CHAPITRE 14 : DISPOSITIF SOLIDE

CHAPITRE 14 : DISPOSITIF SOLIDE-RESSORT
PENDULE ELASTIQUE
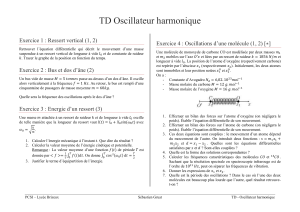
Il est constitué d’un ressort de masse négligeable, à spires non jointives, dont l’une des extrémités A est fixe et l’autre
extrémité M est fixée à un solide de masse m.
Lorsqu’on écarte le solide de sa position d’équilibre et qu’on le lâche sans vitesse, il oscille de part et d’autre de cette
position d’équilibre.
EXPRESSION DE LA FORCE DE RAPPEL EXERCEE PAR UN RESORT
Au repos, l’extrémité mobile occupe la position Mo et la longueur du ressort vaut alors lo = AMo .
Si on déplace l’extrémité mobile, le ressort exerce sur le solide une force de rappel (qui tend à le ramener vers sa position d’équilibre)
dont la valeur est proportionnelle à la déformation MoM du ressort.
L’expression vectorielle de la force de rappel est →
F = - k. —–—
>
MoM où k est la raideur du ressort (k > 0)
→
F = - k .—–—
>
MoM = - k. x .
→
i
k > 0 et x > 0 ⇒
⇒⇒
⇒ →
F est orientée en sens inverse de →
i
→
F = - k .—–—
>
MoM = - k. x .
→
i
k > 0 et x < 0 ⇒
⇒⇒
⇒ →
F est orientée dans le sens de →
i
EQUATION DIFFERENTIELLE DU MOUVEMENT
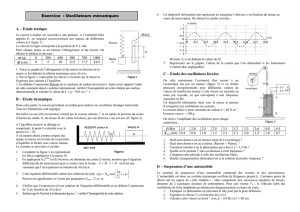
• On considère un solide S de masse m relié à l'extrémité M d'un ressort de masse nulle, de raideur k et dont l'autre
extrémité est fixe. Le solide S est astreint à se déplacer sur un banc à coussin d’air. A l’équilibre, son centre d'inertie
occupe la position Go.
Choix du référentiel : terrestre (supposé galiléen)
Choix du système : le solide S
Inventaire des forces :
force →
F exercée par le ressort ; force de frottement →
f ; poids →
P
du solide ; réaction →
R du coussin d’air.
Application de la deuxième loi de Newton :
m. →
a = →
P + →
R + →
f + →
F
Choisissons un repère de projection (0; →
i ) dont l’axe est
parallèle au ressort et l’origine coïncide avec la position Go du
centre d'inertie à l'équilibre.
m . . .
x = fx - k . x, soit . .
x + k
m x = fx
En l’absence de frottements, l’équation différentielle du mouvement est donc : . .
x + k
m x = 0
Solution de l’équation différentielle en l’absence de frottements
x = xm . cos ( 2π
To t + φo) où xm est l’amplitude du mouvement, φo est la phase à l’origine des dates. xm et φo sont
déterminés par les conditions initiales.
To = 2π k
mest la période propre des oscillations libres. Le mouvement du solide est sinusoïdal.
Mo
Mo
Mo
M
M
Pour déterminer la phase initiale
φ
et l'amplitude Xm, on étudie la position et la vitesse de G à t = 0.
à t = 0, x = xo = xm cosφο v = vo = - 2π/To .xm.sin(φο)
La résolution de ce système de 2 équations à 2 inconnues conduit à 2 solutions possibles pour φ (à 2kπ près). Par
convention, on choisira la valeur de φ qui conduit à une valeur positive pour xm.
Cas particulier: si on choisit l'instant t = 0 au moment où l'élongation est maximale et positive, xo = +xm et vo = 0
d'où φο = 0 et l'équation horaire de G s'écrit alors de manière simple: x = Xm.cos (2π/To). t

CHAPITRE 14 : DISPOSITIF SOLIDE-RESSORT
CAS OU LES FROTTEMENTS NE SONT PAS NEGLIGeABLES
L’équation différentielle s’écrit alors : . .
x + k
m x = fx
Dans le cas où les frottements ne sont pas négligeables, on observe un mouvement pseudo-périodique de pseudo-période
proche de To, ou un mouvement apériodique, selon que l'amortissement est faible ou important.
PHENOMENE DE RESONANCE
• Un excitateur de fréquence f peut imposer à un oscillateur des oscillations sinusoïdales à cette fréquence. L'amplitude
de ces oscillations dépend de f. Elle est maximale lorsque f est égale à la fréquence propre fo de l'oscillateur. C'est le
phénomène de résonance.
• L'amplitude des oscillations de l'oscillateur à la résonance est d'autant plus faible qu'il est plus amorti.
Application :
Connaissances et savoir-faire exigibles
Connaître les caractéristiques de la force de rappel exercée par un ressort.
Appliquer la deuxième loi de Newton au solide et effectuer la résolution analytique dans le cas d’un dispositif oscillant
horizontalement.
Connaître la signification de tous les termes intervenant dans la solution de l’équation différentielle et leur unité.
Connaître et savoir exploiter l’expression de la période propre, vérifier son homogénéité par analyse dimensionnelle.
Savoir-faire expérimentaux
Enregistrer un mouvement oscillant amorti.
Savoir mesurer une amplitude, une pseudo période.
Savoir faire varier l’amortissement.
Savoir montrer l’influence des paramètres masse et rigidité sur la période propre.
Savoir que la résonance mécanique se produit lorsque la période de l’excitateur est voisine de la période propre du
résonateur.
Savoir que l’augmentation de l’amortissement provoque une diminution de l’amplitude.
Connaître des exemples de résonance mécanique.
1
/
2
100%