adaptateurs d`énergie

Adaptateurs d’énergie 1-11 (JMC) 22/01/2016
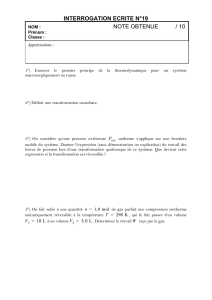
Transmettre
l’énergie
Transmettre un mouvement de
rotation
Transformer la nature d’un
mouvement de rotation
Obtenir une translation rectiligne
Accoupler deux arbres en
permanence
Accoupler / désaccoupler deux
arbres à volonté
Obtenir une translation rectiligne alternative
Obtenir une rotation intermittente
Transmettre par adhérence
Modifier ou non la vitesse
Transmettre par obstacle
Modifier ou non la vitesse
Accoupler sans désalignement
Accoupler avec désalignement
Assurer la transmission directe
Utiliser un lien de transmission
Assurer la transmission directe
Utiliser un lien de transmission
Entraîner sans glissement
Entraîner dans un seul sens
Entraîner avec glissement
Accouplement rigide
Accouplement élastique, d'Oldham, cardan
Embrayage à friction, centrifuge
Roue libre
Coupleur hydraulique
Roues de friction
Système poulies / courroie
Engrenages
Roues dentées / chaîne ou courroie crantée
Vis / écrou, Pignon / crémaillère
Bielle / manivelle, Excentrique, Cames
Croix de Malte
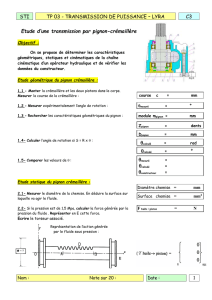
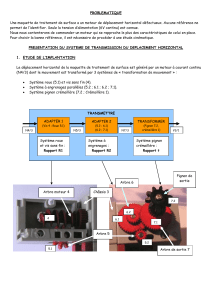
ADAPTATEURS D’ÉNERGIE
Lorsque l’on veut que l’énergie mécanique produite
par un actionneur aie des caractéristiques bien
précises (vitesse linéaire ou vitesse de rotation, force
ou couple à transmettre) on incorpore dans la chaîne
d’action des adaptateurs d’énergie mécanique.
On se limitera aux adaptateurs les plus utilisés :
- Adaptateurs d’énergie mécanique de rotation
autour d’un axe fixe sans modification de mouvement ;
- Adaptateurs d’énergie mécanique de rotation
autour d’un axe fixe en énergie mécanique de translation
rectiligne ;
- Adaptateurs d’énergie mécanique de translation
rectiligne en énergie mécanique de rotation autour d’un
axe fixe.
Energie
mécanique
Energie
mécanique
adaptée
Pertes par
frottement
ADAPTER
L’ENERGIE

Adaptateurs d’énergie 2-11 (JMC) 22/01/2016
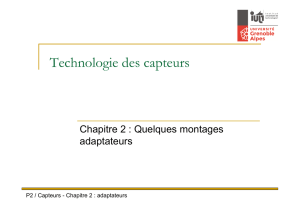
d
D
Puissance Mécanique:
- Cas de la TRANSLATION :
- Cas de la ROTATION :
- Rendement global :
Transmission par lien flexible : poulie - courroie
Arbres éloignés.
Transmission par
obstacles ou par
friction (courroie plate,
striée, crantées ou
trapézoïdale).
Très bon rendement.
Réversible.
Si non glissement
et rendement
D
d
d
D
Dd
dD
C
C
T tension brin tendu
t tension brin mou
( ).ddC T t R
Poulie
menante
Poulie
menée
x
θ
F
M
V
P = F.V
P = F . V .COS
- Force en Newtons
- Vitesse en Mètres/seconde
- Puissance en Watts
z
O
S
C
P = .C
- Couple en Newton.mètres
- Vitesse en radians/seconde
- Puissance en Watts
P1
Moteur
P2
1
Récepteur 1
Récepteur 2
2
P3
31. 2
1
=global Psortie P
Pentrée P

Adaptateurs d’énergie 3-11 (JMC) 22/01/2016
1
2
Transmission par lien flexible : pignon - chaîne
Arbres éloignés à axes
parallèles.
Transmission par
obstacles.
Très bon rendement.
Réversible.
:rendement du
mécanisme
21
12
d
d
21
12
C
C
T tension brin tendu
t tension brin mou
22( ).C T t R
Transmission par engrenage droit
Arbres rapprochés à
axes parallèles.
Très bon rendement.
Réversible.
21
12
z
rz
rC
C
1
2
r : rapport des vitesses
: rendement du
mécanisme
1
2

Adaptateurs d’énergie 4-11 (JMC) 22/01/2016
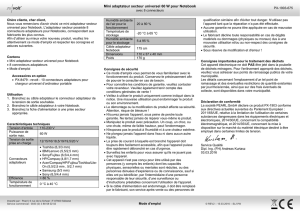
Transmission par train d’engrenages droits
Arbres rapprochés à axes
parallèles.
Très bon rendement.
Réversible.
Contact extérieur Contact intérieur
( 1 ) prod. r. menantes
prod. r. menées
n
gz
rz
rg :rapport global des
vitesses
n: nombre de contacts
extérieurs
:rendement du
mécanisme
sortie
gentrée
r
sortie
entrée g
C
Cr
1 22 32
21 31 4
( 1 )
n
global z z z
rz z z
Transmission par engrenages coniques
Arbres rapprochés à axes
concourants.
Bon rendement.
Réversible.
Sommets des cônes confondus
pour un bon fonctionnement.
2
1
1
2
z
z
r
rC
C
1
2
r :rapport des vitesses
:rendement du mécanisme
N4
Z1
Z22
Z31
Z32
Z4
N1
Z21
2
1

Adaptateurs d’énergie 5-11 (JMC) 22/01/2016
2
1
Transmission par engrenages à roue et vis sans fin
Arbres rapprochés à axes
orthogonaux.
Grande réduction possible.
Rendement médiocre.
Irréversible lorsque l’angle
d’inclinaison de l’hélice est petit.
2
1
1
2
z
z
r
rC
C
1
2
z1 : nbre de filets de la vis
z2 : nbre de dents de la roue
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%