Interruption des circuits alimentés en courant continu

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique D 4 700 − 1
Interruption des circuits alimentés
en courant continu
par Yves PELENC
Directeur Scientifique honoraire Merlin Gerin
Ancien Professeur à l’Institut National Polytechnique de Grenoble
Réédition actualisée de l’article paru en 1988
’utilisation du courant continu reste pour le moment peu répandue en haute
tension. Toutefois, l’étude des phénomènes liés à son interruption constitue
un préalable dont les vertus pédagogiques sont irremplaçables pour aborder,
dans les meilleures conditions, la compréhension des problèmes de coupure en
courant alternatif.
L’appareillage électrique d’interruption à courant alternatif à haute tension est
traité dans les fascicules [D 4 690] à [D 4 698].
1. Problématique de l’interruption
des courants continus ............................................................................ D 4 700 - 2
2. Modélisation du comportement dynamique de l’arc..................... — 6
3. Pointe d’extinction .................................................................................. — 9
4. Temps de coupure.................................................................................... — 11
5. Énergie de coupure.................................................................................. — 12
6. Utilisation d’un condensateur en parallèle sur l’arc...................... — 13
7. Avenir du transport en courant continu à haute tension............. — 16
L

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
INTERRUPTION DES CIRCUITS ALIMENTÉS EN COURANT CONTINU ______________________________________________________________________________
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
D 4 700 − 2© Techniques de l’Ingénieur, traité Génie électrique
1. Problématique de
l’interruption des
courants continus
1.1 Interruption d’un courant continu
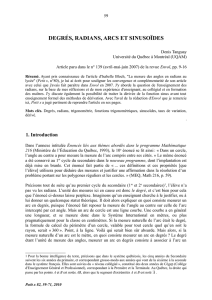
Examinons le cas, apparemment le plus simple, d’un circuit
inductif (R, L) alimenté en courant continu (figure 1 a).
Pour réaliser l’interruption du courant parcourant ce circuit, il faut
et il suffit que la résistance r de l’interrupteur, supposée initialement
nulle, croisse et devienne infinie (figure 1 b) ou, en d’autres termes,
que sa conductance diminue, puis s’annule. Lorsque cette condition
unique est réalisée, l’appareil, devenu isolant, n’est plus traversé
par aucun courant.
■La loi de variation de la résistance de l’interrupteur peut, à pre-
mière vue, être quelconque. Toutefois, le raisonnement et le calcul
montrent que l’énergie dépensée sous forme d’effet Joule dans
l’interrupteur au cours de la coupure est d’autant plus faible que la
variation de la résistance de ce dernier est plus rapide. On a donc
intérêt à agir dans ce sens.
Cependant, même si cette variation est infiniment rapide, on
constate qu’il faut néanmoins dépenser dans l’interrupteur la tota-
lité de l’énergie électromagnétique emmagasinée initialement dans
l’inductance propre du circuit, soit .
Cette constatation logique est absolument essentielle dans les
problèmes d’interruption des courants continus ; un critère minimal
de bon fonctionnement est donc que l’interrupteur doit pouvoir
absorber sans dommage cette énergie, qui est souvent considéra-
ble.
■Ce critère, s’il est primordial, n’est pas le seul. Il en existe au
moins un autre d’importance. Si, en effet, la variation de résistance
est infiniment rapide, celle du courant l’est également et, en consé-
quence, la force électromotrice induite (L di/dt) dans l’inductance
propre du circuit devient infiniment grande. Cette surtension illimi-
tée est évidemment inadmissible.
■Il faut évidemment se fixer une limite à ne pas dépasser pour la
valeur de la surtension. Une fois cette limite définie, la loi de varia-
tion de la résistance se trouve imposée et le problème est théorique-
ment résolu. L’énergie dépensée au cours de la coupure est alors
supérieure à l’énergie électromagnétique du circuit, sans dépasser
généralement le double de cette valeur.
Dans la pratique, la résistance variable r est constituée par un arc
électrique. Les semi-conducteurs de puissance, de type transistor
ou GTO, ne peuvent être utilisés actuellement, dans des conditions
économiques raisonnables, que sur des circuits de faible puissance,
n’excédant pas quelques centaines de kilowatts.
1.2 Caractéristique d’arc
Nous savons que, si l’on porte sur un diagramme la chute de ten-
sion u dans un arc en fonction du courant i qui le traverse (supposé
stabilisé ou lentement variable), on obtient une caractéristique sta-
tique qui dépend de tous les paramètres déterminant le fonctionne-
ment de l’arc en question :
— nature et forme des électrodes ;
— nature et pression du gaz plasmagène dans lequel l’arc se
développe ;
— conditions de fonctionnement auxquelles est soumis cet arc
(soufflage, turbulence, déplacement sous l’effet de champs magné-
tiques, etc.) ;
— longueur de l’arc, etc.
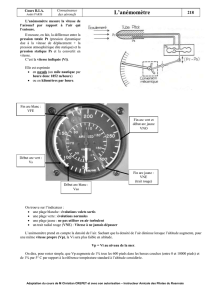
La caractéristique statique présente généralement une allure
hyperbolique, la tension passant parfois par un minimum puis crois-
sant ensuite légèrement en fonction du courant (figure 2).
Si l’on ne fait varier que la longueur de l’arc, on obtient toute
une famille de caractéristiques, chacune d’elles correspondant à une
longueur donnée.
Pour un arc libre brûlant dans l’air à la pression atmosphérique,
Herta Ayrton a proposé, à la fin du XIXe siècle, une formule empiri-
1
2
--- LI2
Figure 1 – Interruption d’un courant continu
Figure 2 – Caractéristiques statiques d’arc pour trois longueurs
différentes d’arc
0
∞
RL
E
+Interrupteur
Énergie de coupure :
- la première intégrale dépend du temps
t
E de coupure
- la seconde intégrale représente l'énergie électromagnétique :
t
E
0
ri
2 d
t
=
t
E
0
(
E
–
Ri
)
i
d
t
–0
I
Li
d
i
0
I
Li
d
i
=
L
I2
1
2
0
i
t
I
i
0
r
t
r
variation des paramètres
b
circuit inductif : schéma
a
0
u
i
3
2
1
3 > 2 > 1

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
______________________________________________________________________________ INTERRUPTION DES CIRCUITS ALIMENTÉS EN COURANT CONTINU
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique D 4 700 − 3
que célèbre donnant grossièrement la chute de tension u en fonc-
tion du courant i et de la longueur de l’arc :
(1)
Dans une représentation hyperbolique de la caractéristique, U0
constitue le seuil de tension d’arc et P0 la partie constante de la puis-
sance de refroidissement.
Cette formule est acceptable dans une plage de courant limitée à
quelques centaines d’ampères.
1.3 Interruption d’un circuit résistant
et inductif
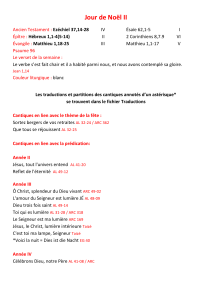
C’est le cas le plus général rencontré en courant continu, en parti-
culier lors de l’apparition d’un court-circuit.
Durant l’interruption, la loi d’Ohm donne, à chaque instant, une
relation entre les diverses grandeurs en présence (figure 3) :
(2)
d’où :
(3)
On constate que le signe de la chute inductive ∆u définit le sens de
variation du courant : si ∆u est positif, i augmente et inversement.
Dans un plan (u, i), la droite E − Ri est dénommée droite de
charge.
■Si nous supposons que la tension d’arc est donnée, pour chaque
valeur de i, par la caractéristique statique, nous constatons que, tant
que l’arc est suffisamment court (longueur ) pour que sa caracté-
ristique présente des points d’intersection (A et B) avec la droite de
charge, il existe un point de fonctionnement stable A et la coupure
ne peut se réaliser.
En effet, au point A, ∆u est négatif pour les valeurs de i supérieu-
res à IA, mais il devient positif lorsque i est inférieur à IA. Le courant
va donc se stabiliser à IA.
Il existe donc, en courant continu, une caractéristique mini-
male d’arc au-dessous de laquelle l’interruption ne peut pas être
obtenue (si le circuit ou l’appareil ne comporte aucun artifice per-
mettant de faciliter la coupure). Notons que cette caractéristique
minimale ne dépend que de la force électromotrice E et de la résis-
tance R, et non de l’inductance L, qui joue en revanche un rôle fon-
damental vis-à-vis du temps de coupure et de l’énergie dépensée
dans l’arc.
■Dans la réalité, la forme hyperbolique de la caractéristique n’est
véritablement significative qu’au-dessous d’une centaine d’ampè-
res, pour un arc fonctionnant dans l’air atmosphérique.
Il en résulte que, aux fortes intensités de courant, on observe plu-
tôt une sorte de palier de tension.
●Si l’on suppose que la caractéristique se résume pour l’essen-
tiel (cf. relation (1)) à :
u = U0
le problème de la coupure d’un courant continu est relativement
simple : le palier de tension d’arc U0 doit être égal ou supérieur à la
tension E du générateur, sinon il n’y a pas coupure (figure 4).
●Si nous supposons, en revanche, que la caractéristique statique
peut être assimilée à une simple hyperbole :
ui = P0
nous constatons que la caractéristique minimale correspond à une
puissance de refroidissement constante P0 égale au quart de la
Exemple : si l’arc est amorcé horizontalement dans l’air entre deux
électrodes en cuivre de 3 mm de diamètre, les paramètres de cette
relation ont sensiblement pour valeurs :
A = 30 V ; B = 10 V/cm ; C = 10 VA ; D = 30 VA/cm
On en conclut immédiatement que l’interruption ne peut pas
s’achever tant que l’arc n’est pas suffisamment développé pour
que sa caractéristique soit tout entière située au-dessus de la
droite de charge E − Ri.
Lorsque cette condition se trouve réalisée (longueur ), ∆u
est négatif pour toutes les valeurs du courant et ce dernier ne
peut que décroître jusqu’à s’annuler.
uABCD+
i
------------------++ U0
P0
i
------+==
ERi–L di
dt
------u–– 0=
L di
dt
------ERi–()u–∆u==
′
Figure 3 – Coupure d’un circuit résistant et inductif
Figure 4 – Caractéristique statique d’un arc de forte puissance
RL
E
+
u
i
E
–
Ri
caractéristique statique
b
schéma
a
IA
0
u
i
B
A
'
∆
u
∆
u
∆
u
+
–
–
–
E
–
Ri
E
R
E
0
u
E
i
I
U
0
E
–
Ri
La puissance de refroidissement peut se représenter par :
P
–
P
0 +
U
0
i

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
INTERRUPTION DES CIRCUITS ALIMENTÉS EN COURANT CONTINU ______________________________________________________________________________
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
D 4 700 − 4© Techniques de l’Ingénieur, traité Génie électrique
puissance apparente EI du circuit, c’est-à-dire au produit de la ten-
sion E du générateur par le courant établi I (figure 5) :
P0 = 0,25 EI(4)
En courant alternatif, les puissances de refroidissement
nécessaires (et, par conséquent, les énergies de coupure) sont com-
parativement beaucoup plus faibles.
●Au-delà de cette caractéristique minimale, l’interruption est
d’autant plus rapide que l’écart ∆u entre la tension d’arc et la droite
E − Ri est plus grand et que l’inductance propre L du circuit est plus
faible, puisque :
1.4 Surtensions de coupure
Nous avons vu au paragraphe 1.1 qu’une coupure trop rapide
entraînait automatiquement une surtension L di/dt, qui risquait
d’être dangereuse pour le matériel et le personnel.
Dans la pratique on s’efforce de provoquer, au début de la cou-
pure, un allongement aussi rapide que possible de l’arc. Tant que
cette longueur est insuffisante, la caractéristique statique coupe la
droite E − Ri.
Lorsque la longueur d’arc est devenue suffisante pour autoriser la
coupure, on maintient constante cette longueur d’arc pour limiter la
surtension (figure 6). On constate en effet que, pour une large plage
de valeurs du courant et pour une longueur d’arc donnée, la tension
d’arc (figure 4) reste sensiblement constante, sauf lorsque le cou-
rant devient très faible.
Peu avant l’annulation du courant, on observe effectivement une
surtension dénommée pointe d’extinction, dont la valeur est
d’autant plus grande que l’allongement de l’arc est plus important
(figure 7).
1.5 Limitation de la valeur maximale
du courant de court-circuit
■Dans la plupart des circuits alimentés en courant continu, l’induc-
tance est importante et la constante de temps du réseau L/R est sou-
vent un multiple du temps d’ouverture du disjoncteur de protection
(L/R représente couramment 10 à 15 ms).
Si l’ouverture des contacts se produit très rapidement, dès que
l’on détecte les premiers signes d’apparition d’un défaut, l’interrup-
tion peut avoir lieu avant que le courant de court-circuit ait atteint sa
valeur maximale ; on dit que l’appareil se comporte en limiteur.
Figure 5 – Puissance minimale de coupure pour une caractéristique
statique hyperbolique
On a donc intérêt à concevoir la chambre de coupure de
l’appareil de telle sorte que la longueur maximale de l’arc soit
imposée, autorisant la coupure mais limitant la surtension. C’est
sur ces principes que sont réalisés les disjoncteurs BT ainsi que
les disjoncteurs HT utilisés pour la traction électrique à courant
continu en 1 500 V.
0
u
E
E
/2
i
II/2
E
–
Ri
P
0 = 0,25
E
I
di
dt
------∆u
L
-------=
Figure 6 – Coupure avec allongement limité de l’arc
Figure 7 – Coupure dynamique en courant continu
0
u
;
i
E
I
t
U
0
PE
u
i
Temps
d'allongement
Au début de la coupure, on provoque un allongement rapide de l'arc
jusqu'à une longueur telle que la tension d'arc atteigne un palier
U
0
légèrement supérieur à
E
. Cette longueur autorise la coupure sans
entraîner de surtension excessive. Une légère surtension dite
pointe
d'extinction
(PE) apparaît lorsque le courant approche de zéro.
0
u
E
i
I
E
–
Ri
ui
=
P
Si l'arc ne possédait aucune inertie thermique, la caractéristique
dynamique réelle, lors d'une coupure, serait confondue avec la
caractéristique statique (en trait mixte) et, à l'approche du zéro
de courant, on observerait une surtension infinie :
Fort heureusement, l'inertie de l'arc empêche que sa résistance ne
croisse infiniment vite :
et la tension d'arc passe par un maximum dénommé
pointe
d'extinction
; dans cette exemple :
u
=
ri
u
= 2
E
u
=
P
i
2E

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
______________________________________________________________________________ INTERRUPTION DES CIRCUITS ALIMENTÉS EN COURANT CONTINU
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique D 4 700 − 5
Pour obtenir ce résultat, il est nécessaire de développer rapide-
ment une tension d’arc qui soit supérieure à la différence (E − Ri)
entre la force électromotrice du générateur et la chute ohmique.
Lors de l’apparition d’un court-circuit, on constate que, à partir du
moment où la tension d’arc u dépasse (E − Ri), le courant ne peut
que décroître. Si cette condition est obtenue assez rapidement, le
courant n’a pas le temps d’atteindre sa pleine valeur et l’appareil
fonctionne en limiteur (figure 8).
Dans l’article [D 4 690] « Appareillage électrique d’interruption à
courant alternatif à haute tension » nous verrons que, en courant
alternatif, les fusibles ont souvent un comportement limiteur. Les
fusibles HT ont la possibilité de développer rapidement des tensions
d’arc suffisantes pour obtenir l’effet de limitation qui leur permet
d’éliminer des défauts de valeurs présumées très supérieures à cel-
les qu’ils ont effectivement à maîtriser.
■Nous verrons par la suite (§ 1.6, § 6 et § 7.3) que, selon la nature
des circuits à commander et la valeur des courants à interrompre, il
est possible d’utiliser divers artifices pour faciliter la coupure et limi-
ter les surtensions de manœuvre :
—résistance en parallèle sur l’appareil ;
—condensateur en parallèle sur l’arc ;
—superposition d’un courant oscillatoire pour la coupure des
lignes à courant continu THT.
Nous allons commencer par l’examen, fort instructif, de la résis-
tance en parallèle sur l’appareil.
1.6 Utilisation de résistances en parallèle
sur l’appareil pour faciliter la coupure
1.6.1 Généralités
Il est bien connu que la présence d’une résistance R1 en parallèle
sur l’arc aide à la coupure.
Les équations du circuit de la figure 9 sont la relation (2) :
et les équations :
u = R1i1(5)
i = i1 + ia(6)
On constate qu’un arc dont la longueur serait insuffisante pour lui
permettre de réaliser seul la coupure (P0 = 0,2 EI) peut y parvenir
Figure 8 – Coupure en courant continu avec limitation de courant
05101520
0
0,1
0,2
0,3
i
limité
i
I
0
0,5
1
1,5
u
E
t
θ
0 0,2 0,4 0,6 0,8
t
L
/
R
u
E
i
i
présumé
0 0,1 0,2 0,3
0
1
2
3
i
limité
u
E
i
I
E
+
Ri
ui
=
P
Le courant présumé représente le courant de court-circuit qui
s'établirait si l'appareil n'intervenait pas et qui atteindrait I =
E
/
R
P
=
P
0 +
U
0
i
P
0 = 0,1
E
I
U
0 =
E
θ
L
/
R
1
25
=
représentation dans le plan (
u
,
i
)
b
évolution du courant et de la tension en fonction du temps
a
Figure 9 – Coupure d’un circuit inductif avec résistance en parallèle
sur l’arc
R
R
1
i
1
L
E
+
u
ii
a
u
i
1 =
u
R
1
R
1
i
1
u
E
i
a
E
–
Ri
E
R
1
i
1
E
R
+
R
1
E
R
u
i
=
i
1 +
i
a
I =
E
–
Ri
ui
=
P
J
L'arc s'éteint
caractéristiques
b
schéma du circuit
a
Loi d'Ohm :
L
= (
E
–
Ri
) –
u
= ∆
u
d
i
d
t
Loi de Kirchhoff :
i
=
i
1 +
i
a =+
i
a
u
R
1
ERi–L di
dt
------u–– 0=
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%