Modélisation d`une machine à courant continu Cadre du document

Modélisation d'une machine
à courant continu
Cadre du document
Dans ce document, on s'intéresse uniquement au modèle d'une machine à courant continu et à son
interaction électro-mécanique. Il ne s'agit pas d'un cours complet sur la constitution, ni sur le
principe de fonctionnement.
1. Constitution, principe de fonctionnement : notions...
La MCC (machine ou moteur à courant continu) se compose comme tous les moteurs, d'une partie
fixe, le stator, et d'une partie mobile en rotation, le rotor. Sur la figure 1, on observe une vue interne
du moteur. La légende Stator:bobinage doit se lire bobinage appartenant au Stator.
T.Rocacher 1/5
Rotor : Bobinage
Rotor : Axe
Stator : bobinage
Rotor : collecteur
Stator : balais
Figure 1 : vue éclatée d'un moteur, cas particulier d'un stator équipé
d'un bobinage

La figure 1 montre la vue éclatée d'un moteur cc. Il s'agit d'un moteur dont l'excitation magnétique
au stator est faite par un bobinage (principe d'un électro-aimant).
Le bobinage peut aussi être remplacé par une paire d'aimants, Nord et Sud comme le montre la
figure 2.
Enfin observons une dernière figure, la figure 3, qui montre les grandeurs physiques mises en jeu :
Principe de fonctionnement (notion) :
Les enroulements statoriques créent un champs magnétique Bs. Le courant IM, injecté dans le rotor
(bien souvent on dit le courant d'induit) interagit avec le champs Bs pour créer une force de Laplace
(voir figure 3). Le rotor se met alors à tourner. La transformation de l'énergie électrique en énergie
mécanique se joue dans l'entrefer (espace très mince entre rotor et stator).
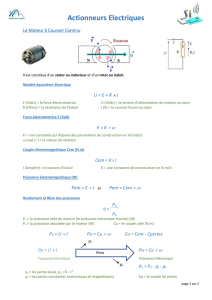
2. Modélisation électrique
Au moment où le courant prend naissance dans le rotor, un couple est exercé comme on vient de le
voir et le moteur tourne. Mais réciproquement, le rotor tournant, il devient le siège d'une force
contre électromotrice E, qui s'oppose au courant qui a donné naissance à la rotation.
T.Rocacher 2/5
Fig 2 : photo d'un stator à aimants permanents
Fig 3 : vue simplifiée en coupe d'un MCC

Plus le rotor tourne vite, plus E augmente. Le modèle du moteur est alors le suivant :
Un moteur de qualité possède une résistance de très faible valeur.
3. Transformation électro-mécanique
Le moteur est typiquement un convertisseur d'énergie « dynamique ». Il convertit une énergie
électrique en énergie mécanique et inversement.
C'est au niveau de l'entrefer que se situe la transformation d'énergie. La rotation est uniquement due
à la puissance électromagnétique transmise :
Pem=E.IM
[W]
La puissance que l'on récupère au niveau de l'entrefer sur le rotor est:
Pmeca=Ω .Γem
[W] avec
: vitesse angulaire du rotor [rad/s]
em: couple utile sur l'arbre [N.m]
Faisons un bilan de puissance :
T.Rocacher 3/5
UM
IM
UM
IM
R
L
E
Pelec = UM.IM
Pj = R.IM2
Pem = E.IM
puissance
effectivement
transformée
Transformation
dans l'entrefer
Pem = . em
puissance
perdue par
effet Joule
puissance
perdue par
frottement des
roulement à
billes ou des
paliers
Pu = . u
puissance
effectivement
disponibe sur
l'arbre
Le coefficient de proportionnalité entre
E et , vitesse angulaire du rotor, est
fonction du flux magnétique statorique,
on le note K :
E = K . (eq. 1).
Fig 4 : Modélisation électrique
du moteur
Fig 5 : Bilan de puissance du moteur

On distingue deux types de pertes :
–électrique (dans la résistance)
–mécanique (due aux frottements au niveau des paliers)
Il existe aussi des pertes par courant de Foucault ou hystérésis qu'on regroupe habituellement dans
les pertes mécaniques. L'ensemble de ces pertes est nommé perte collective.
4. Modélisation électro-mécanique
Intéressons nous à la transformation électromagnétique :
Il y a égalité des puissances :
Pem = E.IM = . em
On en déduit la relation couple / courant grâce à l'éq. 1:
K . .IM = . em em = K .IM (eq. 2)
Dans le cas où on peut négliger les pertes mécaniques, on pourra écrire : u = K .IM.
5. pilotage d'une MCC
Sur une petite MCC (de l'ordre de quelques Watts), la commande peut être faite n'importe comment.
En effet, sur ce genre de moteur la résistance série R est usuellement assez élevé (quelques Ohms).
Donc une attaque en tension directe via un hacheur est tout à fait acceptable.
Dans le cas d'une MCC de moyenne puissance et plus encore pour de fortes puissances, il est
INTERDIT d'attaquer une MCC en tension (typiquement en agissant directement sur le rapport
cyclique d'un hacheur).
T.Rocacher 4/5
Pem = E.IM
Transformation
dans l'entrefer
Pem = . em

En effet, prenons le schéma d'attaque en tension suivant, avec des chiffres :
En régime permanent, le courant IM est constant ce qui fait que la
tension aux bornes de l'inductance est nulle.
La tension aux bornes de R vaut 0,5V. Le courant vaut donc 5A.
Imaginons que subitement on impose 10V.
L'inertie mécanique empêche la fcem E de varier rapidement. La
constante de temps électrique, L/R valant 10ms, le courant permanent va très vite s'établir. Ce
dernier vaudra donc (10-20) / 0.1 = -100A ! …
6. Résumé
On retiendra le modèle électrique du moteur :
Les équations fondamentales électromagnétiques :
E = K .
em = K .IM
Lorsqu'on impose une tension à une MCC, en régime permanent (hors accélération / freinage):
–La vitesse est imposée (plus ou moins directement) par la tension appliquée
–Le courant est fixé par la charge mécanique appliquée à l'arbre
Lorsqu'on impose un courant à une MCC en régime permanent :
–le couple est imposé par le courant donc par la commande électrique
–la vitesse est fixée par la charge mécanique appliquée à l'arbre
Sur des moteurs dont la puissance dépasse quelques dizaines de Watt,
une commande en courant est obligatoire.
T.Rocacher 5/5
UM
IM
R
L
E
UM
IM
UM
IM
R=0.1
L= 1m
E=20V
E=20,5V
0,5V
1
/
5
100%