Chapitre 17 Conversion des signaux modulation énergie

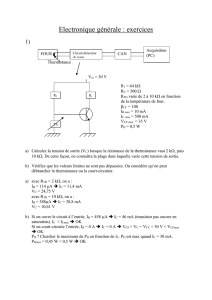
17
Conversion de signaux – Modulation de l’énergie
2697 T17-X
1
Chapitre 17
Conversion de signaux – Modulation de l’énergie
Perturbation et compatibilité électromagnétique
INTRODUCTION 3
1. LES FONCTIONS DE CONVERSION 4
1.1. La commutation 4
1.2. La temporisation 15
1.3. L’amplification 18
1.4. La comparaison 22
1.5. Le suiveur 24
1.6. L’additionneur – Le soustracteur 25
1.7. Le dérivateur – L’intégrateur 27
1.8. Exercices à résoudre 28
2. LES MODULATEURS D’ENERGIE 30
2.1. Le gradateur 31
2.2. Le redresseur non commandé 34
2.3. Le redresseur commandé 39
2.4. L’onduleur assisté 42
2.5. L’onduleur autonome 44
2.6. Le hacheur 46
2.7. Exercices à résoudre 50
3. LES PERTURBATIONS DES RESEAUX 52
3.1. Définitions 52
3.2. Effets des harmoniques 53
3.3. Perturbations sur le réseau triphasé 54

17
Conversion de signaux – Modulation de l’énergie
2697 T17-X
2
4. LA COMPATIBILITE ELECTROMAGNETIQUE 55
4.1. Définitions 55
4.2. Nature des perturbations 56
4.3. Origine des perturbations 56
4.4. Transmission des perturbations 57
4.5. Effets des perturbations 58
5. CORRECTION DES EXERCICES 61
5.1. Correction des exercices paragraphe 1.8 61
5.2. Correction des exercices paragraphe 2.7 63

17
Conversion de signaux – Modulation de l’énergie
2697 T17-X
3
INTRODUCTION
La mise au point de semi-conducteurs de puissance a permis le développement considérable de
l’électronique de puissance qui se situe à la frontière entre les domaines de l’électrotechnique (les
courants forts) et l’électronique (les courants faibles).
De nos jours l’électronique de puissance assure toutes les fonctions de conversion d’énergie et
permet facilement la modulation de l’énergie.
Dans ce chapitre nous allons étudier les fonctions de conversion des signaux en vue de modifier
les caractéristiques électriques d’un signal :
La fonction commutation c’est à dire l’autorisation ou l’interdiction de passage d’un courant
La fonction temporisation c’est à dire la création d’un retard dans le traitement d’un signal
La fonction amplification c’est à dire l’augmentation de la puissance pour traitement d’un signal
La fonction comparaison c’est à dire la confrontation de deux grandeurs électriques
La fonction suiveur c’est à dire l’adaptation d’un signal aux contraintes du circuit
La fonction additionneur c’est à dire l’addition de deux grandeurs électriques
La fonction soustracteur c’est à dire la soustraction de deux grandeurs électriques
La fonction dérivateur c’est à dire l’amélioration du temps de réponse d’un signal
La fonction intégrateur c’est à dire la diminution du temps de réponse d’un signal
Ensuite nous allons étudier les modulateurs d’énergie permettant de gérer l’énergie nécessaire
pour la commande des systèmes électriques :
Le gradateur qui transforme l’énergie alternative fixe en énergie alternative variable
Le redresseur non commandé qui transforme l’énergie alternative fixe en énergie continue fixe
Le redresseur commandé qui transforme l’énergie alternative fixe en énergie continue variable
L’onduleur assisté qui transforme l’énergie continue en énergie alternative fixe
L’onduleur autonome qui transforme l’énergie continue en énergie alternative variable
Le hacheur qui transforme l’énergie continue en énergie continue variable
Nous verrons enfin que l’utilisation de plus en plus fréquente de ces modulateurs est une source
importante de perturbations sur les réseaux électriques et qu’il est donc nécessaire de prendre
quelques précautions.
La réglementation mise en place tend à limiter le niveau de ces perturbations et fait l’objet d’une
norme : la compatibilité électromagnétique.

17
Conversion de signaux – Modulation de l’énergie
2697 T17-X
4
1. LES FONCTIONS DE CONVERSION
1.1. La commutation
La commutation est l’ouverture et/ou la fermeture d’un circuit. Elle autorise ou interdit le passage du
courant électrique dans les deux sens bidirectionnel ou seulement dans un seul sens unidirectionnel.
La solution technologique est assurée par des composants électroniques de puissance qui jouent le rôle
d’interrupteurs statiques (pas d’usure mécanique).
Ce sont des composants à semi-conducteurs commandables ou non-commandables.
Nous distinguerons quatre composants qui sont :
•
la diode
•
le thyristor
•
le transistor
•
le triac
1.1.1. La diode
En électronique de puissance, on ne prendra en compte que la diode à jonction utilisée comme diode
de redressement.
Symbole
La diode utilisée en sens direct & la diode utilisée en sens inverse
Sens direct : la diode passante provoque Sens inverse : la diode bloquée
une petite chute de tension V
F
peut être assimilée à un
elle se comporte presque interrupteur ouvert
comme un interrupteur fermé
en sens direct l’indice est F pour forward en sens inverse l’indice est R pour Reverse
La diode est un composant unidirectionnel
Constitution d’une diode à jonction On « dope » la zone P avec des atomes
trivalents (Bore, Alu) qui sont receveurs ou
déficitaires (ils leur manquent un électron sur
la couche périphérique.
Dans la zone N, on utilise des atomes
pentavalents (phosphore,arsenic) qui sont
donneurs ou excédentaires (un électron
supplémentaire à la périphérie).
Le courant passera de P vers N, mais pas en sens inverse.
anode
cathode
A
K
ZONE P
(déficitaire
en électrons)
Zone N
(excédentaire
en électrons)
anode cathode
jonction
A
K
V
AK
> 0,7 V
I
-
+
A
K
V
AK
< 0 V
I = 0
-
+

17
Conversion de signaux – Modulation de l’énergie
2697 T17-X
5
Caractéristiques d’une diode :
En direct : I
f
= f(V
f
) & en inverse : I
R
= f(V
R
)
En sens direct, la pente de la partie
verticale est due à la « résistance
dynamique » de la diode :
Les grandeurs fondamentales
Les trois critères principaux de choix d’une diode sont :
•
I
0
le courant direct moyen
•
V
RRM
la tension inverse de crête répétitive
•
Le type de boîtier
Celui-ci peut-être en verre, en matière plastique ou métallique. Dans ce cas, si l’on ne précise pas, la
cathode est reliée au boîtier. Si l’anode est au boîtier, la référence est suivie du suffixe (R).
Quelques types de boîtiers :
I
f
(de 1 à quelques
centaines d’Ampères)
V
f
V
R
I
R
(quelques mA)
0
Tension
de claquage (de quelques centaines
à plusieurs milliers de volts)
Tension de
seuil
( ≈
≈≈
≈ 0,7 V)
Remarque
Les échelles sont très
différentes pour V
f
et V
R
La diode est bloquée
La diode
est passante
I
f
V
f
0
I
f 2
I
f 1
V
f 2
V
f 1
V
f 2
- V
f 1
I
f 2
- I
f 1
V
f 2
- V
fseuil
I
f 2
R
d
= =
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
1
/
64
100%