les redresseurs monophases

Chapitre IV – Les redresseurs monophasés -
LES REDRESSEURS MONOPHASES
I- Introduction :
Les redresseurs sont conçus pour fournir une tension continue fixe ou variable. Nous étudierons les
redresseurs monophasés non commandés et commandés, constitués respectivement de diodes et de
thyristors.
Pour comprendre le fonctionnement de ces convertisseurs statiques, nous utiliserons les
caractéristiques idéales des interrupteurs semi-conducteurs.
Applications des redresseurs : appareils HI-FI, Alimentation de machines à courant continu, ...
II- Méthodologie d'étude :
L'étude d'un montage se fait en 4 étapes :
Connaître l'état des interrupteurs -ouvert ou fermé- au démarrage.
Tracer le schéma équivalent du ou des circuits pour chaque séquence de fonctionnement.
Établir les équations différentielles qui régissent le fonctionnement du système. Ne pas
oublier les éventuelles conditions initiales.
Résolution des équations différentielles.
On répète cette séquence jusqu'à ce que :
un courant s'annule dans une diode ou un thyristor,
ou une tension met en conduction une diode, cad que cette tension est positive,
ou un thyristor reçoit une impulsion et le met en conduction. Ce qui veut dire que la tension
aux bornes du thyristor est positive.
ATTENTION : Dans ce type d'analyse on considère les interrupteurs comme parfait, et on ne
s'intéresse qu'aux mises en conduction et aux conditions de blocage.
III- Redresseurs non commandés :
A- Redresseurs Double Alternance (Pont de diodes) :
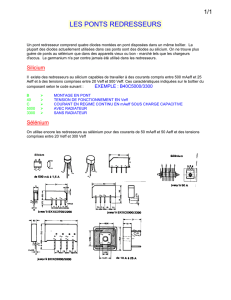
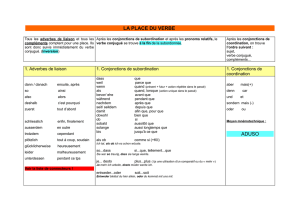
Le schéma de la Figure 1 représente un redresseur à diodes appelé aussi Pont de Graëtz ou
PD2.
1- Fonctionnement :
Les diodes deviennent passantes quand la tension à leurs bornes devient positive
(VA–VK>0 V).
Les diodes se bloquent lorsque le courant les traversant s’annule ou est dévié dans une autre branche
du circuit.
Fait sous Linux et OpenOffice/Staroffice page 1/14
Figure 1 : Redresseur en pont sur charge résistive.
v(t)
iCh(t)
iD1(t)
vCh(t)
D1
D2
D3
D4
i(t)
VD1
R

Chapitre IV – Les redresseurs monophasés -
La charge ne comportant pas de source de tension, D1 et D4 sont passantes quand v(t) > 0 V (v(t) est
donnée par la Figure 1).
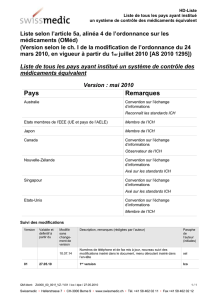
La charge n’étant constituée que d’une résistance, le courant iCH(t) a la même allure que la tension
vCH(t), c’est à dire qu’à la fin de l’alternance positive, iCH(t=T/2) = 0A. A cet instant, les diodes D1 et
D4 se bloquent.
Lors de l’alternance négative de v(t), les diodes D2 et D3 sont passantes.
L’objectif de la suite du paragraphe est de tracer les tensions et courants de la charge et d’une diode.
Pour cette étude, nous émettons l’hypothèse que les diodes sont idéales.
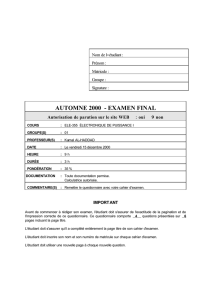
Les schémas partiels de fonctionnement des alternances positive et négative sont donnés sur la ???.
1- Alternance positive :
Durant cette alternance les diodes sont dans les positions :
•D1 : "ON",
•D4 : "ON",
•D2 : "OFF",
•D3 :"OFF".
–Si nous considérons que le signal d'entrée s'écrit sous la forme
vt=
2.Veff .sin .t
, la
maille active du circuit est composée de : la source v(t), des diodes D1 et D4, et de la charge R,
vt=vD1 tvch tvD4 t
.
–Si nous considérons les diodes D1 et D4 parfaites (
VD1=VD4≈0V
), nous retrouvons sur la
charge la totalité du signal d'entrée
vch t=vt
.
–Il est maintenant parfaitement possible de déterminer le courant qui circule dans la charge
ich t=vch t
R=vt
R=iD1 t=it.
Ce courant est identique au courant qui transite dans la
diode D1 et qui est fournis par la source.
2- Alternance négative :
Durant cette alternance les diodes sont dans les positions
•D1 "OFF",
•D4 "OFF",
•D2 "ON",
•D3 "ON".
Le fonctionnement de cette alternance est en tout point identique au fonctionnement de l'alternance
positive, si ce n'est le signe vu de la charge.
–La maille active du circuit est composée de : la source v(t), des diodes D2 et D3, et de la
charge R,
vt=−
vD2 tvch tvD3 t
.
–Si nous considérons les diodes D2 et D3 parfaites (
VD2=VD3≈0V
), nous retrouvons sur la
charge la totalité du signal d'entrée
vch t=−vt
au signe prés.
–Il est maintenant parfaitement possible de déterminer le courant qui circule dans la charge
ich t=vch t
R=vt
R=iD1 t=it.
Ce courant est identique au courant qui transite dans la
diode D1 et qui est fournis par la source.
Alternance négative : D1 "OFF", D4 "OFF", D2 "ON", D3 "ON".
D2 Ch D3
v t v t v t v t 0 V
( III. 0 )
D2 D3
v t v t 0 V
Ch
v t v t
( III. 0 )
Fait sous Linux et OpenOffice/Staroffice page 2/14

Chapitre IV – Les redresseurs monophasés -
Ch
Ch D2
v t v t
i t i t i t
R R
( III. 0 )
D1 D2 Ch
v t v t v t 0 V
D1 Ch
v t v t v t
( III. 0 )
Figure III. 1 : Formes d’onde et schémas partiels de fonctionnement pour le pont de diodes.
Grandeurs caractéristiques :
Calcul des tensions :
Ch
v t 100 Hz
( III. 0 )
Ch moy eff
2
V 2 V
( III. 0 )
Ch eff eff
V V
( III. 0 )
D inv max eff
V 2 V
( III. 0 )
Calcul des courants :
Ch moy eff
Ch moy
VV2
I 2
R R
( III. 0 )
Ch moy eff
D1 moy
IV2
I2 R
( III. 0 )
Fait sous Linux et OpenOffice/Staroffice page 3/14
v(t)
iD1(t)
D1 et D4D2 et D3
i(t)
vD1(t)
iCh(t)
t
TT/2
vCh(t)
t
TT/2
t
TT/2
0
0
0
v(t)
iCh(t)
iD1(t)
vCh(t)
D1
D2
D3
D4
i(t)
VD1
v(t)
iCh(t)
iD1(t)
vCh(t)
D1
D2
D3
D4
i(t)
VD1
D1 et D4
D2 et D3

Chapitre IV – Les redresseurs monophasés -
eff
D1 eff
V
I2 R
( III. 0 )
Puissance absorbée par la charge :
2
Ch eff
2
Ch eff
V
P R I R
( III. 0 )
Dans le cas d’une charge purement résistive, les ondulations de tension ou du courant de sortie sont
importantes, elles valent respectivement, Vmax et Vmax/R.
Le paragraphe suivant montre les moyens de diminuer ces ondulations.
Filtrage
Filtrage capacitif
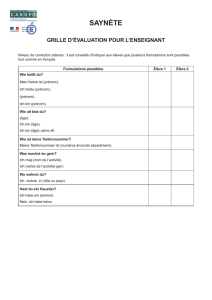
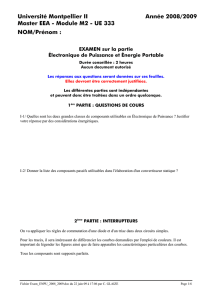
Ce type de filtrage n’est utilisé que pour les redresseurs à diodes. L’avantage d’un tel montage est de
diminuer l’ondulation de la tension vCh(t). De plus, la présence du condensateur peut permettre de
stocker de l’énergie venant de la charge (MCC par exemple). Ceci est d’autant plus intéressant que
le pont de diodes n’est pas réversible. Il faut néanmoins surveiller la tension aux bornes du
condensateur pour ne pas dépasser sa valeur limite.
Figure III. 2 : Formes d’onde pour le filtrage capacitif, Montage.
Comme le montre la figure précédente, le temps de conduction des diodes diminue. En effet une
diode est passante lorsque VA – VK > 0 V. Dans cette configuration, cela signifie que v(t) doit être
supérieure à vCh(t) (tension aux bornes de C).
Ce fonctionnement apporte quelques inconvénients :
- Pointes de courant, fort di/dt perturbations sur le réseau (harmoniques de courant), rayonnement
électromagnétique,
- Mauvaises conditions de fonctionnement des diodes (et du transformateur placé en amont).
Pour ces raisons, ce montage n’est à utiliser que pour des équipements de faibles puissances.
Filtrage Inductif
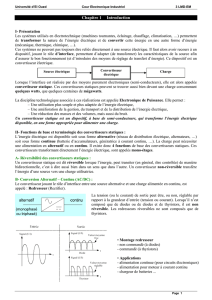
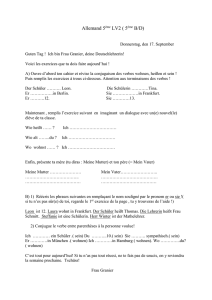
Ce type de filtrage est utilisé indifféremment pour des montages à diodes ou à thyristors. Sur la
Figure III. 3, le courant iCh(t) ne s’annule jamais, le terme employé pour décrire ce fonctionnement
est le régime de conduction continue (ou ininterrompue).
Fait sous Linux et OpenOffice/Staroffice page 4/14
vCh(t) avec condensateur$: trait continu.
vCh(t) sans condensateur$: pointillé.
iCh(t)
t
TT/2
0
D1
D4
D2
D3
C
iCh(t)
VCh(t)
R
VR(t)
iCh(t)
L
vCh(t)
R
D1 et D4D2 et D3
iCh(t)
t
TT/2
vCh(t)
0

Chapitre IV – Les redresseurs monophasés -
Figure III. 3 : Formes d’onde pour le filtrage inductif, Montage.
- Fonctionnement :
Contrairement au cas de la résistance seule, au moment de la commutation entre D1 et D2, à t = T/2,
le courant n’est pas nul.
Pour t = T/2, la tension vD2(t) tend à devenir supérieure à 0 V. Ainsi rien n’empêche cette diode de
devenir passante. La diode D1 est, au même moment, toujours passante puisque le courant ne s’est
pas annulé. La Figure III. 4, montre ce qui se passe lors de la commutation.
Le courant du réseau, i(t), ne peut pas instantanément passé de sa valeur positive à sa valeur
négative. La pente de ce courant est liée aux inductances de fuite du transformateur placé en amont
et aux inductances du réseau. Sur la figure, ces inductances sont symbolisées par Lfuite (inductance
totale ramenée au secondaire).
A tout moment, il faut respecter l’équation suivante :
D1 D2
i t i t i t
( III. 0 )
Ainsi, le courant va croître dans D2 et décroître dans D1, assurant ainsi son blocage pour iD1(t) nul,
c’est la fin de la commutation.
Le phénomène décrit plus haut (D1 et D2 "ON") est appelé empiètement. Il est donc lié aux
inductances totales ramenées au secondaire du transformateur.
Fait sous Linux et OpenOffice/Staroffice page 5/14
iCh(t) avec inductance$: trait continu.
iCh(t) sans inductance$: pointillé.
iCh(t)
t
TT/2
0
v(t)
t
TT/2
0
i(t)
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%