Cours de capteurs industriels (magnétiques)

1
Capteurs magnétiques
Eric Vourc’h
eric.vourch@satie.ens-cachan.fr
Ecole normale Supérieure de Cachan
Laboratoire SATIE SATIE
MASTER CIMES
Capteurs, Instrumentation et Mesures
UE 5AC02
Capteurs Industriels

2
Champs
biomagnétiques
80 T Bobine supra. pulsée
2 T Electroaimant
10mT Câble électrique
50µT Champ magnétique
terrestre
1µT Bruit urbain
0.1nT Cœur humain
10fT Cerveau humain
Champs liés à
l’activité
industrielle
15 ordres de grandeur justifie la variété de technologies de capteurs
Introduction
Grandeur Unités
Induction
magnetique B Tesla
(T) Gauss (G)
1G = 10-4 T
Champ
magnetique H A.m-1 Oersted (Oe)
1 A.m-1 = 4.pi.10-3Oe
Flux
magnétique T.m2 Weber (Wb)
1T.m2 = 1 wb

3
Plan du cours
Les capteurs magnétiques peuvent être utilisés directement pour des mesures de
champs, mais aussi pour des mesures de distances, de vitesses, pour des mesures de
courants, pour la détection de pièces métalliques, pour du contrôle non destructif…
Introduction
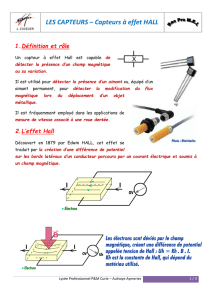
• Introduction
• Capteurs inductifs
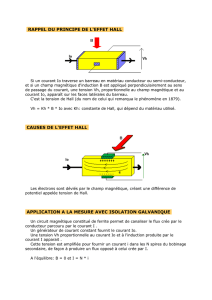
• Capteurs de Hall
• Rappels sur le magnétisme
• Magnétorésistances anisotropes (AMR)
• Magnétorésistances géantes (GMR)
• FluxGates

4
Introduction
Un capteur fait généralement partie d’une chaine de mesure dans laquelle sa
grandeur de sortie subit un conditionnement destiné à ce que la mesure (ou signal
de sortie) donne une estimation optimisée du mesurande.
Mesurande Mesure
Conditionnement Capteur
B0cosw0t
Ampli d’instrumentation v(t)=KB0sinw0t+b(t)
Coeff .lié au
gain de l’ampli
Bruit (signal parasite intrinsèque
aux capteur ou à l’électronique
de conditionnement)

5
Dynamique de mesure : différence entre les valeurs extrêmes
mesurables par le capteur pour une marge d’erreur fixée.
Résolution : plus petite valeur que le capteur est en mesure
d’identifier. La résolution est liée au bruit.
Sensibilité : facteur de proportionnalité entre le signal de sortie du
capteur et la grandeur mesurée (en V/T par exemple).
Bande passante : gamme de fréquence où le capteur fonctionne. Elle
est caractéristique de la rapidité du capteur.
Coût
Encombrement
Facilité de mise en oeuvre
Diverses dérives : Sensibilité à la T°, offset.
Caractéristiques déterminantes dans le choix d’un capteur de champ
Introduction
Les technologies de capteurs de champ sont variées, le bon choix dépend de
l’application visée et des contraintes que l’on se fixe…
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
1
/
137
100%