PROBLEMATIQUE Une maquette de traitement de surface a un

PROBLEMATIQUE
Une maquette de traitement de surface a un moteur de déplacement horizontal défectueux. Aucune référence ne
permet de l’identifier. Seule la tension d’alimentation (6V continu) est connue.
Nous nous contenterons de commander un moteur qui se rapproche le plus des caractéristiques de celui en place.
Pour choisir la bonne référence, il est nécessaire de procéder à une étude cinématique.
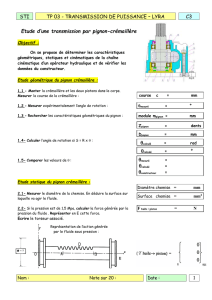
PRESENTATION DU SYSTEME DE TRANSMISSION DU DEPLACEMENT HORIZONTAL
1. ETUDE DE L’IMPLANTATION
Le déplacement horizontal de la maquette de traitement de surface est généré par un moteur à courant continu
(N4/3) dont le mouvement est transformé par 3 systèmes de « transformation de mouvement » :
Système roue (5.1) et vis sans fin (4).
Système à engrenages parallèles (5.2 ; 6.1 ; 6.2 ; 7.1).
Système pignon crémaillère (7.2 ; Crémaillère 1).
Arbre moteur 4
Arbre 5
Arbre de sortie 7
Arbre 6
Pignon de
sortie
TRANSMETTRE
ADAPTER 1
(Vis 4 ; Roue 5.1)
ADAPTER 2
(5.2 ; 6.1)
(6.2 ; 7.1)
TRANSFORMER
(Pignon 7.2,
crémaillère 1)
Système roue
et vis sans fin :
Rapport R1
Système à
engrenages :
Rapport R2
Système pignon
crémaillère :
Rapport t
N5/3
N4/3
N7/3
V3/1
Châssis 3
5.1
5.2
6.1
6.2
7.1
7.2
4

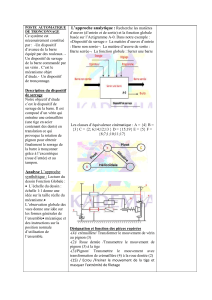
2. SCHEMA CINEMATIQUE.
Le schéma cinématique de la transmission horizontale est :
7
1
Arbre 7
Z7.1 = 44 ; m = 0,5
Z7.2 = 10 ; m 1,5
6
1
Arbre 6
Z6.1 = 44 ; m = 0,5
Z6.2 = 18 ; m = 0,5
5
1
Arbre 5
Z5.1 = 10 ; m = 1.5
Z5.2 = 14 ; m = 0,5
4
1
Arbre 4 (Arbre moteur).
Z4 = 1 filet
3
1
Carter 3
2
2
Essieu 2
Diamètre des roues : D = 30 mm
1
1
Bâti 1
Repère
Nb
Désignation Solidworks
Données
1
2
3
4
5
6
7
1
5.1
5.2
6.1
6.2
7.1
7.2
Schéma 1
1

TRAVAIL DEMANDE.
1/ Faites déplacer le chariot horizontalement et mesurez le temps mis pour effectuer la course maximum.
Temps mesuré = ………………….
2/ La course maxi étant de 280 mm, calculez la vitesse moyenne du chariot.
Vitesse moyenne = …………………….
3/ Lancez Solidworks et vérifiez que l’ensemble se trouve dans la configuration « mouvement horizontal »
Sous méca3D, créez les liaisons suivantes :
Liaison roue et vis sans fin entre les pièces 4 et 5.
Liaison engrenage entre les pièces 5 et 6
Liaison engrenage entre les pièces 6 et 7
Liaison pignon crémaillère entre les pièces 7 et 1
4/ Effectuez une étude cinématique en prenant comme liaison d’entrée la liaison glissière entre 3 et 1.
Remarque : cette liaison a été crée pour la circonstance.
Complétez le tableau suivant : (MECA 3D devra faire un calcul tous les dixième de seconde).
MECA 3D devra faire un calcul tous les dixième de seconde.
Effectuez la simulation du mouvement.

5/ A l’aide de méca3D consultez les résultats et complétez :
6/ A l’aide des résultats ci-dessus, calculez :
R1 = …………………………………………………………………………………………………………………………………….
R2 = …………………………………………………………………………………………………………………………………….
t = …………………………………………………………………………………………………………………………………….
7/ Calculez le rapport de transmission global T en fonction de R1, R2 et t
T = …………………………………………………………………………………………………………………………………….
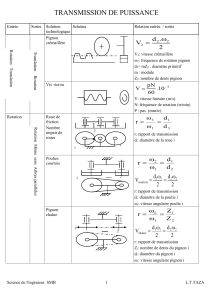
TRANSMETTRE
ADAPTER 1
(Vis 4 ; Roue 5.1)
ADAPTER 2
(5.2 ; 6.1)
(6.2 ; 7.1)
TRANSFORMER
(Pignon 7.2,
crémaillère 1)
Système roue
et vis sans fin :
Rapport R1
Système à
engrenages :
Rapport R2
Système pignon
crémaillère :
Rapport t (mm/tour)
N4/3 = …………………… tour/min
N7/3 = …………………… tour/min
V3/1 = …………………….… mm/min
N5/3 = …………………… tour/min
R1 = ……………………………..
R2 = …………………………..
t = ……………………………..
TRANSMETTRE
Système roue et vis sans fin + Système
à engrenages + Système pignon
crémaillère
Rapport T
N4/3
V3/1
T = ……………………………..

8/ Choisissez sur la documentation technique ci-dessous le moteur qui vous parait correspondre le mieux.
Le moteur choisi est : Référence (Code) : …………………………………………. Type : IGARASHI………………………………….
Choisissez le support moteur :
9/ Le moteur choisi a une vitesse N4/3 = ……………………… tour/min au rendement maxi. Déterminer, dans ce cas, la
vitesse de translation du chariot :
Par le calcul : V3/1 = …………………………………………………………………………………………………………………………………………………………..
.............................................................................................................................................................................................................
……………………………………………………………………………………………………………………………………………………………………………………………………….
A l’aide d’une simulation méca 3D en prenant comme liaison d’entrée, la liaison pivot moteur.
V3/1 = ………………………………………
10/ Déterminer le temps que mettra le système pour effectuer la course maximum.
Temps = ………………………………….
1
/
5
100%