniques
Grandeur oscillante : charge du
condensateur q Grandeur oscillante :
position de la masse x
Dérivée de la grandeur
oscillante :
intensité du courant
i
Dérivée de la grandeur
oscillante :
vitesse de la masse
v
Inertie au changement de i :
inductance L Inertie au changement de
v : masse m
Capacité du condensateur C Inverse de la constante de
raideur du ressort
k
1
Grandeur quantifiant
l’amortissement R Grandeur quantifiant
l’amortissement α
Énergie magnétique
2
2
1Li
Énergie cinétique
2
2
1mv
Énergie électrostatique C
q
2
2
1 Énergie potentielle
élastique
2
2
1kx
Puissance dissipée :
par effet Joule
(
)
tRi
2
Puissance dissipée :
par frottement fluide
(
)
tv
2
α
Puissance instantanée fournie
par la source de tension
(
)
(
)
tite
Puissance mécanique
instantanée fournie
(
)
(
)
tvtkx
A
Définition de l’impédance
électrique complexe I
U
Z= Définition de l’impédance
mécanique complexe V
F
Z=
Expression
dans le cas présent
ω
+ω+ jC
jLR 1
Expression
dans le cas présent ω
+ω+α j
k
jm
1
/
5
100%